OpenCV中的模板匹配
模板匹配(Template Matching)是计算机视觉中的一种技术,用于在大图像中找到与小图像(模板)相匹配的部分。OpenCV提供了多种模板匹配的方法,主要包括基于相关性和基于平方差的匹配方法。
1. 基本原理
模板匹配的基本原理是通过滑动模板图像(template)在源图像(source)上,计算每个位置的匹配得分,从而找到最匹配的位置。
2. 函数接口
在OpenCV中,模板匹配主要通过cv2.matchTemplate()函数来实现。其基本用法如下:
python
result = cv2.matchTemplate(image, template, method)image: 源图像(在其中搜索匹配区域)。template: 模板图像(需要匹配的图像部分)。method: 匹配方法,常用的方法有:cv2.TM_SQDIFF: 平方差匹配。cv2.TM_SQDIFF_NORMED: 归一化平方差匹配。cv2.TM_CCORR: 相关匹配。cv2.TM_CCORR_NORMED: 归一化相关匹配。cv2.TM_CCOEFF: 相关系数匹配。cv2.TM_CCOEFF_NORMED: 归一化相关系数匹配。
3. 方法选择
不同的方法适用于不同的应用场景:
cv2.TM_SQDIFF和cv2.TM_SQDIFF_NORMED: 适用于模板和图像之间的匹配误差较小时。cv2.TM_CCORR和cv2.TM_CCORR_NORMED: 适用于图像亮度变化不大的场景。cv2.TM_CCOEFF和cv2.TM_CCOEFF_NORMED: 适用于图像中存在线性亮度变化的情况。
4. 性能优化
模板匹配的计算复杂度较高,对于大图像和模板,计算时间可能较长。可以通过以下方法进行优化:
- 调整模板图像的大小。
- 使用多尺度匹配(Multi-Scale Matching),即在不同尺度下进行匹配。
- 使用图像金字塔(Image Pyramid)技术减少计算量。
通过合理选择匹配方法和优化策略,可以有效提高模板匹配的效率和准确性。
以下是详细介绍模板匹配的相关内容:
基本步骤
-
读取图像和模板:
使用
cv2.imread函数读取原始图像和模板图像。 -
转换为灰度图像:
使用
cv2.cvtColor将图像转换为灰度图像。模板匹配通常在灰度图像上进行,以减少计算复杂度。 -
执行模板匹配:
使用
cv2.matchTemplate函数在原图像中搜索模板图像,并返回匹配结果。 -
设置阈值并找到匹配位置:
使用
numpy函数找到匹配结果中大于或等于阈值的位置。 -
绘制矩形框标记匹配区域:
使用
cv2.rectangle函数在原图像中绘制矩形框标记匹配区域。 -
显示结果:
使用
matplotlib或 OpenCV 显示结果图像。
详细代码示例
python
import cv2
import numpy as np
from matplotlib import pyplot as plt
# Load the images
original_img = cv2.imread('images/test.png')
template_img = cv2.imread('images/test_target.jpg')
# Convert to grayscale
original_gray = cv2.cvtColor(original_img, cv2.COLOR_BGR2GRAY)
template_gray = cv2.cvtColor(template_img, cv2.COLOR_BGR2GRAY)
# Perform template matching
result = cv2.matchTemplate(original_gray, template_gray, cv2.TM_CCOEFF_NORMED)
# Define threshold and find locations above the threshold
threshold = 0.8
loc = np.where(result >= threshold)
# Draw rectangles around detected matches
for pt in zip(*loc[::-1]):
cv2.rectangle(original_img, pt, (pt[0] + template_gray.shape[1], pt[1] + template_gray.shape[0]), (0, 0, 255), 2)
# Display the result
plt.figure(figsize=(10, 10))
plt.imshow(cv2.cvtColor(original_img, cv2.COLOR_BGR2RGB))
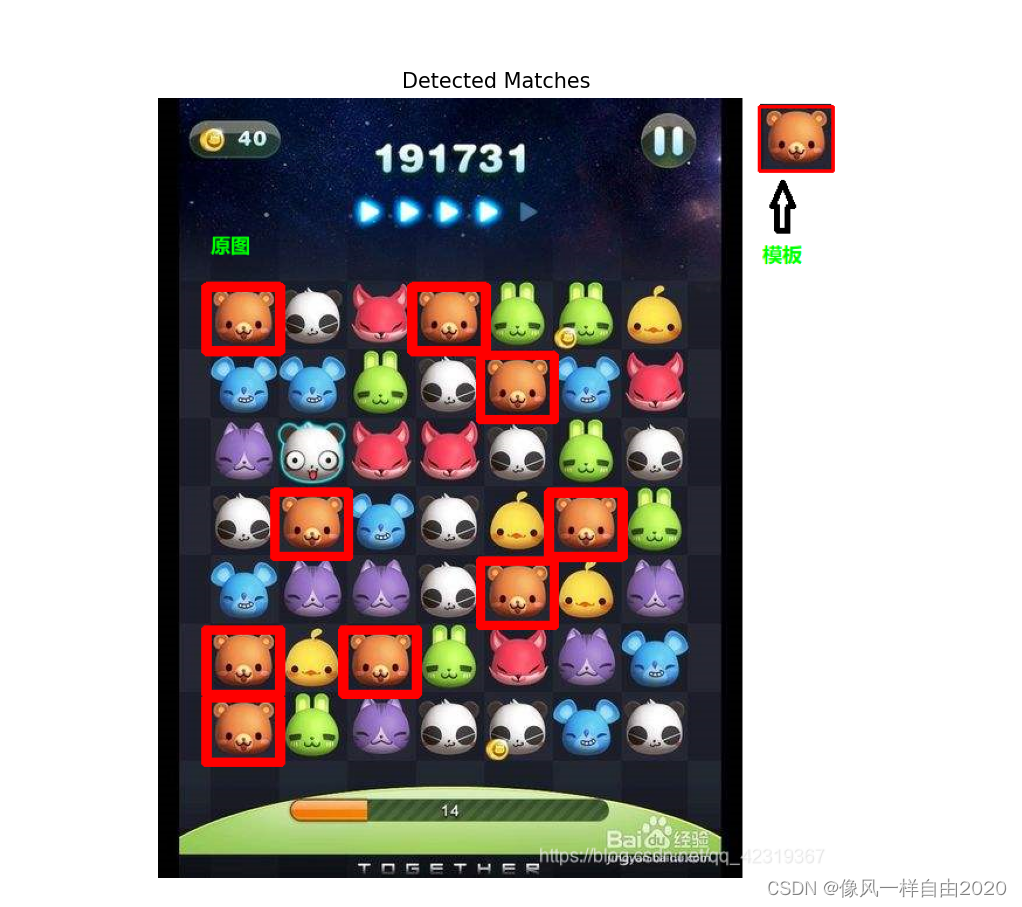
plt.title('Detected Matches')
plt.axis('off')
plt.show()运行结果如下:
下面是详细的中文解释:
python
import cv2
import numpy as np
from matplotlib import pyplot as plt导入库
cv2:OpenCV库的Python接口,用于图像处理和计算机视觉。numpy:数值计算库,用于处理多维数组。pyplot:matplotlib库的一个子库,用于绘图和数据可视化。
python
# Load the images
original_img = cv2.imread('images/test.png')
template_img = cv2.imread('images/test_target.jpg')加载图像
- 使用
cv2.imread函数读取图像文件,将原始图像保存到original_img变量中,将模板图像保存到template_img变量中。 - 需要根据实际文件路径替换 'images/test.png' 和 'images/test_target.jpg'。
python
# Convert to grayscale
original_gray = cv2.cvtColor(original_img, cv2.COLOR_BGR2GRAY)
template_gray = cv2.cvtColor(template_img, cv2.COLOR_BGR2GRAY)转换为灰度图
- 使用
cv2.cvtColor函数将原始图像和模板图像从 BGR 色彩空间转换为灰度图,以简化后续的计算。
python
# Perform template matching
result = cv2.matchTemplate(original_gray, template_gray, cv2.TM_CCOEFF_NORMED)执行模板匹配
- 使用
cv2.matchTemplate函数在灰度原图中搜索模板图像。 cv2.TM_CCOEFF_NORMED是一种匹配方法,表示归一化的相关系数匹配。
python
# Define threshold and find locations above the threshold
threshold = 0.8
loc = np.where(result >= threshold)定义阈值并找到匹配位置
- 设置匹配结果的阈值
threshold为 0.8,表示只有相关系数大于或等于 0.8 的位置才被认为是匹配的。 - 使用
np.where函数找到匹配结果矩阵中所有大于或等于阈值的位置,返回这些位置的坐标。
python
# Draw rectangles around detected matches
for pt in zip(*loc[::-1]):
cv2.rectangle(original_img, pt, (pt[0] + template_gray.shape[1], pt[1] + template_gray.shape[0]), (0, 0, 255), 2)绘制矩形框
- 遍历所有检测到的匹配位置,并在原图上绘制矩形框。
zip(*loc[::-1])将匹配位置的坐标转换为 (x, y) 对,以便在图像上绘制矩形框。cv2.rectangle函数用于绘制矩形框:- 第一个参数是图像。
- 第二个参数是矩形的左上角坐标。
- 第三个参数是矩形的右下角坐标。
- 第四个参数是矩形框的颜色,这里是红色
(0, 0, 255)。 - 第五个参数是矩形框的粗细,这里设置为 2。
python
# Display the result
plt.figure(figsize=(10, 10))
plt.imshow(cv2.cvtColor(original_img, cv2.COLOR_BGR2RGB))
plt.title('Detected Matches')
plt.axis('off')
plt.show()显示结果
- 使用 matplotlib 库显示带有矩形框的原图。
plt.figure设置显示窗口的大小,这里是 10x10 英寸。plt.imshow显示图像,并将图像从 BGR 色彩空间转换为 RGB,以便正确显示颜色。plt.title设置图像的标题,这里是 'Detected Matches'。plt.axis('off')隐藏坐标轴,以便更好地显示图像。plt.show显示图像。
运行上述代码后,你会看到原始图像中标记出所有匹配模板的位置,每个匹配位置都会用红色矩形框标记出来。
模板匹配方法
OpenCV 提供了几种不同的模板匹配方法,可以通过 cv2.matchTemplate 函数的第三个参数指定:
- cv2.TM_SQDIFF: 平方差匹配法,计算平方差。数值越小越匹配。
- cv2.TM_SQDIFF_NORMED: 归一化平方差匹配法。
- cv2.TM_CCORR: 相关系数匹配法,计算相关系数。数值越大越匹配。
- cv2.TM_CCORR_NORMED: 归一化相关系数匹配法。
- cv2.TM_CCOEFF: 相关匹配法,计算相关值。数值越大越匹配。
- cv2.TM_CCOEFF_NORMED: 归一化相关匹配法。
示例中的关键函数
cv2.imread(filename, flags): 读取图像。cv2.cvtColor(src, code): 转换颜色空间。cv2.matchTemplate(image, templ, method): 执行模板匹配。np.where(condition): 返回满足条件的数组索引。cv2.rectangle(img, pt1, pt2, color, thickness): 绘制矩形框。
注意事项
- 模板匹配是一个计算密集型任务,对于较大的图像和模板,计算时间会显著增加。
- 匹配结果受图像噪声、旋转、缩放等因素的影响,因此在实际应用中,可能需要预处理图像或结合其他方法(如特征匹配)来提高准确性。
实际应用
模板匹配广泛应用于图像识别、物体检测等领域,例如:
- 在游戏中检测特定图案或标志。
- 在工业视觉系统中检测缺陷或零部件位置。
- 在医学图像中检测特定器官或病变。