最近在调试一款电机驱动板 使用的是CAN总线而且板子上只有一个CAN
想移植Easylogger到上面试试easylogger的效果,先实现pritnf的重定向功能来打印输出
只需要添加以下代码即可实现
代码
c
#include <stdarg.h>
uint8_t FDCAN_UserTxBuffer[512];
void FDCAN_printf(const char *format, ...)
{
va_list args;
uint32_t length;
va_start(args, format);
length = vsnprintf((char *)FDCAN_UserTxBuffer, 512, (char *)format, args);
va_end(args);
FDCAN_Send_Data(0x100,FDCAN_UserTxBuffer,length);
}
c
/* CAN 发送一帧数据 */
void FDCAN_Send_Message(uint32_t id, uint8_t *buf, uint8_t len)
{
FDCAN_TxHeaderTypeDef TxHeader;
/* 配置Tx缓冲区消息 */
TxHeader.Identifier = id; /* 报文ID */
TxHeader.IdType = FDCAN_EXTENDED_ID; /* 扩展ID模式 */
TxHeader.TxFrameType = FDCAN_DATA_FRAME; /* 数据帧 */
#if defined(CLASSIC_CAN)
if (len >= 8)
len = 8;
uint32_t CAN_FRAME_DL = len ;
#else
uint32_t CAN_FRAME_DL = FDCAN_DLC_BYTES_64; /* FDCAN 默认使用64*/
#endif
TxHeader.DataLength = CAN_FRAME_DL; /* 数据帧长度 */
TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE; /*发送节点错误 */
TxHeader.BitRateSwitch = FDCAN_BRS_OFF; /* 无波特率切换 */
TxHeader.FDFormat = CAN_MODE; /* CAN模式*/
TxHeader.TxEventFifoControl = FDCAN_STORE_TX_EVENTS;
TxHeader.MessageMarker = 0x01;
/* 发送缓冲区消息 */
HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &TxHeader, buf);
while (HAL_FDCAN_GetTxFifoFreeLevel(&hfdcan1) != 3)
; /*等待发送完成*/
}
/* CAN发送多帧数据 */
void FDCAN_Send_Data(uint32_t id, uint8_t *buf, uint32_t len)
{
uint32_t transmission_times = 0; /* 发送次数 */
uint32_t remian_bytes = 0; /* 剩余字节 */
uint32_t frame_length = 0; /* 帧长度 */
#if defined(CLASSIC_CAN)
frame_length = 8;
#else
frame_length = 64;
#endif
transmission_times = len / frame_length;
remian_bytes = len % frame_length;
int i = 0;
while (i < transmission_times)
{
FDCAN_Send_Message(id, buf + i * frame_length, len);
i++;
}
if (remian_bytes > 0)
{
FDCAN_Send_Message(id, buf + transmission_times * frame_length, remian_bytes);
}
}定义了一个宏定义来实现log测试和应用的分离
c
/**
* @brief 输出日志任务
* @param argument
*/
void USER_LOG_Task(void *argument)
{
for (;;)
{
#ifdef USER_LOG_ENABLE
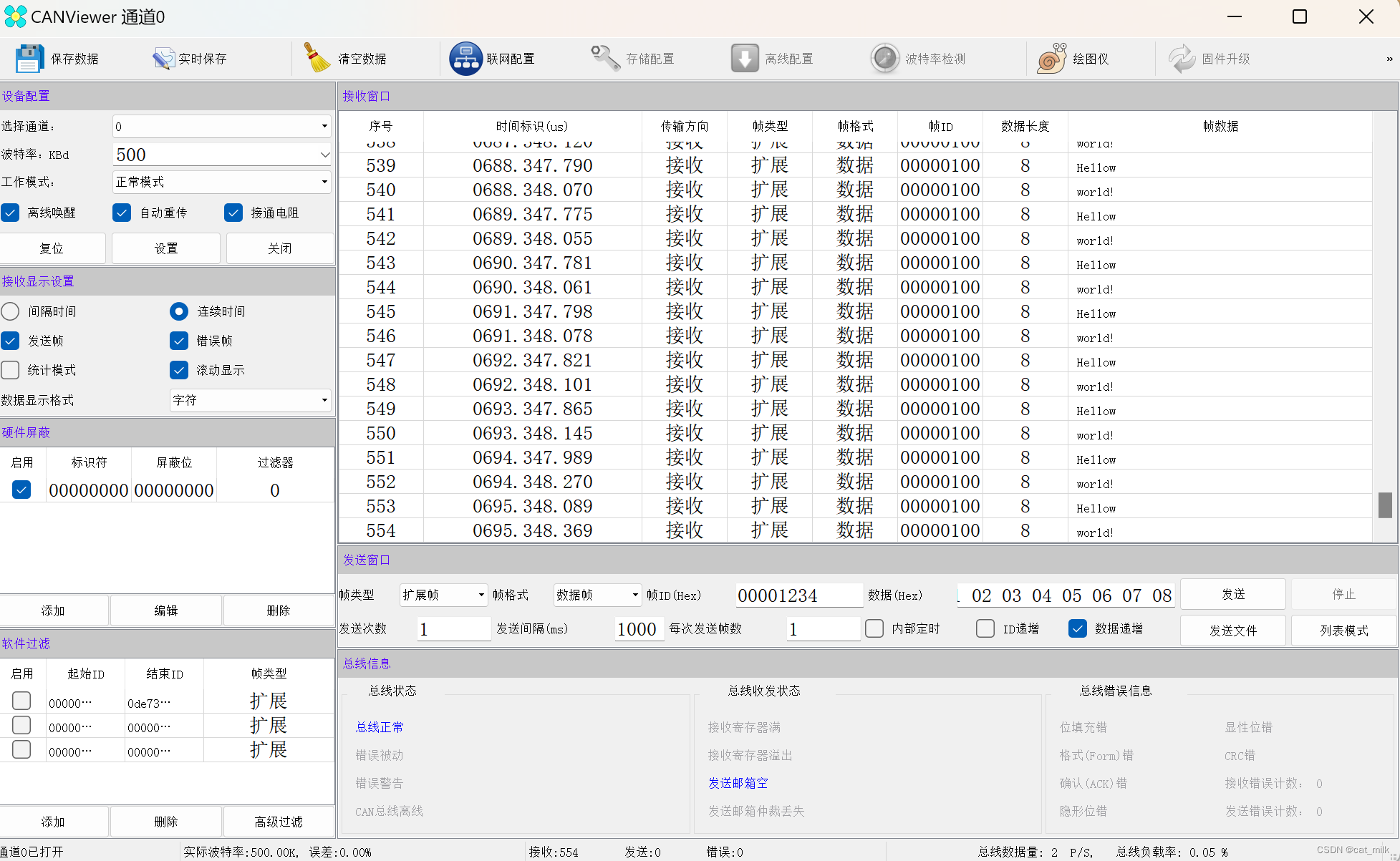
FDCAN_printf("\n Hellow world!\n");
#endif
osDelay(1000);
}
}实验效果