Linux 并发与竞争实验学习
原子操作实验
这里原子操作就是采用原子变量来保护一个程序运行的完整过程,使用atomic 来实现一次只能允许一个应用访问 LED,创建atomic.c文件,其实改动内容就是添加原子变量,
要在设备结构体数据添加原子变量,具体代码如下:
c
struct gpioled_dev
{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led 所使用的 GPIO 编号 */
atomic_t lock; /* 原子变量 */
};首先是这个函数led_init:
这个函数要先初始化原子变量,以便于首次运行APP检查原子变量不出错。这里是初始化为1.
c
atomic_set(&gpioled.lock, 1); /* 原子变量初始值为 1 */然后open函数检查原子变量的值,具体代码如下:
c
if (!atomic_dec_and_test(&gpioled.lock))
{
atomic_inc(&gpioled.lock); /* 小于 0 的话就加 1,使其原子变量等于 0 */
return -EBUSY; /* LED 被使用,返回忙 */
}每次打开驱动设备的时候先使用 atomic_dec_and_test 函数将 lock 减 1,如果 atomic_dec_and_test函数返回值为真就表示 lock 当前值为 0,说明设备可以使用。如果 atomic_dec_and_test 函数返回值为假,就表示 lock 当前值为负数(lock 值默认是 1), lock 值为负数的可能性只有一个,那就是其他设备正在使用 LED。其他设备正在使用 LED 灯,那么就只能退出了,在退出之前调用函数 atomic_inc 将 lock 加 1,因为此时 lock 的值被减成了负数,必须要对其加 1,将 lock 的值变为 0。
c
static int led_release(struct inode *inode, struct file *filp)
{
struct gpioled_dev *dev = filp->private_data;
/* 关闭驱动文件的时候释放原子变量 */
atomic_inc(&dev->lock);
return 0;
}然后还要模拟占用LED25秒,atomicApp.c程序具体如下:
c
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#define LEDOFF 0
#define LEDON 1
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
unsigned char cnt = 0;
unsigned char databuf[1];
if (argc != 3)
{
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if (fd < 0)
{
printf("file %s open failed!\r\n", argv[1]);
return -1;
}
databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 */
/* 向/dev/gpioled 文件写入数据 */
retvalue = write(fd, databuf, sizeof(databuf));
if (retvalue < 0)
{
printf("LED Control Failed!\r\n");
close(fd);
return -1;
}
while (1)
{
sleep(5);
cnt++;
printf("App running times:%d\r\n", cnt);
if (cnt >= 5)
break;
}
printf("App running finished!");
retvalue = close(fd); /* 关闭文件 */
if (retvalue < 0)
{
printf("file %s close failed!\r\n", argv[1]);
return -1;
}
return 0;
}测试 APP 在获取到 LED 灯驱动的使用权以后会使用 25S。编译程序,通过网络挂载,测试原子操作。
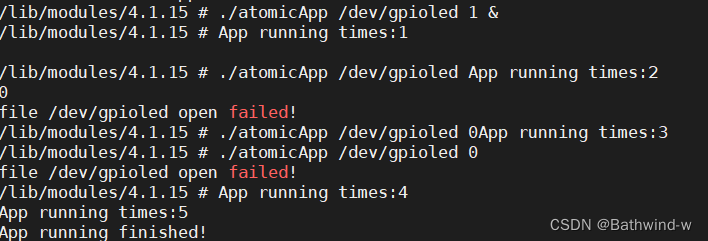
出现如图则证明成功。
自旋锁实验
①、自旋锁保护的临界区要尽可能的短,因此在 open 函数中申请自旋锁,然后在 release 函
数中释放自旋锁的方法就不可取。我们可以使用一个变量来表示设备的使用情况,如果设备被
使用了那么变量就加一,设备被释放以后变量就减 1,我们只需要使用自旋锁保护这个变量即
可。
②、考虑驱动的兼容性,合理的选择 API 函数。
具体驱动程序为:
c
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* gpioled 设备结构体 */
struct gpioled_dev
{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led 所使用的 GPIO 编号 */
int dev_stats; /* 设备状态, 0,设备未使用;>0,设备已经被使用 */
spinlock_t lock; /* 自旋锁变量 */
};
struct gpioled_dev gpioled; /* led 设备 */
static int led_open(struct inode *inode, struct file *filp)
{
unsigned long flags;
filp->private_data = &gpioled; /* 设置私有数据 */
spin_lock_irqsave(&gpioled.lock, flags); /* 上锁 */
if (gpioled.dev_stats)
{ /* 如果设备被使用了 */
spin_unlock_irqrestore(&gpioled.lock, flags); /* 解锁 */
return -EBUSY;
}
gpioled.dev_stats++; /* 如果设备没有打开,那么就标记已经打开了 */
spin_unlock_irqrestore(&gpioled.lock, flags); /*解锁*/
return 0;
}
/*
* @description : 从设备读取数据
* @param -- filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param -- offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
73 * @description : 向设备写数据
74 * @param - filp : 设备文件,表示打开的文件描述符
75 * @param - buf : 要写给设备写入的数据
76 * @param - cnt : 要写入的数据长度
77 * @param -- offt : 相对于文件首地址的偏移
78 * @return : 写入的字节数,如果为负值,表示写入失败
79 */
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data;
retvalue = copy_from_user(databuf, buf, cnt);
if (retvalue < 0)
{
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0]; /* 获取状态值 */
if (ledstat == LEDON)
{
gpio_set_value(dev->led_gpio, 0); /* 打开 LED 灯 */
}
else if (ledstat == LEDOFF)
{
gpio_set_value(dev->led_gpio, 1); /* 关闭 LED 灯 */
}
return 0;
}
/*
104 * @description : 关闭/释放设备
105 * @param -- filp : 要关闭的设备文件(文件描述符)
106 * @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
unsigned long flags;
struct gpioled_dev *dev = filp->private_data;
/* 关闭驱动文件的时候将 dev_stats 减 1 */
spin_lock_irqsave(&dev->lock, flags); /* 上锁 */
if (dev->dev_stats)
{
dev->dev_stats--;
}
spin_unlock_irqrestore(&dev->lock, flags); /* 解锁 */
return 0;
}
/* 设备操作函数 */
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
static int __init led_init(void)
{
int ret = 0;
spin_lock_init(&gpioled.lock);
/* 设置 LED 所使用的 GPIO */
/* 1、获取设备节点: gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
if (gpioled.nd == NULL)
{
printk("gpioled node cant not found!\r\n");
return -EINVAL;
}
else
{
printk("gpioled node has been found!\r\n");
}
/* 2、 获取设备树中的 gpio 属性,得到 LED 所使用的 LED 编号 */
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0);
if (gpioled.led_gpio < 0)
{
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", gpioled.led_gpio);
ret = gpio_direction_output(gpioled.led_gpio, 1);
if (ret < 0)
{
printk("can't set gpio!\r\n");
}
/*1、创建设备号*/
if (gpioled.major)
{
gpioled.devid = MKDEV(gpioled.major, 0);
register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);
}
else
{
alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME);
gpioled.major = MAJOR(gpioled.devid);
gpioled.minor = MINOR(gpioled.devid);
}
printk("newcheled major: %d minor: %d", gpioled.major, gpioled.minor);
gpioled.cdev.owner = THIS_MODULE;
cdev_init(&gpioled.cdev, &gpioled_fops);
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if (IS_ERR(gpioled.class))
{
return PTR_ERR(gpioled.class);
}
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if (IS_ERR(gpioled.device))
{
return PTR_ERR(gpioled.device);
}
return 0;
}
static void __exit led_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&gpioled.cdev); /* 删除 cdev */
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT);
device_destroy(gpioled.class, gpioled.devid);
class_destroy(gpioled.class);
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("wyw");测试App和上面的保持一致即可。
信号量实验:
c
#include <linux/semaphore.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* gpioled 设备结构体 */
struct gpioled_dev
{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* led 所使用的 GPIO 编号 */
struct semaphore sem; /* 信号量 */
};
struct gpioled_dev gpioled; /* led 设备 */
static int led_open(struct inode *inode, struct file *filp)
{
filp->private_data = &gpioled; /* 设置私有数据 */
/* 获取信号量,进入休眠状态的进程可以被信号打断 */
if (down_interruptible(&gpioled.sem))
{
return -ERESTARTSYS;
}
#if 0
down(&gpioled.sem); /* 不能被信号打断 */
#endif
return 0;
}
/*
* @description : 从设备读取数据
* @param -- filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param -- offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
73 * @description : 向设备写数据
74 * @param - filp : 设备文件,表示打开的文件描述符
75 * @param - buf : 要写给设备写入的数据
76 * @param - cnt : 要写入的数据长度
77 * @param -- offt : 相对于文件首地址的偏移
78 * @return : 写入的字节数,如果为负值,表示写入失败
79 */
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data;
retvalue = copy_from_user(databuf, buf, cnt);
if (retvalue < 0)
{
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0]; /* 获取状态值 */
if (ledstat == LEDON)
{
gpio_set_value(dev->led_gpio, 0); /* 打开 LED 灯 */
}
else if (ledstat == LEDOFF)
{
gpio_set_value(dev->led_gpio, 1); /* 关闭 LED 灯 */
}
return 0;
}
/*
104 * @description : 关闭/释放设备
105 * @param -- filp : 要关闭的设备文件(文件描述符)
106 * @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
struct gpioled_dev *dev = filp->private_data;
/* 关闭驱动文件的时候释放原子变量 */
up(&dev->sem); /* 释放信号量,信号量值加 1 */
return 0;
}
/* 设备操作函数 */
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
static int __init led_init(void)
{
int ret = 0;
sema_init(&gpioled.sem, 1);
/* 设置 LED 所使用的 GPIO */
/* 1、获取设备节点: gpioled */
gpioled.nd = of_find_node_by_path("/gpioled");
if (gpioled.nd == NULL)
{
printk("gpioled node cant not found!\r\n");
return -EINVAL;
}
else
{
printk("gpioled node has been found!\r\n");
}
/* 2、 获取设备树中的 gpio 属性,得到 LED 所使用的 LED 编号 */
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0);
if (gpioled.led_gpio < 0)
{
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", gpioled.led_gpio);
ret = gpio_direction_output(gpioled.led_gpio, 1);
if (ret < 0)
{
printk("can't set gpio!\r\n");
}
/*1、创建设备号*/
if (gpioled.major)
{
gpioled.devid = MKDEV(gpioled.major, 0);
register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);
}
else
{
alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME);
gpioled.major = MAJOR(gpioled.devid);
gpioled.minor = MINOR(gpioled.devid);
}
printk("newcheled major: %d minor: %d", gpioled.major, gpioled.minor);
gpioled.cdev.owner = THIS_MODULE;
cdev_init(&gpioled.cdev, &gpioled_fops);
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if (IS_ERR(gpioled.class))
{
return PTR_ERR(gpioled.class);
}
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if (IS_ERR(gpioled.device))
{
return PTR_ERR(gpioled.device);
}
return 0;
}
static void __exit led_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&gpioled.cdev); /* 删除 cdev */
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT);
device_destroy(gpioled.class, gpioled.devid);
class_destroy(gpioled.class);
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
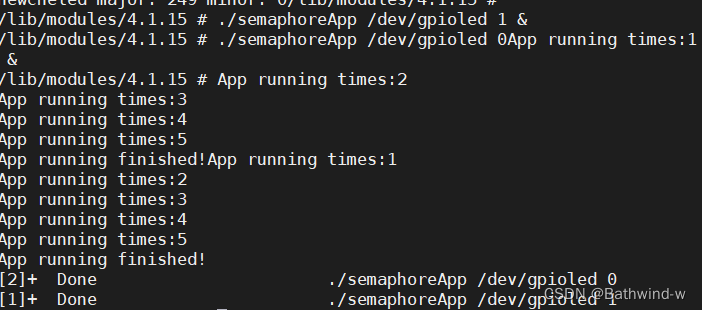
MODULE_AUTHOR("wyw");具体代码如上所示。open函数中申请信号量,可以使用down函数,也可以使用down_interruptible函数。如果信号量值大于等于 1 就表示可用,那么应用程序就会开始使用 LED 灯。如果信号量值为 0 就表示应用程序不能使用 LED 灯,此时应用程序就会进入到休眠状态。等到信号量值大于 1 的时候应用程序就会唤醒,申请信号量,获取 LED 灯使用权实验现象如下:
互斥体实验
互斥实验类似,将信号量对应的部分换为互斥体的部分即可,具体代码如下:
c
55 static int led_open(struct inode *inode, struct file *filp)
56 {
57 filp->private_data = &gpioled; /* 设置私有数据 */
58
59 /* 获取互斥体,可以被信号打断 */
60 if (mutex_lock_interruptible(&gpioled.lock)) {
61 return -ERESTARTSYS;
62 }
63 #if 0
64 mutex_lock(&gpioled.lock); /* 不能被信号打断 */
65 #endif
66 return 0;
67 }
119 static int led_release(struct inode *inode, struct file *filp)
120 {
121 struct gpioled_dev *dev = filp->private_data;
122
123 /* 释放互斥锁 */
124 mutex_unlock(&dev->lock);
125
126 return 0;
127 }
143 static int __init led_init(void)
144 {
145 int ret = 0;
146
147 /* 初始化互斥体 */
148 mutex_init(&gpioled.lock);
......
205 return 0;
206 }