本篇文章依托于stm8单片机和lora模块
目录
一、GPIO口测试相关硬件电路图
(a)USB转串口底板PA3控制LED6
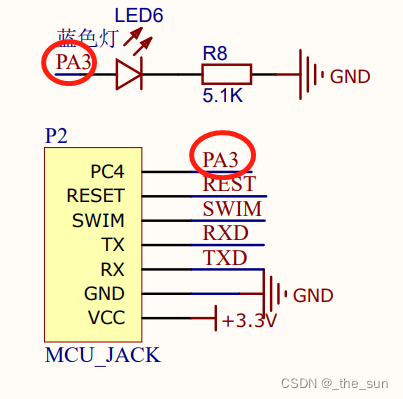
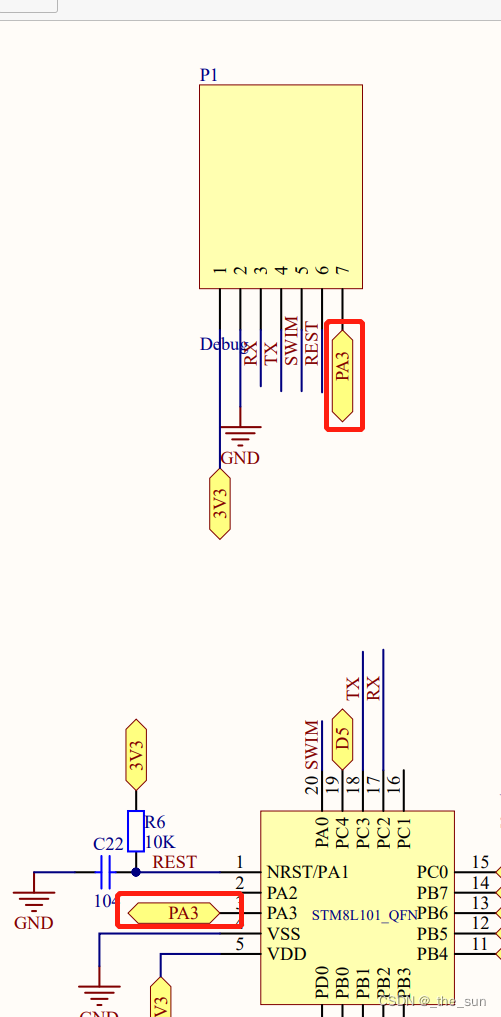
(b)Lora模块底板PA3接口
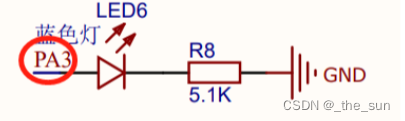
(c)LED灯电路
二、参考官方例程实现GPIO口的输出
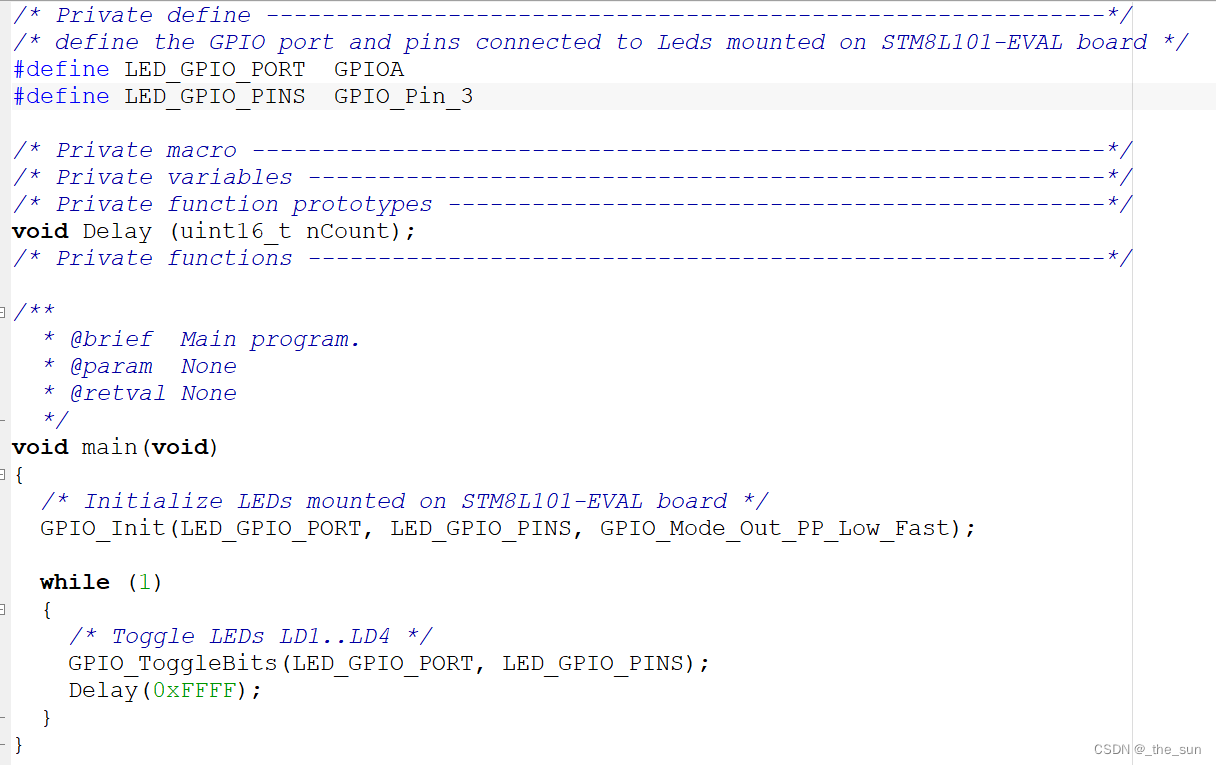
像官方提供的例程一样,只需要更改GPIO后面的端口名和引脚号就能使用
三、GPIO相关函数的了解
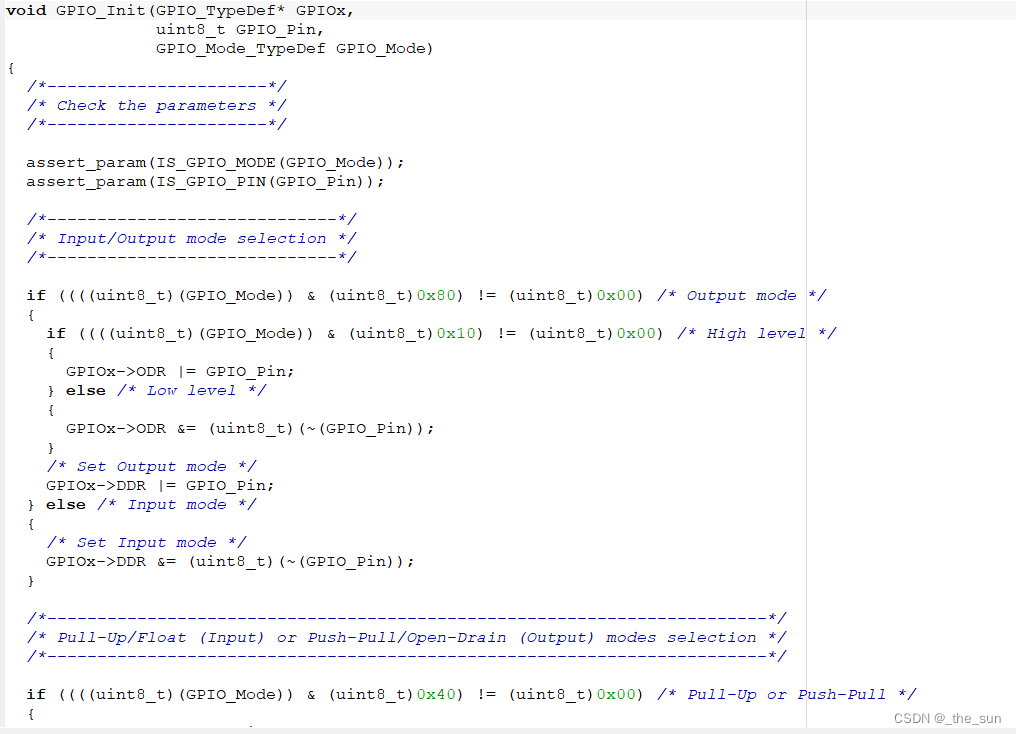
(1)初始化GPIO口
这其中的第一个参数LED_GPIO_PORT指的是要初始化ABCD中的那一个io口,就好像51单片机中我们的P1P2P3P4一样,只不过到了STM8单片机中,我们更名为了ABCD。
第二参数是该io口的第几位(一个io口是8位,就好像P1.3这样)。
而最后一个参数则是GPIO口的模式,如下图。不同的模式代表了该GPIO口是出于输入模式/输出模式,有无内部上拉电阻(一般情况下,外部有上拉电阻我们需要配置为内部没有上拉电阻的;相反的,如果外部没有上拉电阻,我们则需要配置成内部有上拉电阻模式),以及GPIO口的输入输出频率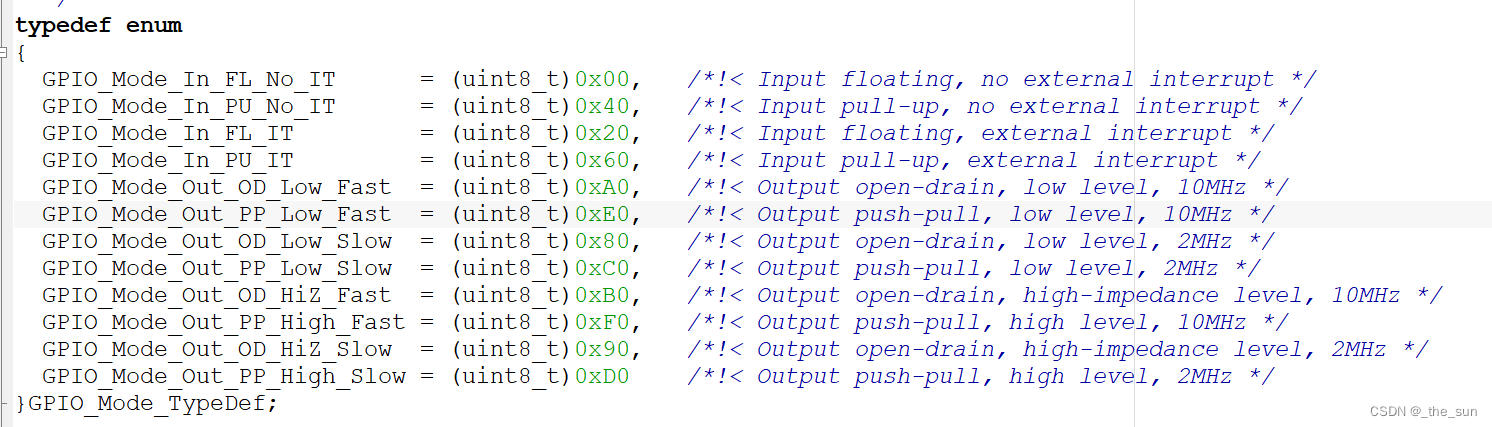
(2)翻转GPIO某一位的电平情况

其中第一参数是哪一个GPIO口,第二个参数则是该GPIO口的哪一位(下图是该函数的实现)
其实对于stm单片机来说,寄存机非常丰富,我们不需要拘泥于自己控制寄存器来实现功能,相反的我们应该多去使用官方提供的例程来帮助我们解决实际问题,这样有利于提高我们的开发效率。
就比如GPIO_Init这个函数,他的底层也非常的复杂,如果想靠自己实现难度很大
因为STM8单片机(以及后面的STM32单片机)的寄存器比较多,如果像51单片机一样,直接对寄存器操作的话,程序代码相对比较复杂。 为了方便工程师的开发,ST官方将对单片机内部寄存器的操作封装成了库文件,方便我们调用。 目前ST提供了两种库,一种是标准库,一种是hal 库。 各有优势。
所以方便大家的学习,建议大家再学习的初期直接使用库函数,不要花太多的精力再寄存器上面,我们需要改变对51单片机开发的思维模式,所以本小段仅供大家了解。