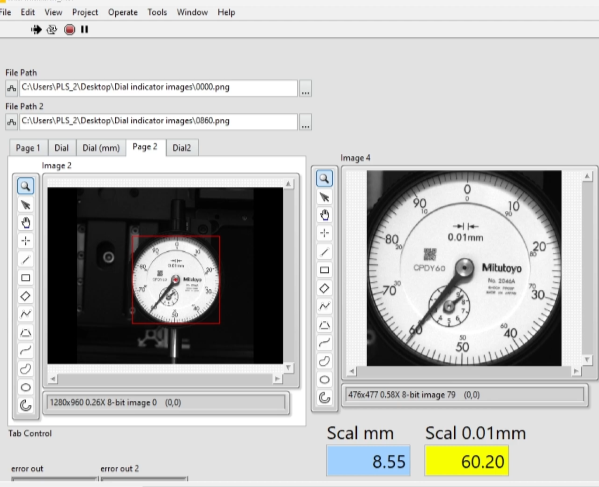
系统利用LabVIEW编程实现对指针式压力仪表的读取,通过相机、光源、固定支架等硬件捕捉仪表图像,并通过图像识别技术解析压力值。系统分为两个阶段:第一阶段固定相机更换仪表,第二阶段移动相机识别多个固定仪表。本文介绍硬件选择、图像识别注意事项、超限估读方法以及移动装置选型等关键技术环节。
所需硬件及其作用
-
相机
-
作用:捕捉指针式压力仪表的图像。
-
选择标准:高分辨率、低噪声、快速捕捉。
-
-
光源
-
作用:提供均匀、稳定的照明,减少图像阴影和反光。
-
选择标准:色温稳定、亮度可调。
-
-
固定支架
-
作用:固定相机和光源,保持图像拍摄的稳定性。
-
选择标准:可调节高度和角度,稳定性好。
-
-
图像采集卡
-
作用:连接相机与计算机,传输图像数据。
-
选择标准:兼容相机接口,数据传输速度快。
-
-
计算机
-
作用:运行LabVIEW软件,处理图像数据。
-
选择标准:高性能处理器,足够的内存和存储空间。
-
LabVIEW图像识别注意事项
-
图像预处理
-
作用:增强图像质量,减少噪声。
-
方法:灰度化、去噪、边缘检测等。
-
-
指针识别
-
作用:准确识别压力仪表指针位置。
-
方法:使用图像处理算法,如霍夫变换。
-
-
刻度识别
-
作用:识别压力仪表的刻度线,确定指针读数。
-
方法:模板匹配或图像分割。
-
超限估读压力值方法
-
指针超限
-
处理方法:根据指针方向和仪表刻度推断压力值。
-
举例:若指针超限右侧,则视为最大刻度值加一定容差。
-
不同仪表处理
-
刻度不同
- 处理方法:根据不同刻度设计相应的图像识别模板。
-
指针形状不同
- 处理方法:针对不同指针形状调整识别算法参数。
第一个阶段注意事项:固定相机,更换仪表
-
相机和仪表的相对位置
- 要求:相机和仪表位置固定,避免每次更换仪表时需重新校准。
-
光源一致性
- 要求:保持光源亮度和角度一致,避免阴影和反光变化。
第二个阶段注意事项:移动相机识别多个固定仪表
-
移动装置选择
-
要求:选择精度高、稳定性好的机械臂或导轨。
-
例子:使用线性导轨或多轴机械臂。
-
-
硬件选型注意事项
-
精度:保证移动装置的重复定位精度。
-
速度:移动速度要与图像处理速度匹配。
-
-
软件处理注意事项
-
坐标校准:建立相机移动坐标系与每个仪表位置的映射。
-
同步控制:确保移动装置与图像采集的同步。
-
通过上述设计,基于LabVIEW的指针式压力仪表图像识别系统能够高效、准确地读取多个仪表的压力值,实现自动化数据采集和分析。