文章目录
- 一、转向传动比概念
- 二、设置转向传动比
-
- [1、C factor概念](#1、C factor概念)
- [2、Steer Kinematics概念](#2、Steer Kinematics概念)
- 3、传动比计算公式
- 三、转向传动比验证
一、转向传动比概念
转向传动比(Steering Ratio)表示方向盘转动角度与车轮转动角度之间的关系。公式如下:
转向传动比 = 方向盘转动角度 车轮转动角度 \text{转向传动比} = \frac{\text{方向盘转动角度}}{\text{车轮转动角度}} 转向传动比=车轮转动角度方向盘转动角度
例如,假设方向盘转动 360 度,而车轮转动 30 度,那么转向传动比为:
转向传动比 = 36 0 ∘ 3 0 ∘ = 12 : 1 \text{转向传动比} = \frac{360^\circ}{30^\circ} = 12:1 转向传动比=30∘360∘=12:1
二、设置转向传动比
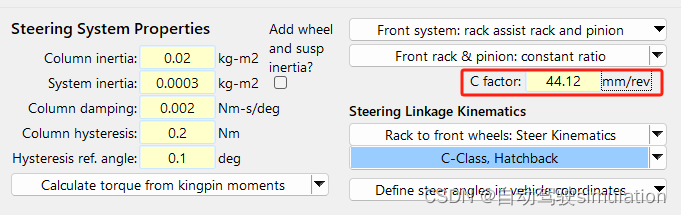
1、C factor概念
C factor : 方向盘转一圈齿条移动的位移 \text{C factor} : {\text{方向盘转一圈齿条移动的位移}} C factor:方向盘转一圈齿条移动的位移
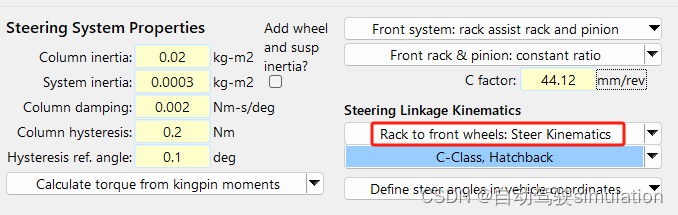
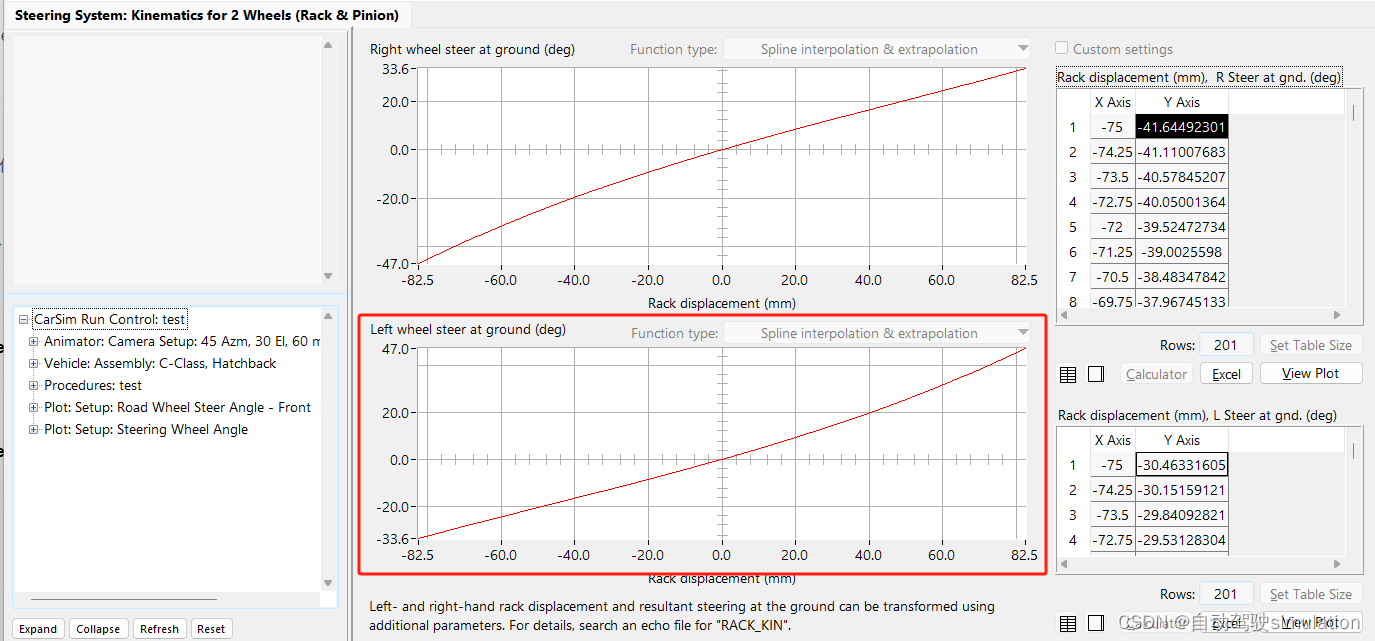
2、Steer Kinematics概念
Rack to front wheels: Steer Kinematics : 齿条位移和前轮转角之间的关系 \text{Rack to front wheels: Steer Kinematics} : {\text{齿条位移和前轮转角之间的关系}} Rack to front wheels: Steer Kinematics:齿条位移和前轮转角之间的关系
3、传动比计算公式
1)由于Carsim中没有直接设置转向传动比的关系,在Carsim中计算传动比的关系式如下:
转向传动比 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{转向传动比} = 1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 转向传动比=1/((C factor / 360)∗Steer Kinematics)
注意:这里需要c factor / 360,因为要将rev转换成deg;
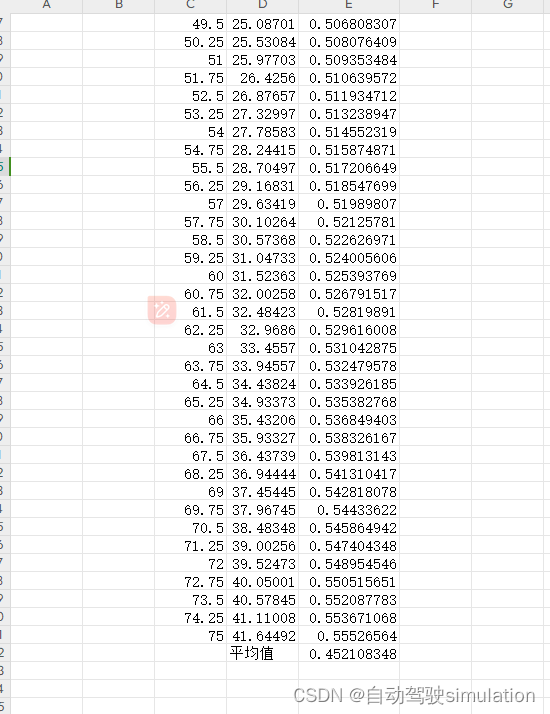
2)假设取左前轮斜率的平均值,得Steer Kinematics(平均) = 0.45 (deg/mm);
计算Steer Kinematics平均值:
3)假设你需要的传动比是12,推导得:
转向传动比 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{转向传动比} =1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 转向传动比=1/((C factor / 360)∗Steer Kinematics)
得:
12 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{12} =1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 12=1/((C factor / 360)∗Steer Kinematics)
得:
12 = 1 / ( (C factor / 360) ∗ 0.452 ) 得 : C f a c t o r ≈ 66.67 ( m m / r e v ) \text{12} =1 / ({\text{(C factor / 360)}}*{\text{0.452}}) 得 : C factor ≈ 66.67(mm/rev) 12=1/((C factor / 360)∗0.452)得:Cfactor≈66.67(mm/rev)
三、转向传动比验证
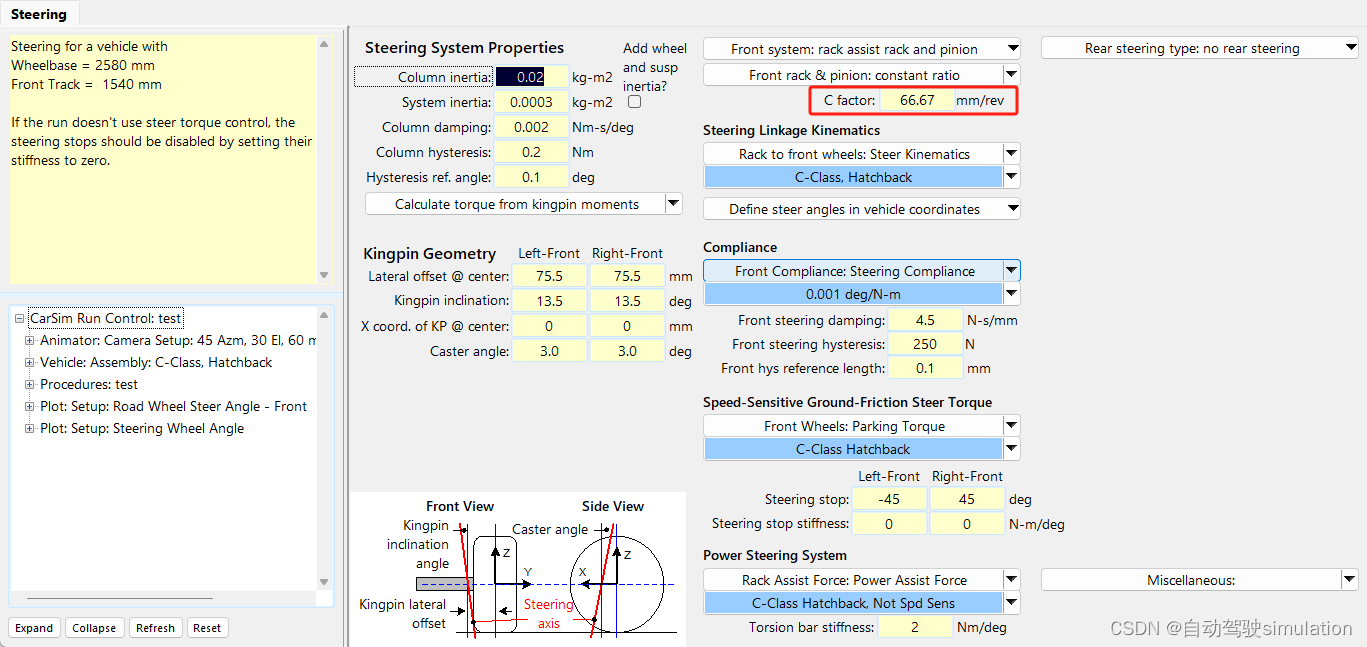
1、由上述可得传动比为12的时候,C factor为66.67(mm/rev),代入carsim:
2、设置方向盘输出角度为120deg,由于12 = 传动比 = 方向盘角度 / 前轮转角,因此前轮转角大概为10deg左右;
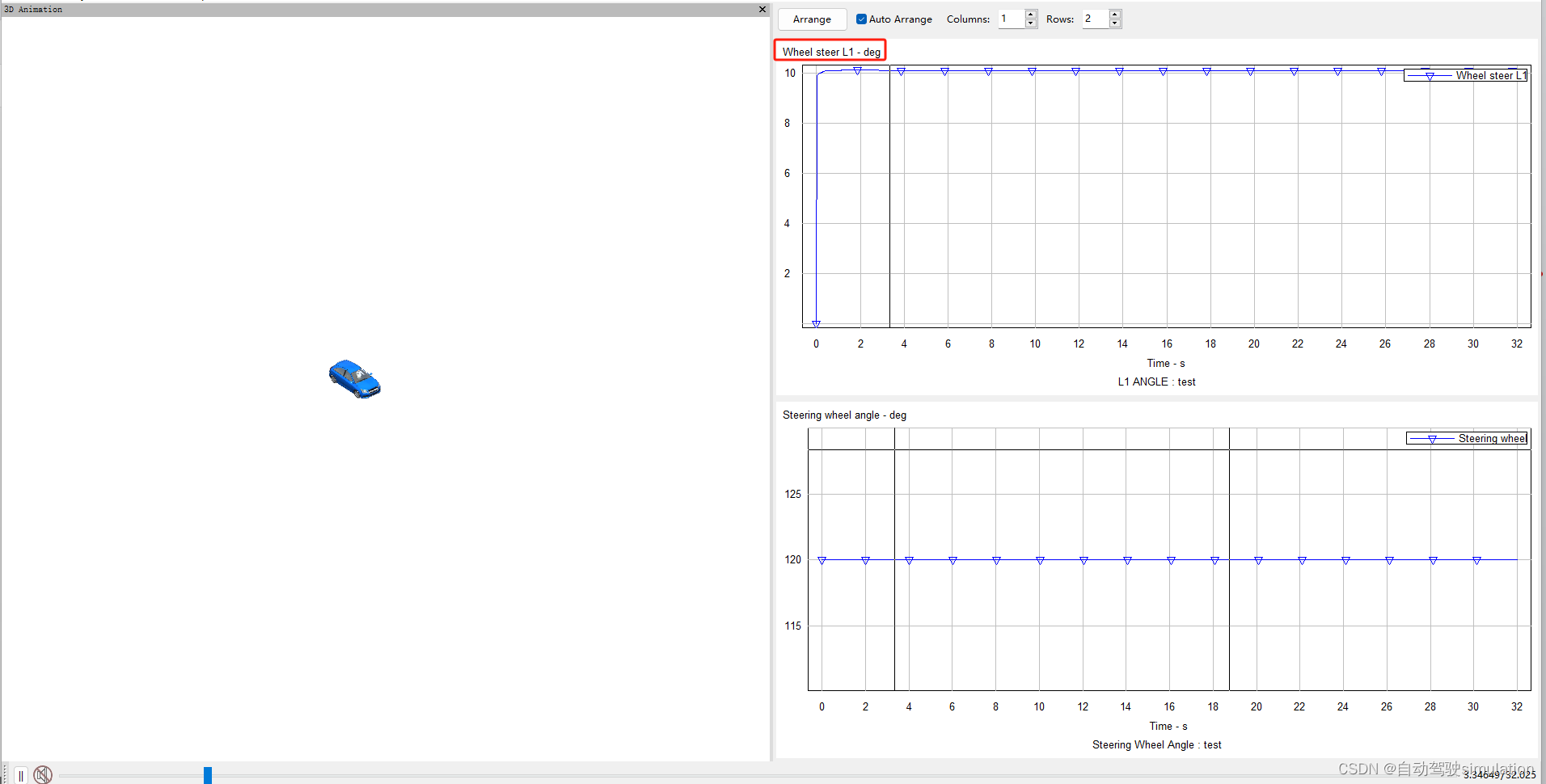
曲线结果符合预期,因此公式正确;