OpenCV 车道检测
前言
如果要检测道路图像中的车道,方法之一是利用深度学习的语义分割技术。而在 OpenCV 中解决此问题可以使用边缘检测器。在本节中,我们将了解如何使用边缘检测和直线检测识别道路图像中的车道。
模型分析
使用 OpenCV 检测图像中道路边缘的策略如下:
- 检测图像中的对象边缘
- 识别遵循直线且连接的边缘
- 从图像的一端延伸识别出的直线至另一端
车道检测
(1) 导入库并查看示例图像:
python
import cv2, numpy as np
import matplotlib.pyplot as plt,cv2
IMG = cv2.imread('3.jpeg')
img = np.uint8(IMG.copy())
图像中包含许多信息,但本节中我们只需要检测直线。使用 Canny 边缘检测器可以获取图像边缘,当颜色发生剧烈变化时,Canny 检测器会将其识别为边缘,颜色变化在数学上取决于图像内像素的梯度。两个像素的差异越大,像素表示物体边缘的可能性就越高。
(2) 使用 cv2.Canny 边缘检测器获取图像中的边缘:
python
img = cv2.blur(img, (5,5))
edges = cv2.Canny(img,150,200)
plt.imshow(edges, cmap='gray')
plt.show()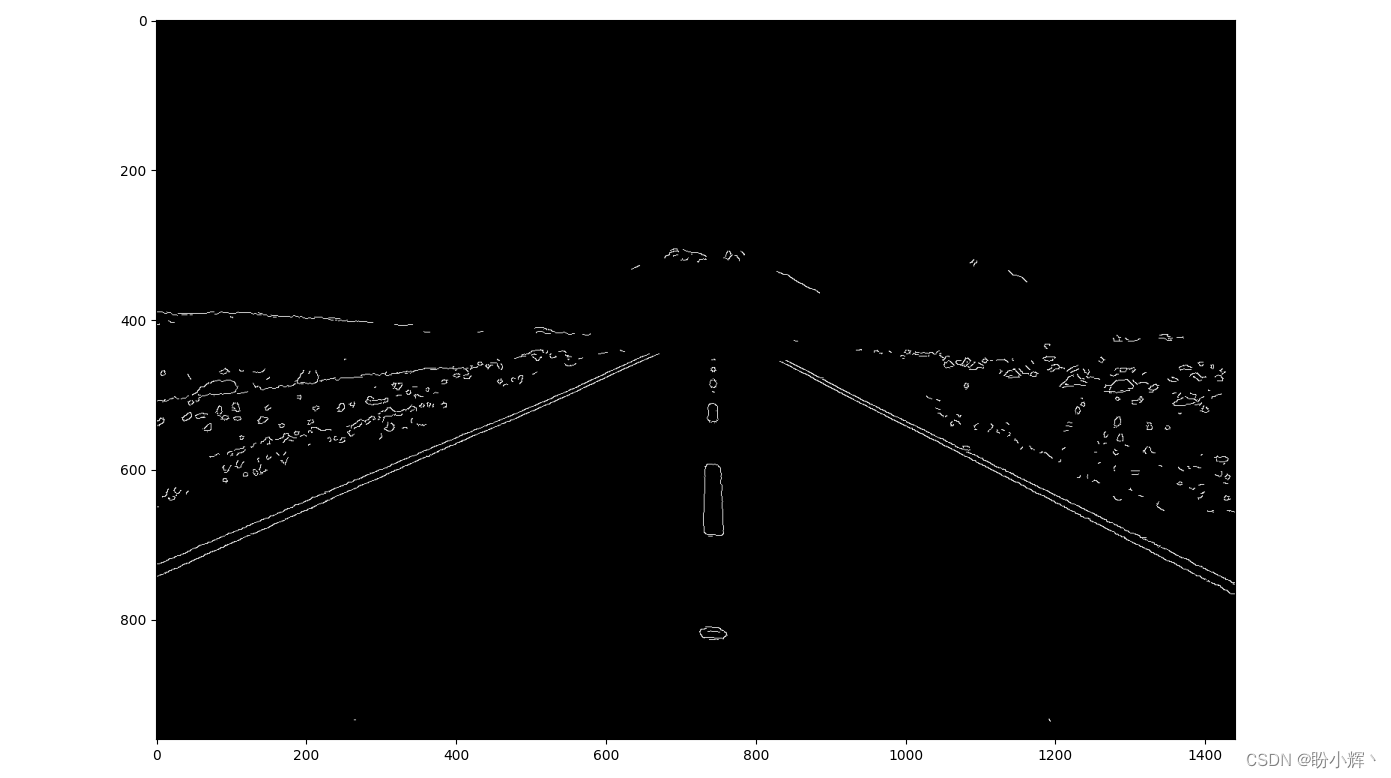
在以上代码中,首先使用 cv2.blur 对原始图像进行模糊处理,以 5 x 5 的窗口为单位,计算窗口内像素值的平均值,并将中心元素替换为周围像素的像素值的平均值。使用 cv2.Canny 方法计算边缘时,值 150 和 200 分别表示边缘所对应的最小和最大可能梯度值。如果一个像素两侧的像素差值较大,则该像素会被识别为边缘。原始图像和模糊图像的边缘如下所示:
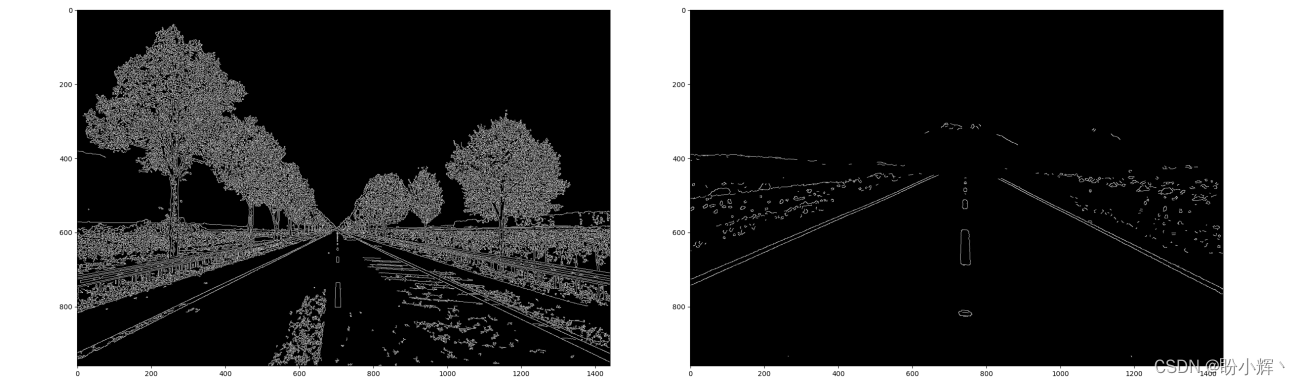
从上图中可以看出,对原始图像进行模糊处理后,边缘会更加清晰合理。识别出边缘后,我们介绍如何使用 HoughLines 技术从图像中提取直线。
(3) 使用 cv2.HoughLines 函数识别长度至少为 100 像素的直线:
python
lines = cv2.HoughLines(edges,1,np.pi/180,150)其中,参数值 100 指定识别直线的长度应至少为 100 像素。得到的每条线都包括与图像左下角的距离和相应的角度,通常用极坐标中的 [rho, theta] 表示。
(4) 绘制检测出的直线:
python
lines = lines[:,0,:]
for rho,theta in lines:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 10000*(-b))
y1 = int(y0 + 10000*(a))
x2 = int(x0 - 10000*(-b))
y2 = int(y0 - 10000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),2)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.imshow(img)
plt.show()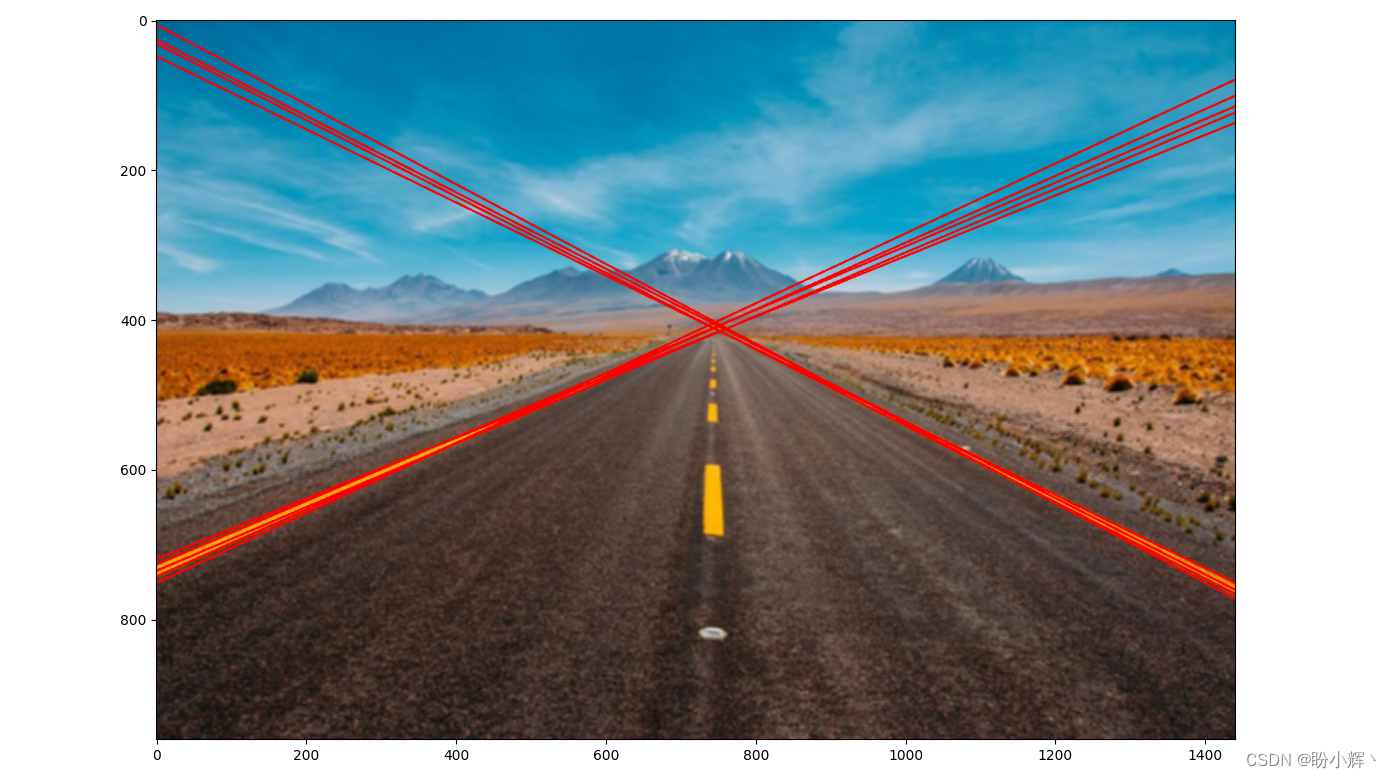
本节中,我们首先通过执行模糊和边缘检测从图像中滤除噪声,得到候选车道像素。然后,使用 HoughLines 进一步过滤掉小于 100 个像素的直线候选。