文章目录
- [错误:E: Unable to locate package ros-noetic-desktop-full](#错误:E: Unable to locate package ros-noetic-desktop-full)
- [错误2:ERROR: cannot download default source list from:](#错误2:ERROR: cannot download default source list from:)
错误:E: Unable to locate package ros-noetic-desktop-full
报错问题
安装ROS时报如下错误:
E: Unable to locate package ros-noetic-desktop-full

报错原因
Ubuntu不同版本对应不同ROS版本
| Ubuntu | ROS |
|---|---|
| Ubuntu 20.04 | noetic |
| Ubuntu18.04 | melodic |
| Ubuntu16.04 | kinetic |
| Ubuntu14.04 | indigo |
解决方法
安装对应的ROS版本,即可解决报错
错误2:ERROR: cannot download default source list from:
报错问题
更新rosdep init时报如下错误

错误原因
raw.githubusercontent.com需要翻墙才能使用
解决办法
- 下载rosdistro
- 修改下载后文件rosdep/source.list.d/20-default.list
将https://raw.githubusercontent.com/ros/rosdistro/master全部替换为file:///home/zhf/Downloads/rosdistro-master

- 修改rosdep源文件下的raw.githubusercontent.com替换为file:///home/zhf/Downloads/rosdistro-master
powershell
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
*
powershell
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
*
powershell
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
*
powershell
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
-
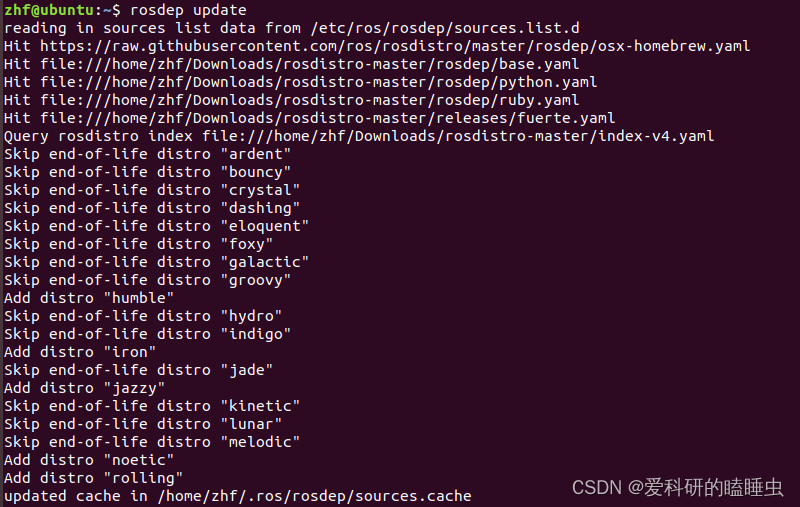
执行
powershellsudo rosdep init rosdep update显示 如下时,配置成功