模型辨识篇
在实际的无人机系统中,控制器的设计至关重要,它直接影响无人机的稳定性和响应能力。然而,要设计出高效、可靠的控制器,首先必须准确理解无人机的动态行为,这就需要通过收集输入输出数据来辨识其运动学模型。运动学模型是描述无人机在空间中运动规律的数学模型,它通常包含了无人机的位置、速度、加速度以及与之相关的控制输入等参数。通过辨识运动学模型,能够理解无人机在受到不同控制输入时的响应方式,这对于控制器设计极为重要。具体来说,这个过程包括以下几个步骤:
-
数据采集:在实际飞行测试中,通过无人机上的传感器收集关于其位置、速度、姿态等的数据,同时记录下相应的控制输入信息,如推力、方向控制等。
-
模型假设:在数据分析之前,需要先建立运动学模型的基本形式。这通常涉及到选择合适的数学结构来描述无人机的运动,如线性模型、非线性模型或是混合模型等。
-
参数辨识:使用统计或机器学习方法,如最小二乘法、神经网络等,根据收集到的数据来估计模型的参数。这一步的目标是找到一组参数,使得模型能够尽可能准确地预测无人机的实际行为。
-
模型验证:通过将模型预测的结果与实际飞行数据进行对比,评估模型的准确性和可靠性。如果模型表现不佳,可能需要返回上一步调整模型结构或参数,或者收集更多数据进行分析。
完成运动学模型的辨识后就可以基于该模型设计控制器。
1.数据采集
期望速度输入:
input_data = [desv_x, desv_y]位置差分得到速度输出:
output_data = np.array([real_x - last_real_x, real_y - last_real_y]) / 0.001其中0.001为采样时间
仿真环境中运动轨迹:
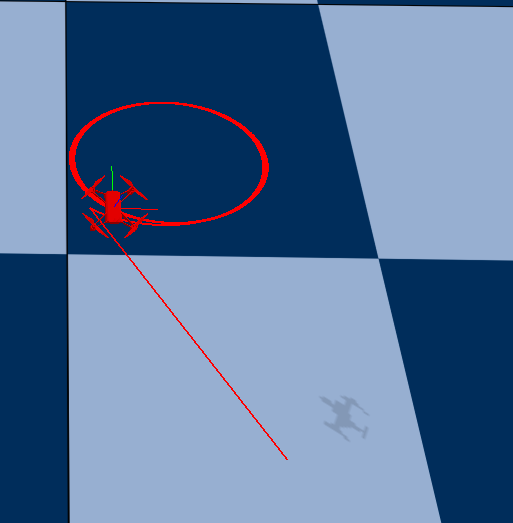
这样得到了无人机的输入输出速度,可进行下一步的模型辨识。
2.模型辨识
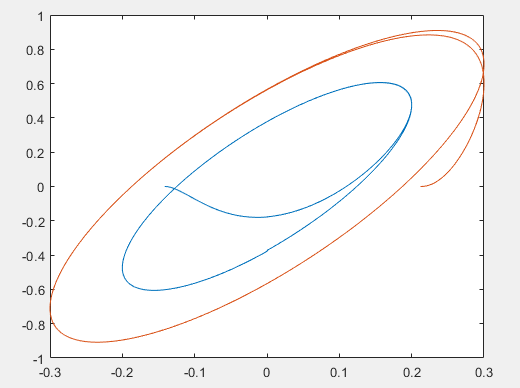
2.1数据查看
将保存的数据导入Matlab,x,y方向的输入输出速度关系如下:
2.2辨识工具箱
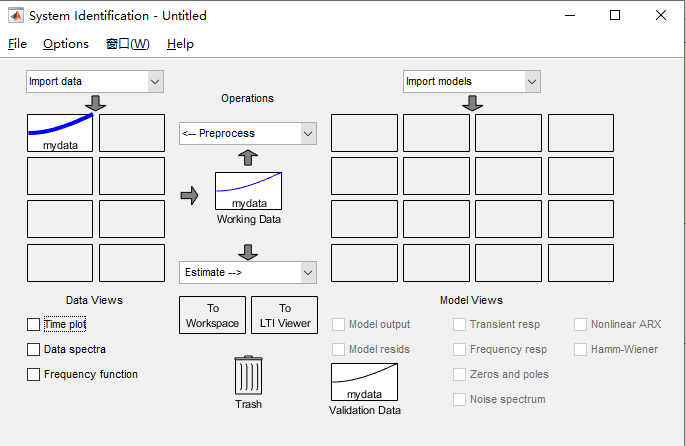
打开系统辨识工具箱:【System ldentification】
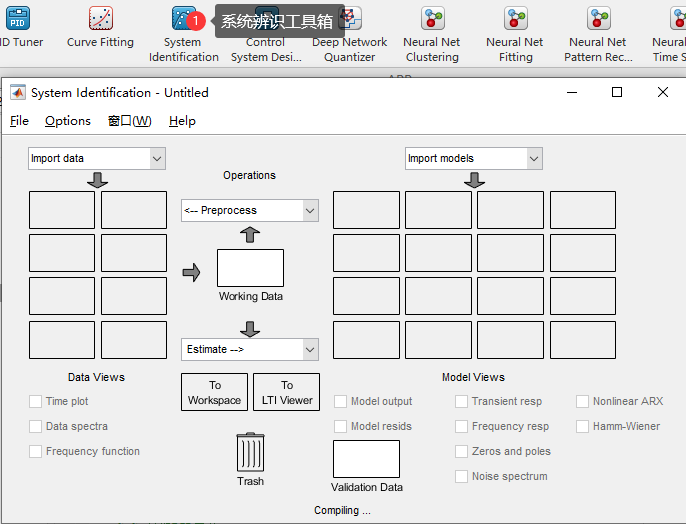
导入数据:选择时域
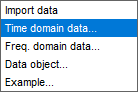
选择要导入的数据名称
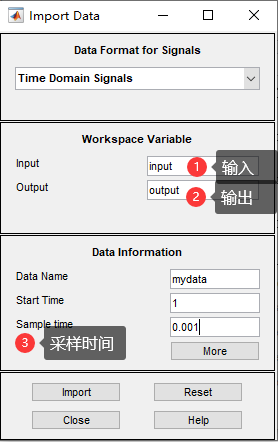
成功导入:
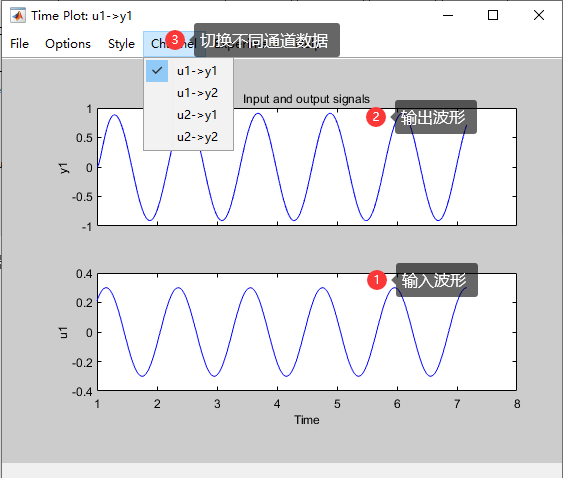
点击Time plot查看导入的数据是否正确:
数据预处理:Matlab系统辨识工具箱提供了一系列数据预处理功能,我们这里选择去均值

- Select channels...:选择数据通道功能允许用户从多通道数据中选择特定的通道进行分析。适用于处理多变量系统时,当用户仅对系统中的部分变量感兴趣或需要排除某些变量的干扰时使用。
- Select experiments...:选择实验功能用于从数据集中选择特定的实验或数据批次进行分析。这在处理包含多个实验条件或批次的数据集时特别有用,允许用户专注于特定条件下的系统行为。
- Merge experiments...:合并实验功能允许用户将来自不同实验或数据批次的数据合并为一个单一数据集。这对于增加数据量以提高系统模型的鲁棒性和泛化能力特别有用。
- Select range...:选择范围功能使用户能够指定数据集中的特定时间范围或数据点范围进行分析。这适用于专注于特定事件或系统响应阶段的分析。
- Remove means:去除均值功能用于从数据中去除平均值,通常用于消除静态偏置或将数据中心化,有助于突出数据的动态变化。
- Remove trends:去除趋势功能用于消除数据中的线性或非线性趋势。这对于处理具有时间相关趋势的数据非常有用,可以帮助揭示系统的内在动态行为。
- Filter...:滤波功能允许用户应用各种滤波器来处理数据,以去除噪声或提取感兴趣的信号频段。这在数据含有高频噪声或需要分析特定频率内容时非常有用。
- Resample...:重采样功能用于改变数据的采样率,通过插值或降采样来适应不同的分析需求。适用于处理采样率不一致的数据或优化处理速度。
- Transform data...:数据转换功能提供了多种数据转换方法,如对数变换、幂律变换等,用于改善数据的统计特性或适应特定的分析方法。
- Quick start:快速开始指南为用户提供了一个简易的操作流程,帮助用户快速开始数据预处理,尤其适用于初学者或需要快速处理数据的场景。
将预处理完成后,需要进行辨识的数据拖入working区域: