目录
一、前言
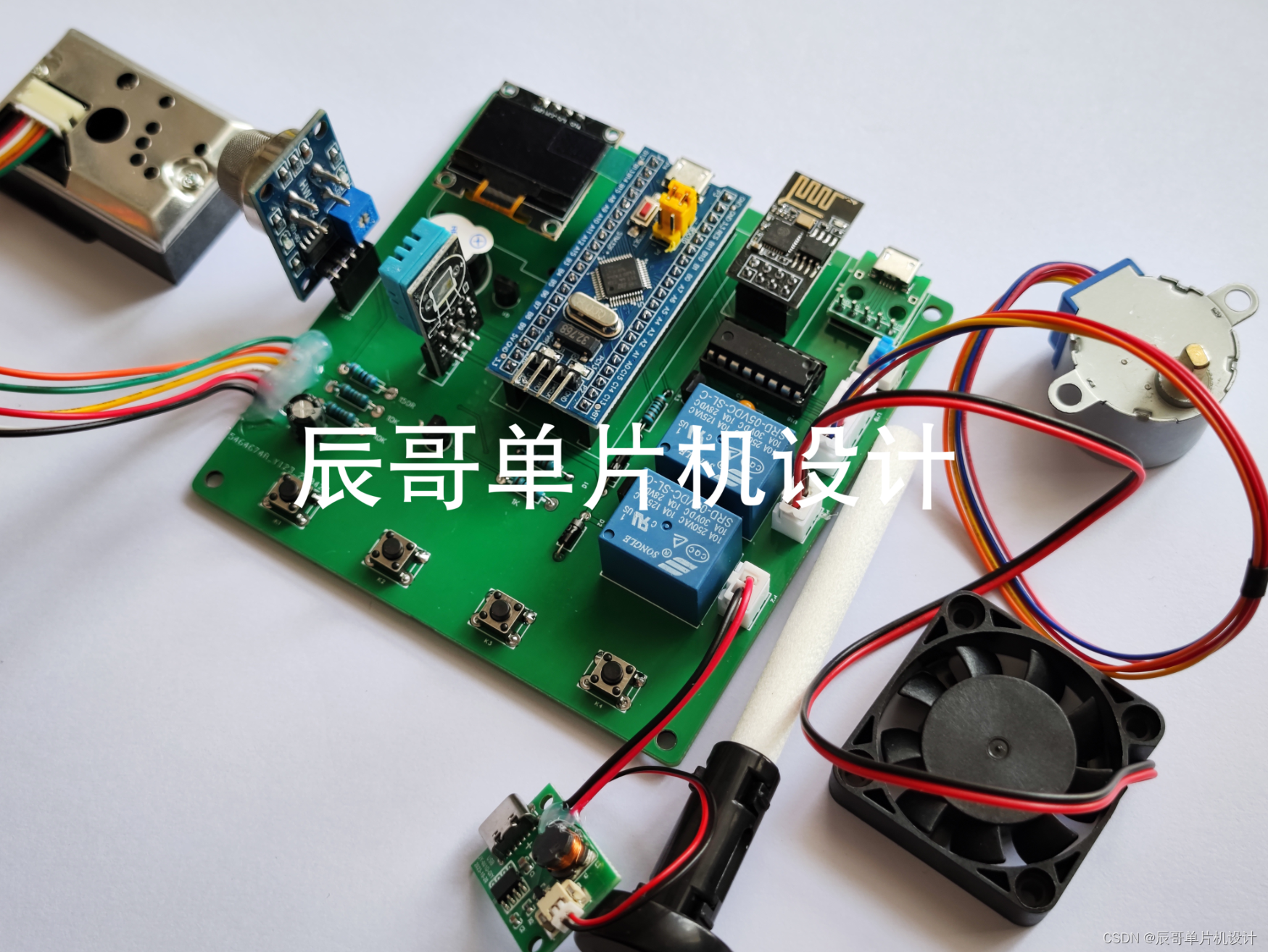
项目成品图片: 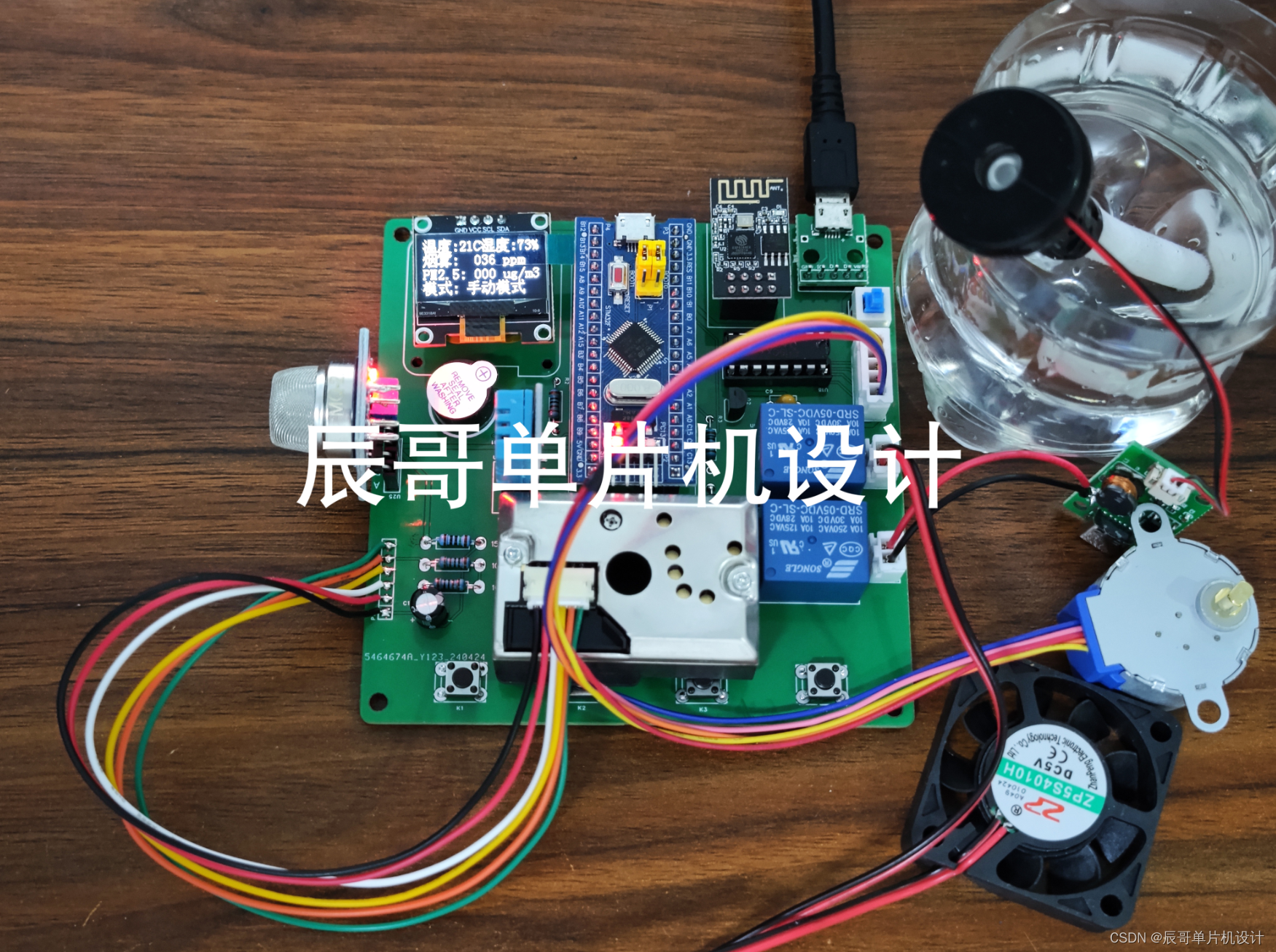
哔哩哔哩视频链接:
(资料分享见文末)
二、项目简介
1.功能详解
基于STM32的家庭环境监测系统。功能如下:
- 温湿度采集:使用DHT11温湿度传感器采集环境温湿度
- 烟雾浓度采集:通过MQ-2烟雾传感器采集环境烟雾浓度
- PM2.5浓度采集:通过粉尘传感器采集环境PM2.5浓度
- 二氧化碳浓度采集:通过CO2气敏传感器检测二氧化碳浓度
- 风扇控制:可自动模式下根据环境温度触发或手动模式下APP开闭
- 加湿器控制:可自动模式下根据环境湿度触发或手动模式下APP开闭
- 窗户:可自动模式下根据PM2.5浓度触发或手动模式下APP开闭
- OLED显示:将检测到的环境数据显示在oled屏幕上。
- 蜂鸣器报警:异常情况下本地蜂鸣器触发报警
- APP功能:使用机智云APP,包括功能有自动模式和手动模式切换,控制并显示风扇、加湿器和窗户状态,查看蜂鸣器报警状态,显示当前环境温湿度、烟雾浓度和PM2,5浓度信息
2.主要器件
- STM32F103C8T6最小系统板
- DHT11温湿度传感器
- OLED显示屏(4针I2C协议)
- WiFi模块(ESP8266-01s)
- MQ-2烟雾浓度传感器
- PM2.5模块
- 28BYJ51步进电机
- 5V风扇模块
- 加湿器模块及驱动板
- 继电器
- 蜂鸣器
- LED灯
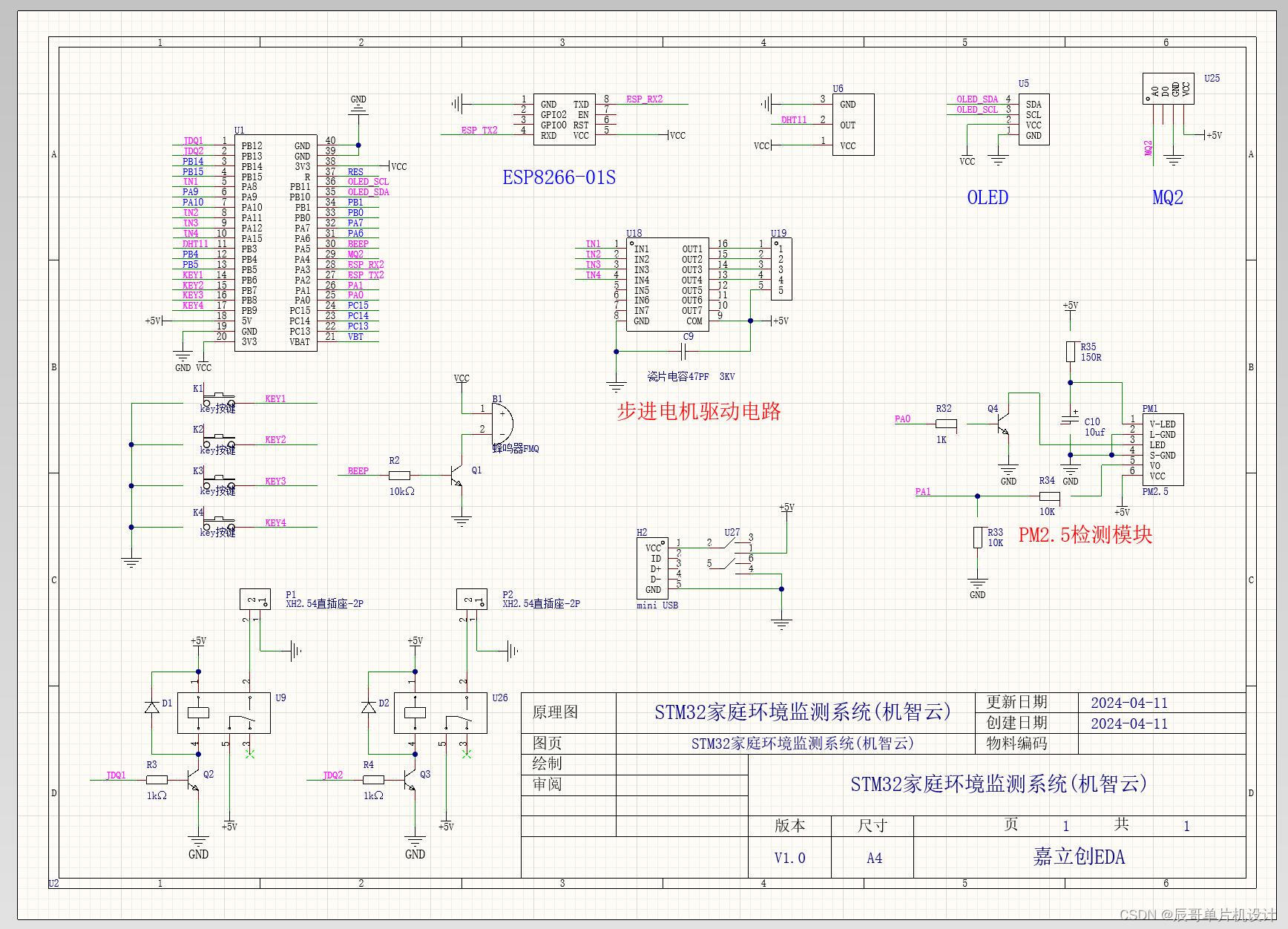
三、原理图设计
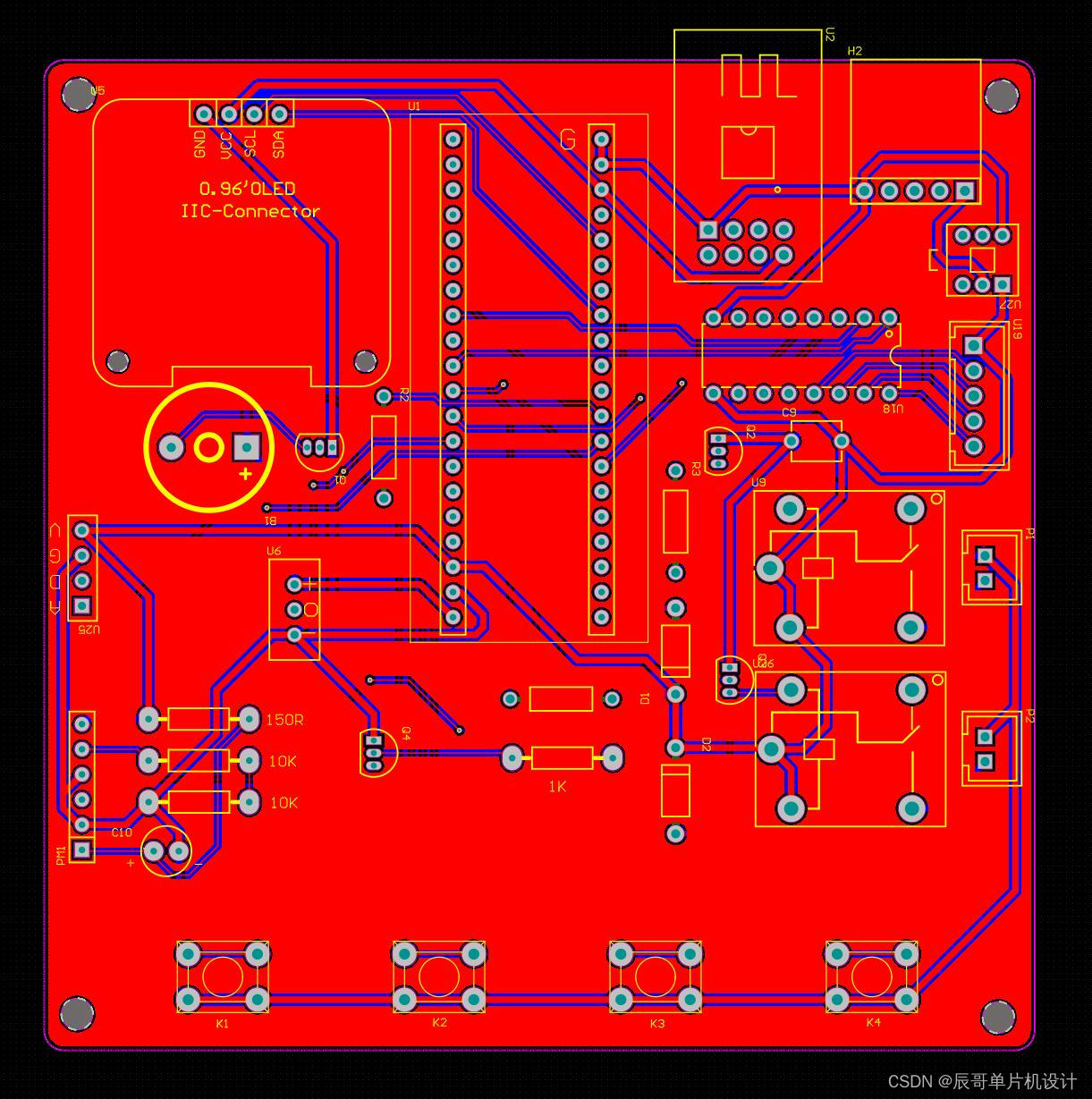
四、PCB硬件设计
1.PCB图
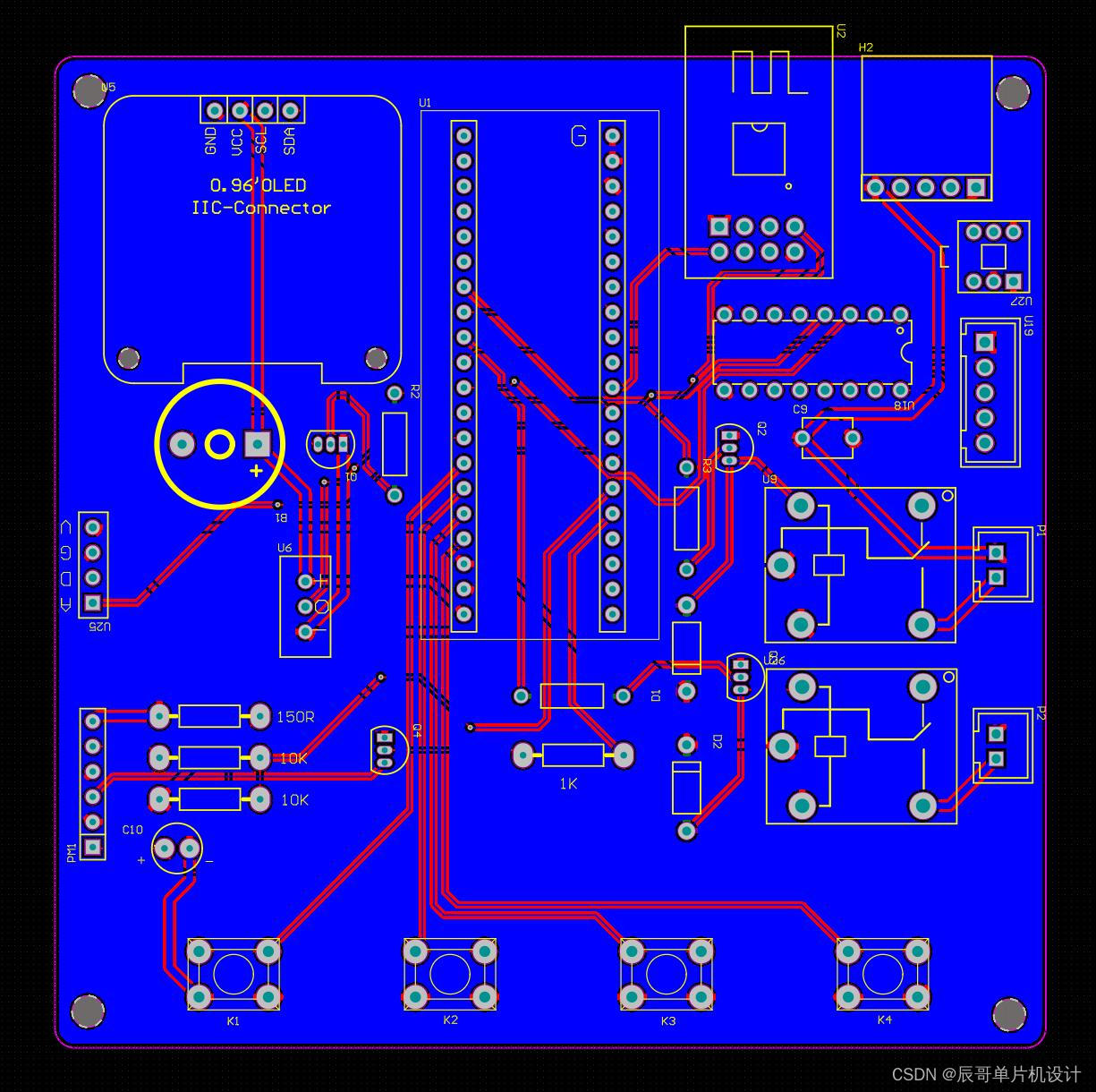
2.PCB板打样焊接图

五、程序设计
cpp
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_Init();
ADCX_Init();
GP2Y_Init();
MQ2_Init();
DHT11_UserConfig();
MOTOR_UserConfig();
Key_Init();
Relay_Init();
Buzzer_Init();
Timer2_Init(9,14398);
uart2_init(9600);
uart1_init(115200);
GENERAL_TIM_Init();
userInit(); //完成机智云初始赋值
gizwitsInit(); //开辟一个环形缓冲区
Delay_ms(500);
gizwitsSetMode(WIFI_AIRLINK_MODE);
IWDG_Init(); //初始化看门狗
while (1)
{
IWDG_ReloadCounter(); //重新加载计数值 喂狗
switch(Menu)
{
case 1:
Menu1();
//判断步进电机是否需要进行旋转
if(Window_Flag_ON == 1)
{
MOTOR_Direction_Angle(1,0,90,1); //顺时针旋转90度
MOTOR_STOP();
Window_Flag_ON = 0;
}
if(Window_Flag_OFF == 1)
{
MOTOR_Direction_Angle(0,0,90,1); //逆时针旋转90度
MOTOR_STOP();
Window_Flag_OFF = 0;
}
break;
case 2:
OLED_Clear();
Menu2();
Menu = 3;
//用于判断阈值数据有没有被更改
old_Temp_value = Temp_value;
old_Humi_value = Humi_value;
old_Smog_value = Smog_value;
old_PM25_value = PM25_value;
break;
case 3:
//显示传感器阈值
OLED_ShowNum(1,13,Temp_value,2);
OLED_ShowNum(2,13,Humi_value,2);
OLED_ShowNum(3,13,Smog_value,4);
OLED_ShowNum(4,13,PM25_value,4);
//进行阈值选择
if(KeyNum == 1)
{
KeyNum = 0;
value_Option_Num++;
if(value_Option_Num > 4)
{
value_Option_Num = 1;
}
}
//显示选择标识符">"
OLED_Option(value_Option_Num);
//检测阈值数值的调节
switch(value_Option_Num)
{
case 1:
if(KeyNum == 3)
{
KeyNum = 0;
Temp_value++;
if(Temp_value >= 100)
{
Temp_value = 1;
}
}
if(KeyNum == 4)
{
KeyNum = 0;
Temp_value--;
if(Temp_value >= 100)
{
Temp_value = 99;
}
}
break;
case 2:
if(KeyNum == 3)
{
KeyNum = 0;
Humi_value++;
if(Humi_value >= 100)
{
Humi_value = 1;
}
}
if(KeyNum == 4)
{
KeyNum = 0;
Humi_value--;
if(Humi_value >= 100)
{
Humi_value = 99;
}
}
break;
case 3:
if(KeyNum == 3)
{
KeyNum = 0;
Smog_value++;
if(Smog_value >= 501)
{
Smog_value = 1;
}
}
if(KeyNum == 4)
{
KeyNum = 0;
Smog_value--;
if(Smog_value >= 5001)
{
Smog_value = 500;
}
}
break;
case 4:
if(KeyNum == 3)
{
KeyNum = 0;
PM25_value++;
if(PM25_value >= 501)
{
PM25_value = 1;
}
}
if(KeyNum == 4)
{
KeyNum = 0;
PM25_value--;
if(PM25_value >= 501)
{
PM25_value = 500;
}
}
break;
}
//退出阈值设置界面
if(KeyNum == 2)
{
KeyNum = 0;
//当阈值数据被更改后,才会写入FLASH中
if((old_Temp_value != Temp_value) || (old_Humi_value != Humi_value) || (old_Smog_value != Smog_value) || (old_PM25_value != PM25_value))
{
//写入传感器阈值数据
FLASH_W(FLASH_START_ADDR,Temp_value,Humi_value,Smog_value,PM25_value);
}
Menu = 1; //回到主菜单
OLED_Clear(); //清屏
}
break;
}
userHandle(); //更新机智云数据点变量存储的值
gizwitsHandle((dataPoint_t *)¤tDataPoint); //数据上传至机智云
}
}六、实验效果

七、资料内容
