第一篇先介绍材料准备、环境配置和ros的安装
1.材料准备
1.树莓派4b,8g版本
2.arduino mega
3.MG310编码电机*2
4.雷达ydlidar X3
5.Tb6612电机驱动板
6.12v电池
7.ubuntu18.04+ros melodic版本
2.环境配置
树莓派安装ubuntu18.04版本
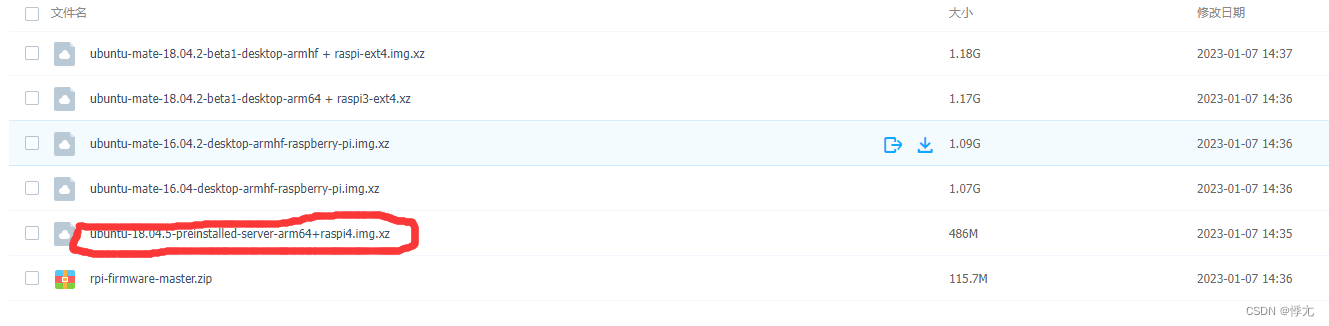
ubuntu18.04版本的镜像可以到官网下载,需要注意的是虚拟机使用的镜像后缀是.iso,树莓派使用的镜像是.img
下载链接: https://pan.baidu.com/s/1uEpgTqhBcbfkRSCyFHRXkQ?pwd=6666提取码:6666
然后使用树莓派镜像烧录器
下载地址:https://www.raspberrypi.com/software/

这里注意检查烧录的镜像后缀是不是.img

然后配置一下自己的网络,点击烧录
烧录完成后,做进一步配置。
添加启动文件,修改网络密码
烧写完系统后,打开boot文件夹,network-config,这个是烧好ubuntu系统之后自带的网络配置文件,只需要将阴影部分(图中15-21行)的注释去掉,并填入你自己的wifi信息,保存即可。
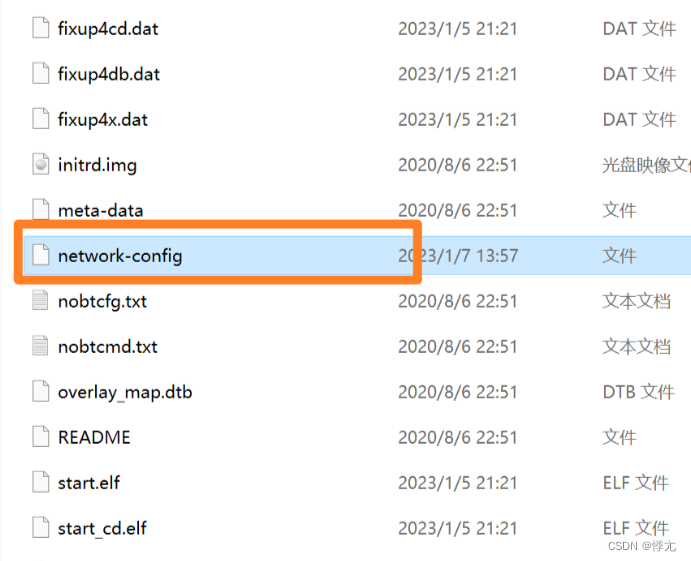
修改network-config文件
这里有两点需要注意:
1.在填写wifi名的时候,如果你的wifi名中没有空格,在填写时不要加双引号
只有当你的wifi名中有空格,才需要加双引号
2.注意一下每行之间的缩进,需要缩进时是两个空格,不要用Tab代替
保存后把内存卡插到树莓派板子上,即可在热点或者路由器后台中看到多了一个设备
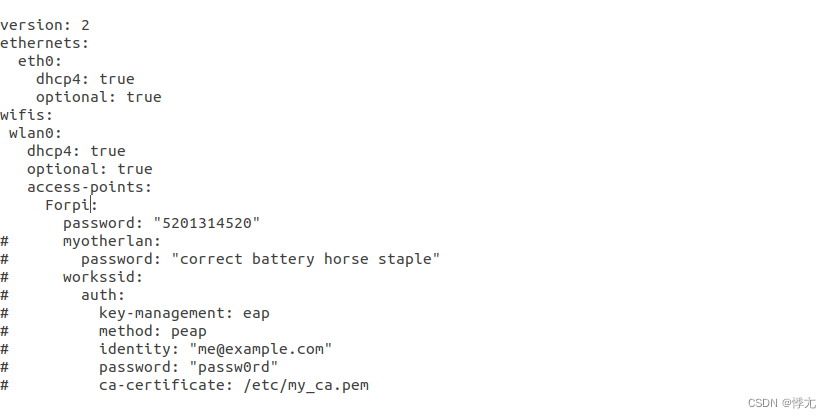
复制一下代码,修改成自己的wifi名称和密码
xml
version: 2
ethernets:
eth0:
dhcp4: true
optional: true
wifis:
wlan0:
dhcp4: true #注意冒号后面需要带有空格
optional: true
access-points:
Forpi:#修改成自己的wifi名称
password: "5201314520"#修改成自己的wifi密码
# myotherlan:
# password: "correct battery horse staple"
# workssid:
# auth:
# key-management: eap
# method: peap
# identity: "me@example.com"
# password: "passw0rd"
# ca-certificate: /etc/my_ca.pem设置好之后重启树莓派就可以连接wifi了
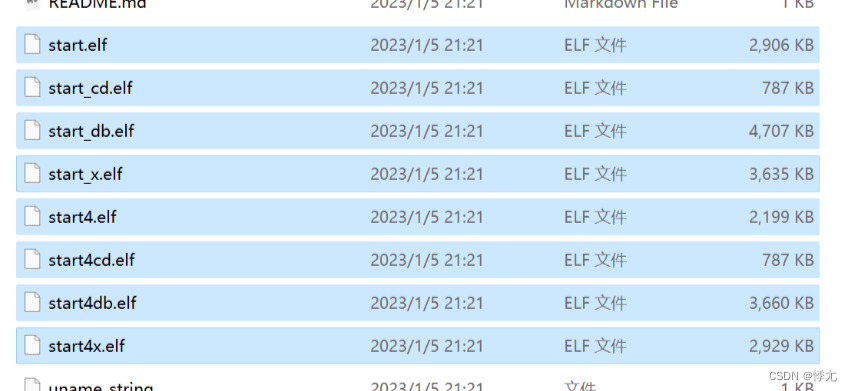
如果在启动树莓派时遇到下面的报错提示,表示缺少启动文件
xml
$ start4.elf: is not compatible
$ This board requires newer software需要在github上面下载最新的启动文件来替换旧的启动文件
地址:https://github.com/raspberrypi/rpi-firmware
把下图 .dat和 .elf 共16个文件复制替换掉TF卡上面的文件即可。
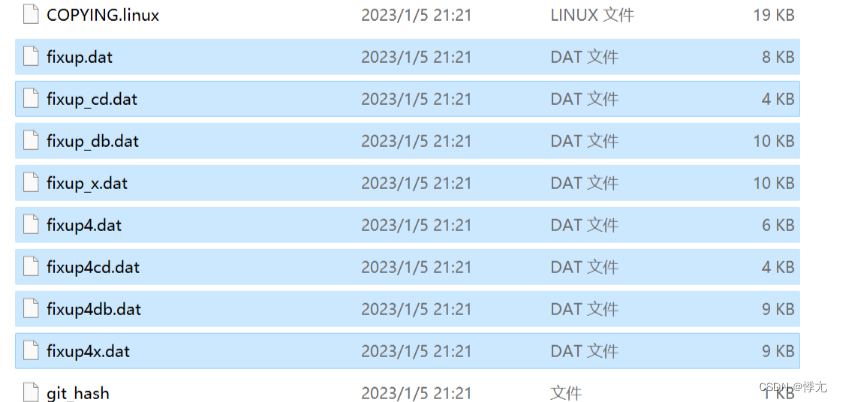
然后重启树莓派
安装ubuntu桌面
使用ROS的rviz, gazebo等仿真工具,需要桌面图形环境。
bash
sudo apt-get upgrade安装ubuntu桌面
bash
sudo apt-get install ubuntu-desktop关机重启就完成了
bash
sudo reboot下一步进行安装ROS
我们使用鱼香ros的一键安装ros
bash
wget http://fishros.com/install -O fishros && . fishros按照提示,建议先更换国内镜像源。
然后进行测试
打开终端输入
bash
roscore
有这个提示就表示安装成功了
测试一个经典案例,键盘控制小乌龟移动
打开一个终端启动小乌龟节点
bash
rosrun turtlesim turtlesim_node再打开一个终端,启动键盘控制节点
bash
rosrun turtlesim turtle_teleop_key能看到小乌龟就表示运行成功了