目录
[2.2 完整代码](#2.2 完整代码)
一、概述
在 Open3D 中,通过索引提取点云是一种常见且有效的操作,特别适用于需要处理点云子集的场景,例如提取特定区域的点、降采样、或者进行其他的后续处理。Open3D 提供了 select_by_index 方法来根据索引提取点云的子集。这个方法可以接受一个整数索引的列表,根据列表中的索引值提取对应的点云部分。
二、代码实现
2.1关键函数
Open3D中的select_by_index()使用二进制掩码只输出选定的点或非选定的点。
- inlier_cloud = cloud.select_by_index(m_ind)提取索引对应的点;
- outlier_cloud = cloud.select_by_index(m_ind, invert=True)提取索引之外的点。
python
def select_by_index(self, indices, invert=False): # real signature unknown; restored from __doc__
"""
select_by_index(self, indices, invert=False)
Function to select points from input pointcloud into output pointcloud.
Args:
indices (List[int]): Indices of points to be selected.
invert (bool, optional, default=False): Set to ``True`` to invert the selection of indices.
Returns:
open3d.cpu.pybind.geometry.PointCloud
"""注意事项
- 索引范围:确保索引列表中的值在点云中存在对应的点。否则,会导致错误或空的子集。
- 灵活性:可以根据需要生成任意数量和类型的索引,例如提取连续的点、随机选择的点或者基于特定条件的点。
2.2 完整代码
python
import open3d as o3d
import numpy as np
# 加载点云数据
pcd = o3d.io.read_point_cloud("bunny.pcd")
# 可视化原始点云
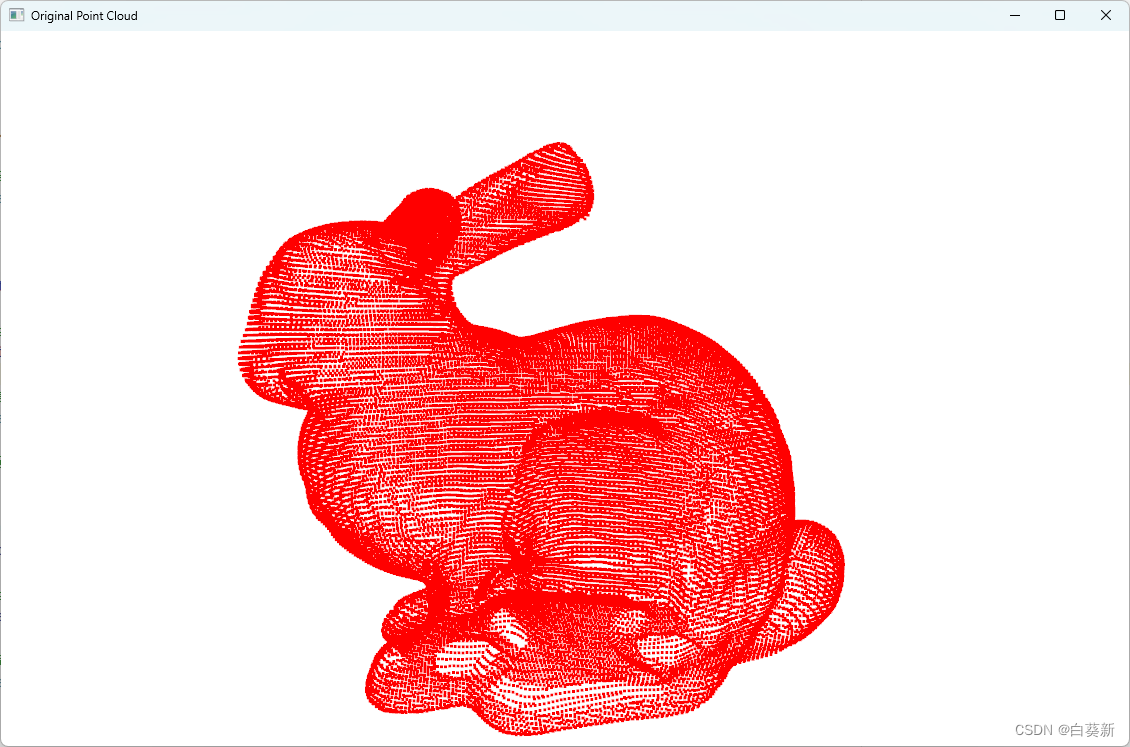
o3d.visualization.draw_geometries([pcd], window_name='Original Point Cloud')
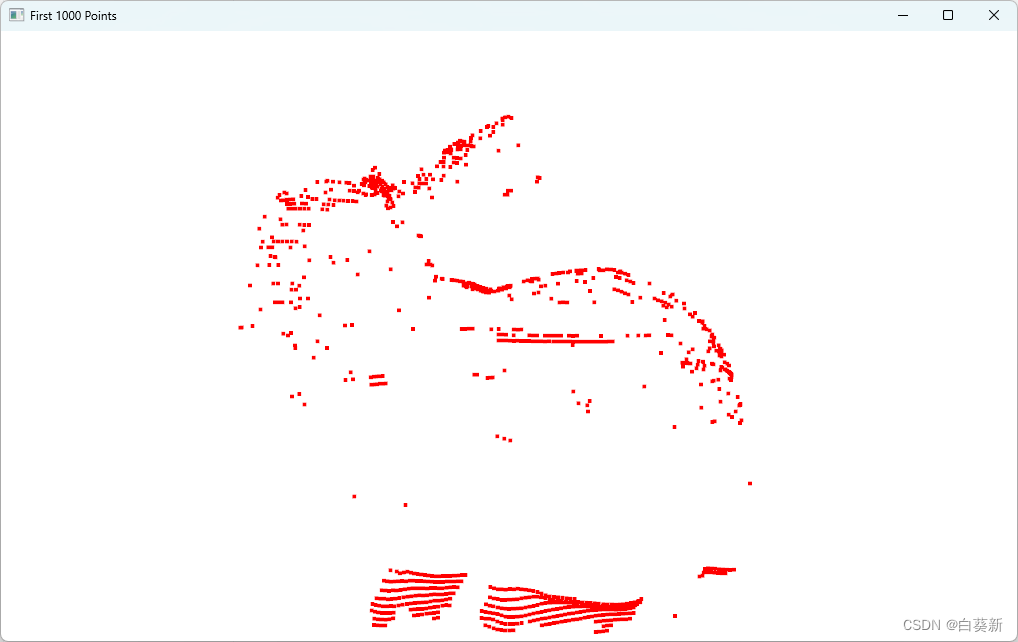
# 生成前1000个点的索引
num_points = 1000
indices_first_1000 = list(range(num_points))
# 使用索引提取点云子集
subset_pcd_first_1000 = pcd.select_by_index(indices_first_1000)
# 可视化提取的前1000个点
o3d.visualization.draw_geometries([subset_pcd_first_1000], window_name='First 1000 Points')
# 获取点云中的所有点数
total_points = len(pcd.points)
# 随机选择1000个点的索引
indices_random_1000 = np.random.choice(total_points, num_points, replace=False)
# 使用索引提取点云子集
subset_pcd_random_1000 = pcd.select_by_index(indices_random_1000)
# 可视化提取的随机1000个点
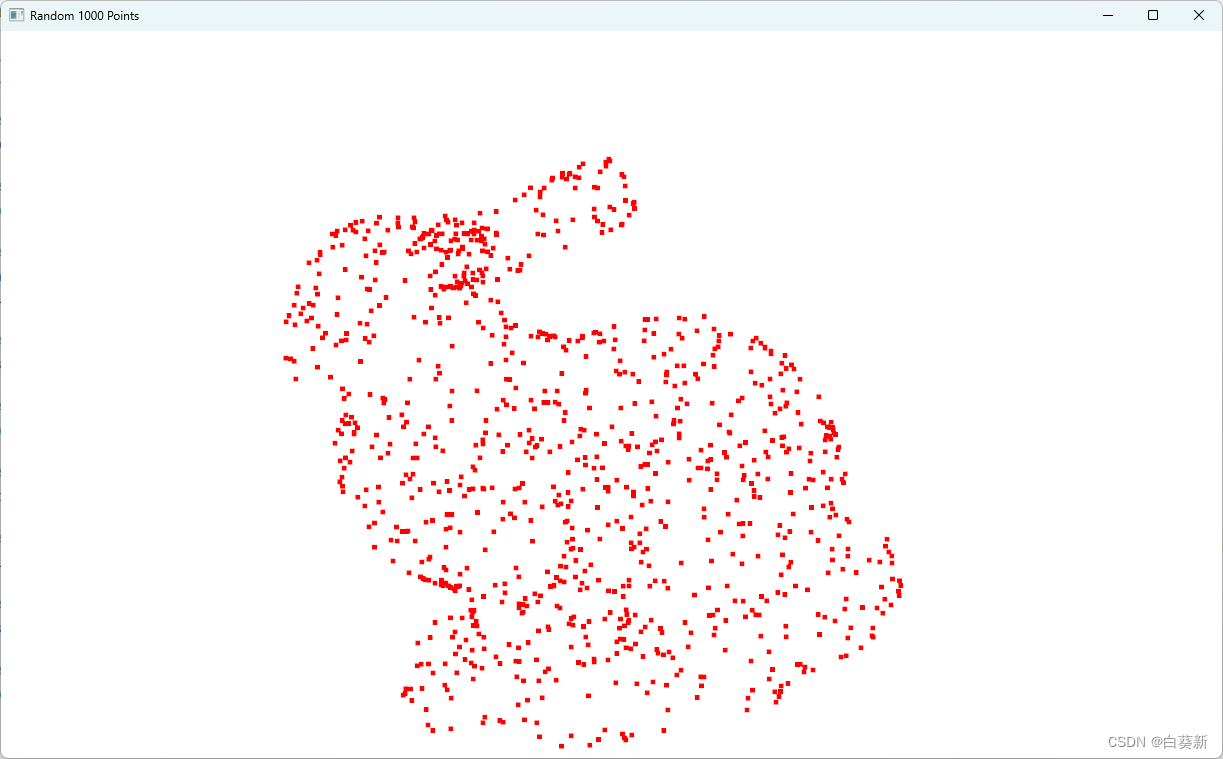
o3d.visualization.draw_geometries([subset_pcd_random_1000], window_name='Random 1000 Points')三、实现效果
3.1原始点云
3.2提取后点云
前1000个点
随机提取的1000个点