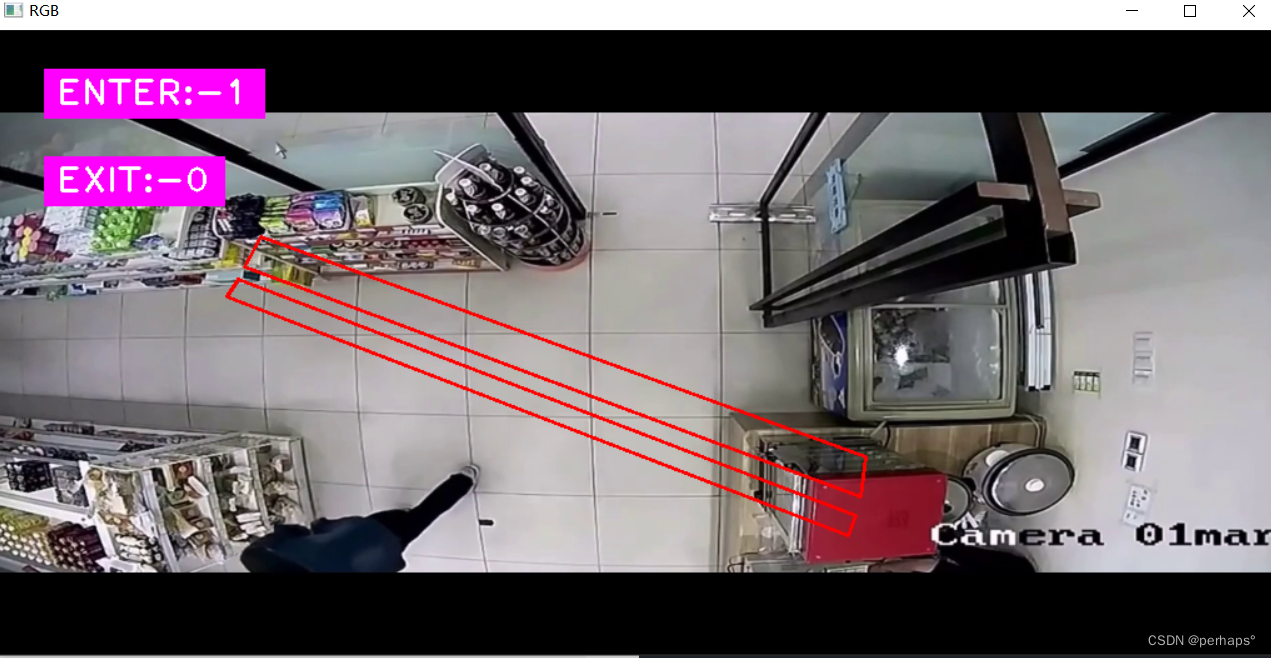
门店客流统计
代码部分
c
import cv2
import numpy as np
from tracker import *
import cvzone
import time
bg_subtractor = cv2.createBackgroundSubtractorMOG2(history=200, varThreshold=140)
# Open a video capture
video_capture = cv2.VideoCapture(r"store.mp4")
def RGB(event, x, y, flags, param):
if event == cv2.EVENT_MOUSEMOVE:
point = [x, y]
print(point)
cv2.namedWindow('RGB')
cv2.setMouseCallback('RGB', RGB)
tracker = Tracker()
area1 = [(213, 165), (200, 189), (693, 373), (697, 341)]
area2 = [(195, 199), (186, 213), (683, 404), (689, 388)]
er = {}
counter1 = []
ex = {}
counter2 = []
while True:
ret, frame = video_capture.read()
if not ret:
break
frame = cv2.resize(frame, (1028, 500))
mask = bg_subtractor.apply(frame)
_, mask = cv2.threshold(mask, 245, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
list = []
for cnt in contours:
area = cv2.contourArea(cnt)
if area > 1500:
# cv2.drawContours(frame, [cnt], -1, (0, 255, 0), 2)
x, y, w, h = cv2.boundingRect(cnt)
list.append([x, y, w, h])
bbox_idx = tracker.update(list)
for bbox in bbox_idx:
x1, y1, x2, y2, id = bbox
cx = int(x1 + x1 + x2) // 2
cy = int(y1 + y1 + y2) // 2
result = cv2.pointPolygonTest(np.array(area1, np.int32), ((cx, cy)), False)
if result >= 0:
er[id] = (cx, cy)
if id in er:
result1 = cv2.pointPolygonTest(np.array(area2, np.int32), ((cx, cy)), False)
if result1 >= 0:
cv2.rectangle(frame, (x1, y1), (x2 + x1, y2 + y1), (0, 255, 0), 3)
cvzone.putTextRect(frame, f'{id}', (cx, cy), 2, 2)
cv2.circle(frame, (cx, cy), 5, (0, 255, 0), -1)
if counter1.count(id) == 0:
counter1.append(id)
result2 = cv2.pointPolygonTest(np.array(area2, np.int32), ((cx, cy)), False)
if result2 >= 0:
ex[id] = (cx, cy)
if id in ex:
result3 = cv2.pointPolygonTest(np.array(area1, np.int32), ((cx, cy)), False)
if result3 >= 0:
cv2.rectangle(frame, (x1, y1), (x2 + x1, y2 + y1), (0, 0, 255), 3)
cvzone.putTextRect(frame, f'{id}', (cx, cy), 2, 2)
cv2.circle(frame, (cx, cy), 5, (0, 255, 0), -1)
if counter2.count(id) == 0:
counter2.append(id)
cv2.polylines(frame, [np.array(area1, np.int32)], True, (0, 0, 255), 2)
cv2.polylines(frame, [np.array(area2, np.int32)], True, (0, 0, 255), 2)
Enter = len(counter1)
Exit = len(counter2)
cvzone.putTextRect(frame, f'ENTER:-{Enter}', (50, 60), 2, 2)
cvzone.putTextRect(frame, f'EXIT:-{Exit}', (50, 130), 2, 2)
cv2.imshow('RGB', frame)
time.sleep(0.01)
if cv2.waitKey(1) & 0xFF == 27: # Press 'Esc' to exit
break
# Release the video capture and close windows
video_capture.release()
cv2.destroyAllWindows()
c
import math
class Tracker:
def __init__(self):
# Store the center positions of the objects
self.center_points = {}
# Keep the count of the IDs
# each time a new object id detected, the count will increase by one
self.id_count = 0
def update(self, objects_rect):
# Objects boxes and ids
objects_bbs_ids = []
# Get center point of new object
for rect in objects_rect:
x, y, w, h = rect
cx = (x + x + w) // 2
cy = (y + y + h) // 2
# Find out if that object was detected already
same_object_detected = False
for id, pt in self.center_points.items():
dist = math.hypot(cx - pt[0], cy - pt[1])
if dist < 35:
self.center_points[id] = (cx, cy)
# print(self.center_points)
objects_bbs_ids.append([x, y, w, h, id])
same_object_detected = True
break
# New object is detected we assign the ID to that object
if same_object_detected is False:
self.center_points[self.id_count] = (cx, cy)
objects_bbs_ids.append([x, y, w, h, self.id_count])
self.id_count += 1
# Clean the dictionary by center points to remove IDS not used anymore
new_center_points = {}
for obj_bb_id in objects_bbs_ids:
_, _, _, _, object_id = obj_bb_id
center = self.center_points[object_id]
new_center_points[object_id] = center
# Update dictionary with IDs not used removed
self.center_points = new_center_points.copy()
return objects_bbs_ids效果