CMSIS 2.0 接口中的 Semaphore(信号量)是用于嵌入式系统中多线程或中断服务例程(ISR)之间同步和共享资源保护的重要机制。Semaphore 是一种用于控制对多个共享资源访问的同步机制。它可以被看作是一个计数器,用于跟踪可用资源的数量。
特性
计数信号量:Semaphore 可以作为计数信号量使用,管理多个相同类型的资源。例如,如果有多个 DMA 通道,可以使用 Semaphore 来限制同时访问这些通道的数量。
生产者/消费者信号量:Semaphore 也可以用于实现生产者和消费者之间的同步,确保在消费者准备好之前,生产者不会覆盖数据。
Semaphore在并发编程中确实可以作为一种锁来使用,用于控制多个线程对共享资源的访问。首先,你需要确定在任意时刻能够同时访问共享资源的最大线程数,并将这个数作为初始值来创建一个Semaphore对象。这个初始值通常表示许可的数量,每个许可允许一个线程访问共享资源。当线程想要访问共享资源时,它应该首先调用Semaphore对象的osSemaphoreAcquire()方法。这个方法会尝试从Semaphore中获取一个许可。如果Semaphore中有可用的许可(即计数器的值大于0),那么线程会立即获取一个许可并继续执行。如果没有可用的许可(即计数器的值为0),那么线程将被阻塞,直到有可用的许可。一旦线程成功获取到许可,它就可以安全地访问共享资源了。在访问期间,线程可以执行任何需要的操作。当线程完成对共享资源的访问后,它应该调用Semaphore对象的osSemaphoreRelease()方法来释放之前获取的许可。这个方法会将Semaphore的计数器加1,表示有一个新的许可可用。其他等待的线程(如果有的话)现在可能会获取到这个许可并继续执行。
Semaphore API
|---------------------|--------------------------------|
| API名称 | 说明 |
| osSemaphoreNew | 创建并初始化一个信号量 |
| osSemaphoreGetName | 获取一个信号量的名字 |
| osSemaphoreAcquire | 获取一个信号量的令牌,若获取不到,则会超时返回 |
| osSemaphoreRelease | 释放一个信号量的令牌,但是令牌的数量不超过初始定义的的令牌数 |
| osSemaphoreGetCount | 获取当前的信号量令牌数 |
| osSemaphoreDelete | 删除一个信号量 |
代码编写
修改D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\BUILD.gn文件
# Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import("//build/lite/config/component/lite_component.gni")
lite_component("demo") {
features = [
#"base_00_helloworld:base_helloworld_example",
#"base_01_led:base_led_example",
#"base_02_loopkey:base_loopkey_example",
#"base_03_irqkey:base_irqkey_example",
#"base_04_adc:base_adc_example",
#"base_05_pwm:base_pwm_example",
#"base_06_ssd1306:base_ssd1306_example",
#"kernel_01_task:kernel_task_example",
#"kernel_02_timer:kernel_timer_example",
#"kernel_03_event:kernel_event_example",
#"kernel_04_mutex:kernel_mutex_example",
"kernel_05_semaphore_as_mutex:kernel_semaphore_as_mutex_example",
]
}创建D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\kernel_05_semaphore_as_mutex文件夹
文件夹中创建D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\kernel_05_semaphore_as_mutex\kernel_semaphore_as_mutex_example.c文件D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\kernel_05_semaphore_as_mutex\BUILD.gn文件
# Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
static_library("kernel_semaphore_as_mutex_example") {
sources = [
"kernel_semaphore_as_mutex_example.c"
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/kal/cmsis",
]
}
/*
* Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#include <stdio.h>
#include <unistd.h>
#include "ohos_init.h"
#include "cmsis_os2.h"
osThreadId_t Task1_ID; // 任务1 ID
osThreadId_t Task2_ID; // 任务2 ID
osSemaphoreId_t Semaphore_ID; // 信号量ID
uint8_t buff[20] = {0}; // 定义一个共享资源
#define TASK_STACK_SIZE 1024
#define TASK_DELAY_TIME 1 // s
/**
* @description: 任务1
* @param {*}
* @return {*}
*/
void Task1(void)
{
int i = 0;
while (1) {
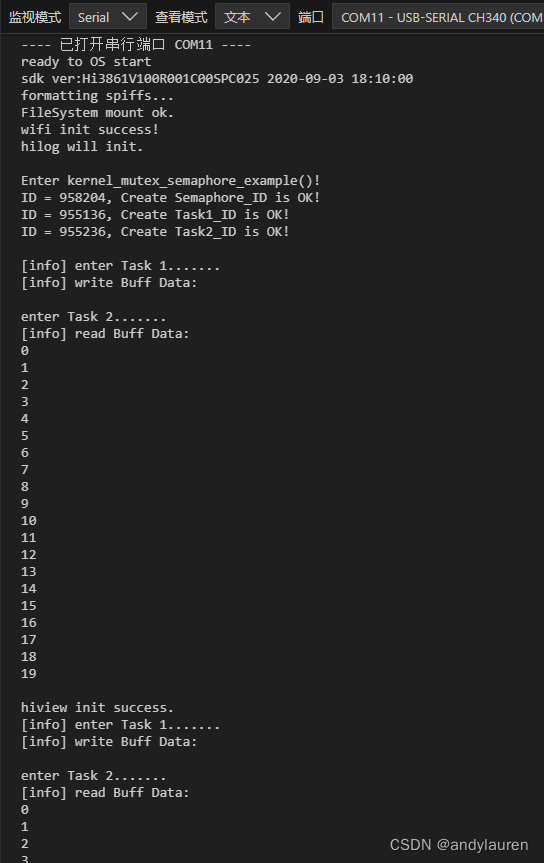
printf("[info] enter Task 1.......\n");
osSemaphoreAcquire(Semaphore_ID, osWaitForever); // 请求信号量 -1
// 操作共享数据 写数据
printf("[info] write Buff Data: \n");
for (i = 0; i < sizeof(buff); i++) {
buff[i] = i;
}
printf("\n");
osSemaphoreRelease(Semaphore_ID); // 释放信号量 +1
sleep(TASK_DELAY_TIME);
}
}
/**
* @description: 任务2
* @param {*}
* @return {*}
*/
void Task2(void)
{
int i = 0;
while (1) {
printf("enter Task 2.......\n");
osSemaphoreAcquire(Semaphore_ID, osWaitForever); // 请求信号量 -1
// 操作共享数据 读数据
printf("[info] read Buff Data: \n");
for (i = 0; i < sizeof(buff); i++) {
printf("%d \n", buff[i]);
}
printf("\n");
osSemaphoreRelease(Semaphore_ID); // 释放信号量 +1
sleep(TASK_DELAY_TIME);
}
}
/**
* @description: 初始化并创建任务
* @param {*}
* @return {*}
*/
static void kernel_mutex_semaphore_example(void)
{
printf("Enter kernel_mutex_semaphore_example()!\n");
// 创建信号量
Semaphore_ID = osSemaphoreNew(1, 1, NULL); // 参数: 最大计数值,初始计数值,参数配置
if (Semaphore_ID != NULL) {
printf("ID = %d, Create Semaphore_ID is OK!\n", Semaphore_ID);
}
osThreadAttr_t taskOptions;
taskOptions.name = "Task1"; // 任务的名字
taskOptions.attr_bits = 0; // 属性位
taskOptions.cb_mem = NULL; // 堆空间地址
taskOptions.cb_size = 0; // 堆空间大小
taskOptions.stack_mem = NULL; // 栈空间地址
taskOptions.stack_size = TASK_STACK_SIZE; // 栈空间大小 单位:字节
taskOptions.priority = osPriorityNormal; // 任务的优先级
Task1_ID = osThreadNew((osThreadFunc_t)Task1, NULL, &taskOptions); // 创建任务1
if (Task1_ID != NULL) {
printf("ID = %d, Create Task1_ID is OK!\n", Task1_ID);
}
taskOptions.name = "Task2"; // 任务的名字
taskOptions.priority = osPriorityNormal; // 任务的优先级
Task2_ID = osThreadNew((osThreadFunc_t)Task2, NULL, &taskOptions); // 创建任务2
if (Task2_ID != NULL) {
printf("ID = %d, Create Task2_ID is OK!\n", Task2_ID);
}
}
SYS_RUN(kernel_mutex_semaphore_example);使用build,编译成功后,使用upload进行烧录。