2024/6/23:
前段时间有幸完成了大学期间的第一篇论文。在面试之前复盘一下关于自己论文中DQN的一些相关点。
浅谈主要区别(在线 or 离线)

首先,一切的开始是强化学习中时序差分方程,这体现了强化学习方法的优化策略。在看方程之前,先要理解Q值的概念------即当前状态S下采取动作A继续下去能够得到的最佳收益。
该方程通过Target值 (采取当前动作后得到的奖励 + 采取动作后下一个状态根据某个策略选取动作的Q值)减去估计值 (当前估计的当前状态采取A的Q值)再乘上一个类似于学习率的量来更新当前估计的当前状态的Q值,而方程的目的就是来逼近真正的最佳收益。可能有点绕,但是从类似于动态规划的角度看会明白一点。
下面是on-policy和off-policy策略的区别:
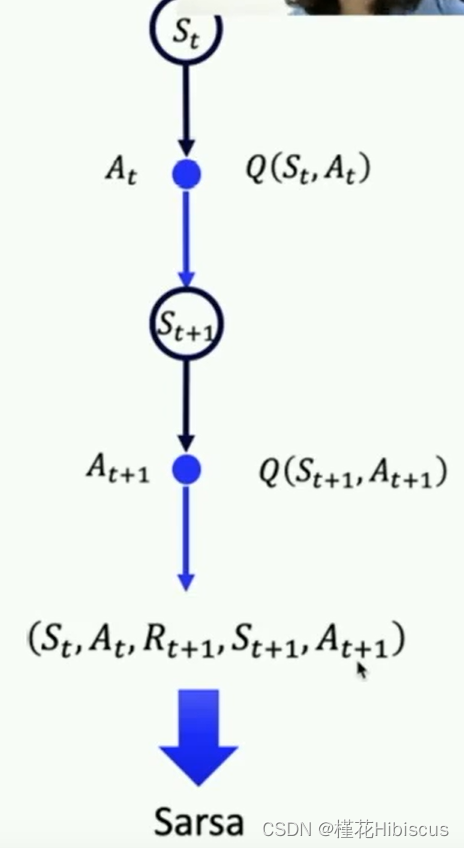
这两种策略本质上的区别是他们的时序差分方程,如下图所示,上面的target属于on-policy方法,下面的属于off-policy方法:

on-policy 主要应用于Sarsa方法,是一种在线的交互式的学习方法,大概就像是。采取这种策略的方法通过当前状态下选取的一定会执行的action来优化自身的Q表格。action的选取可以通过随机选取,也可以根据贪婪策略选取,然后根据这个选取的action计算得到的结果来更新Q表格。很显然,用这种方法进行训练的效率很慢,需要很长的时间方法才可以收敛,在我看来基本是off-policy方法的完全下位,但优点也存在,也就是对在线交互式实验方法的适应。
从时序差分方程的角度看下面这张图,将其中的内容和方程中的联系起来看,就能大概理解sarsa做了什么:
off-policy是一种更加常用的方法,Q-learning和DQN都属于这一类的方法。从bellman方程中获取target值的区别就可以看到,他使用下个状态的采取所有动作的最佳Q值来优化,因此收敛也更快。
面向新手:从零学习强化学习