多智能体强化学习(Multi-Agent Reinforcement Learning, MARL )与单智能体强化学习(Single-Agent Reinforcement Learning, SARL )区别主要体现在环境的动态性 、智能体的目标 、学习的复杂性等
基础概念
1. 环境的动态性(Non-Stationarity)
- 单智能体(SARL):
- 智能体在一个相对稳定的、静态 的环境中学习。环境的动态性(即状态的转移和奖励的确定)只依赖于智能体自身的动作。
- 多智能体(MARL):
- 环境是非静态 的(Non-Stationary)。每个智能体的最优策略 不仅取决于环境的内在特性,还取决于其他所有智能体的策略和动作。
- 从单个智能体的角度来看,环境(包括其他智能体)的行为是不断变化的,这使得智能体很难收敛到一个稳定的最优策略。
2. 智能体的目标与关系
| 关系类型 | 目标 | 示例 |
|---|---|---|
| 单智能体(SARL) | 最大化其自身的累积奖励。 | 玩一个单人电子游戏。 |
| 多智能体(MARL) | 可以有多种目标关系: | |
| 合作 (Cooperative) | 所有智能体共同最大化一个共享的累积奖励。 | 交通灯控制、无人机编队飞行。 |
| 竞争 (Competitive) | 智能体尝试最大化自身 奖励,而最小化对手的奖励(零和博弈)。 | 围棋、国际象棋、电子竞技中的对战。 |
| 混合 (Mixed) | 智能体有各自的目标,可能部分重叠,也可能相互冲突(既合作又竞争)。 | 拍卖、资源共享。 |
还有一种关系:自我鼓励:他们只关注自己的奖励如何,并不关心别人的奖励(注意还是属于多智能体,因为每个智能体的决策还是会影响到其他智能体获得的奖励),比如股票交易系统
3. 动作空间与状态空间
- 单智能体(SARL): 状态空间和动作空间相对较小,只包括智能体自身的。
- 多智能体(MARL): 智能体的联合动作空间 是各个智能体动作空间的笛卡尔积(A1×A2×⋯×ANA_1 \times A_2 \times \dots \times A_NA1×A2×⋯×AN),其规模呈指数级增长 。这极大地增加了策略搜索和学习的难度,被称为维度灾难(Curse of Dimensionality)。
4. 挑战与核心问题
| 挑战 | 单智能体(SARL) | 多智能体(MARL) |
|---|---|---|
| 信度分配 (Credit Assignment) | 相对简单。奖励只与自身的动作序列相关。 | 困难 。奖励是所有智能体联合动作的结果,难以确定每个智能体对最终结果的贡献度。 |
| 收敛性 (Convergence) | 在适当条件下,通常可以保证收敛到最优策略。 | 难以保证 。目标是收敛到纳什均衡 (Nash Equilibrium) 或其他博弈论概念,但环境的非静态性使收敛非常困难。 |
| 可观测性 (Observability) | 通常是完全可观测 或部分可观测的(POMDP),但只有自身。 | 经常是部分可观测的(Dec-POMDP)。智能体只能观察到环境的一部分以及/或自身的状态,无法获取所有其他智能体的内部状态和动作。 |
| 通信 (Communication) | 不涉及。 | 重要问题。智能体是否应该、如何以及何时进行通信,以实现更好的合作或协调。 |
MARL中的几种架构
多智能体强化学习(MARL)的架构分类主要基于训练和执行阶段的信息共享程度 以及智能体之间的关系和目标。
核心上,MARL 的架构可以分为三大类:
- 完全集中式
- 完全分散式
- 集中训练/分散执行 (CTDE) 混合式
基于信息共享,控制程度来分类,这是 MARL 中最常用和最重要的分类方式,关注智能体在学习和实际应用中能获取多少信息,以及谁来做出最终决策。
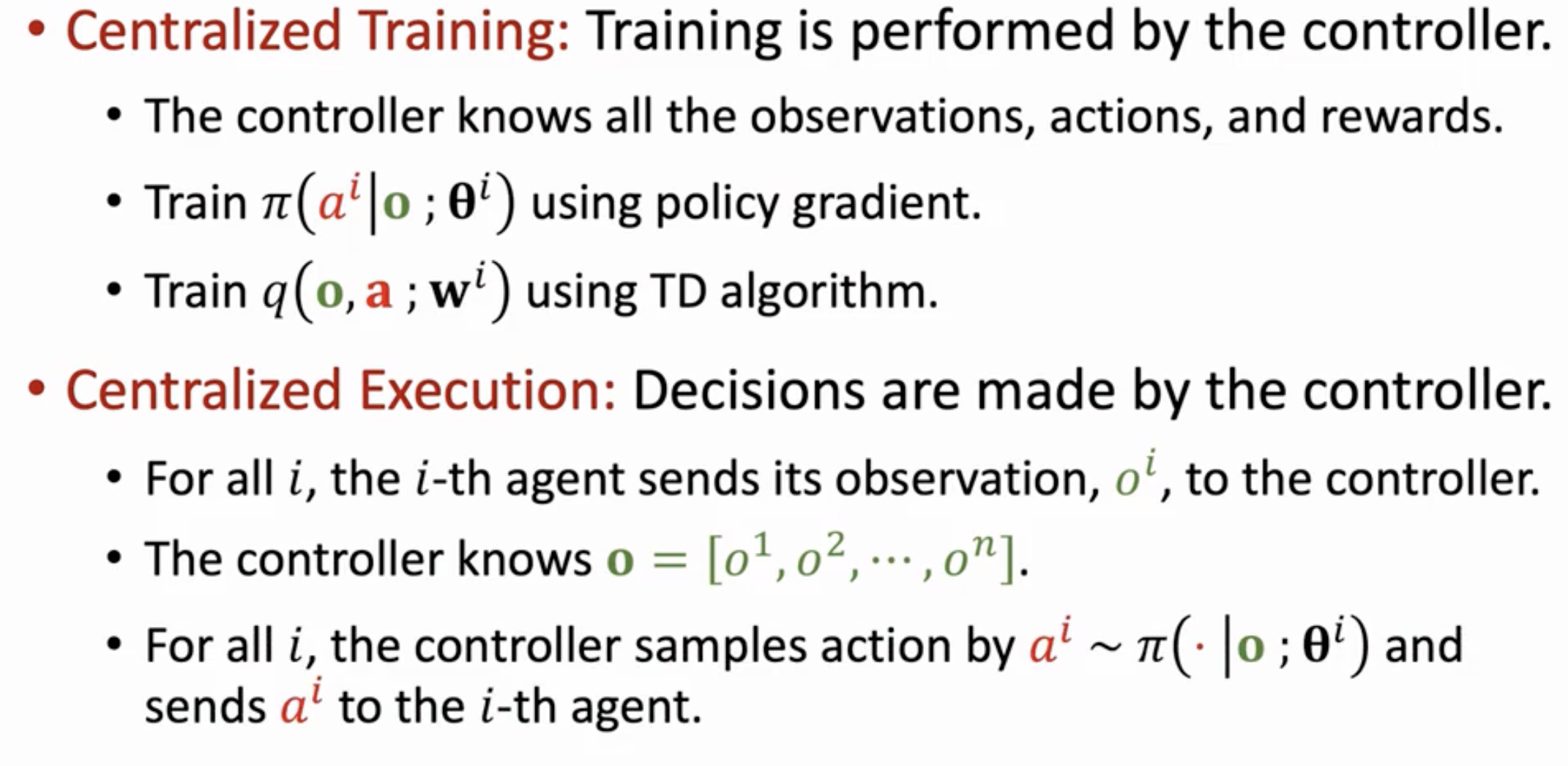
1. 完全集中式 (Centralized Training and Execution, CTE)
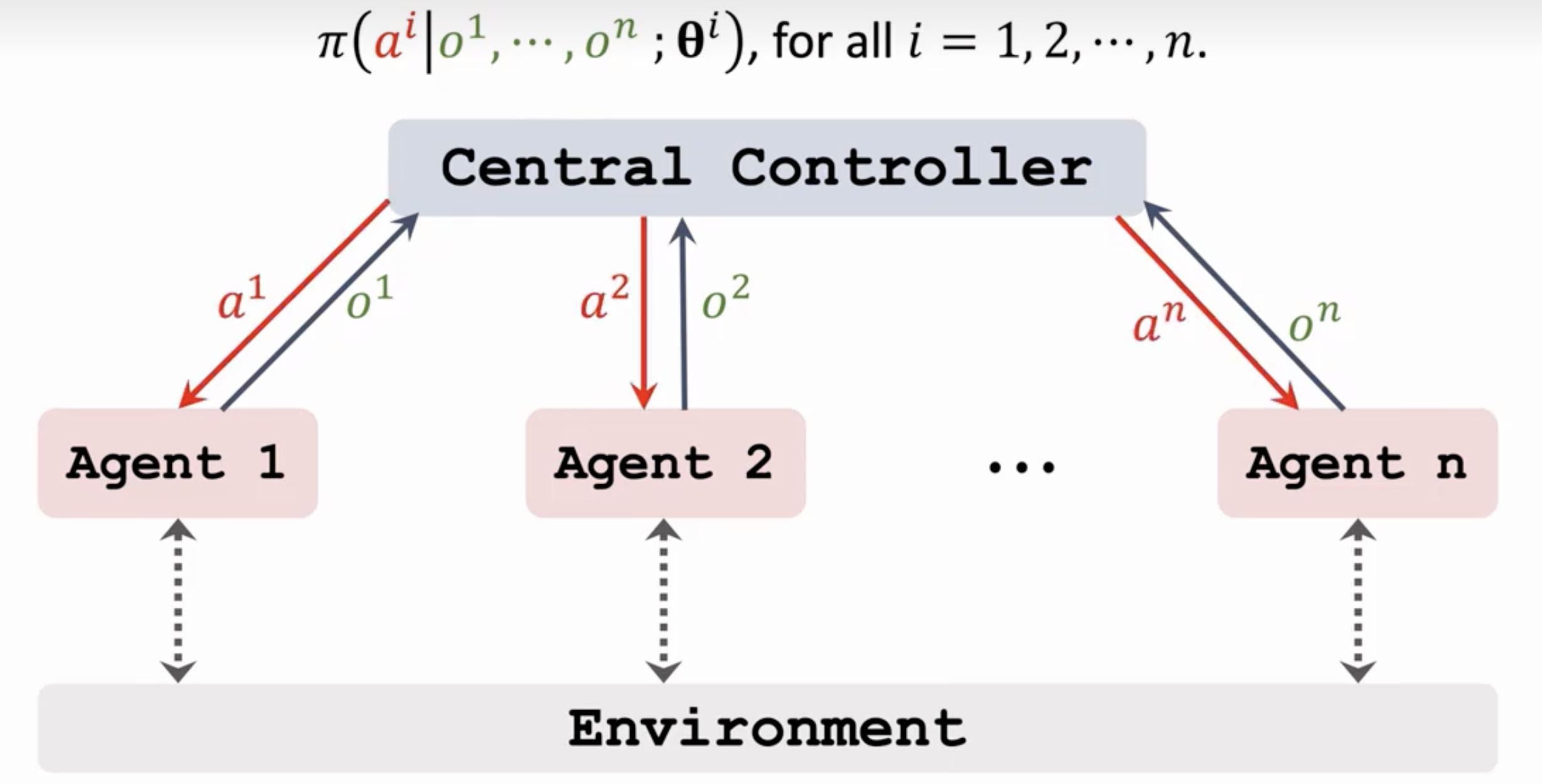
训练和执行 过程中,存在一个中央控制器(Central Controller) ,它可以访问所有智能体的观察、状态和动作,并进行全局决策
本质上,它将整个多智能体系统视为一个超级单智能体 , 可以利用全部的全局信息 ,能最容易地达到最优联合策略 。但随着智能体数量的增加,联合动作空间和状态空间呈指数级增长 (维度灾难)。鲁棒性差:一旦中央控制器失效,整个系统就会崩溃(单点故障)。现实应用受限: 许多实际场景(如机器人编队、无人驾驶)不允许在执行时进行完美的集中控制和通信。
训练与执行都是中性化的,另外这里的智能体都是可以观测到环境的,但是是各自的环境信息,并将她们的观测结果交给中央
python
class Centralized_Agent:
def __init__(self, global_obs_space, global_action_space):
# 集中式 Actor 和 Critic
self.actor = build_nn(global_obs_space, global_action_space) # 输出联合动作 A
self.critic = build_nn(global_obs_space + global_action_space, 1) # 估计 Q(O, A)
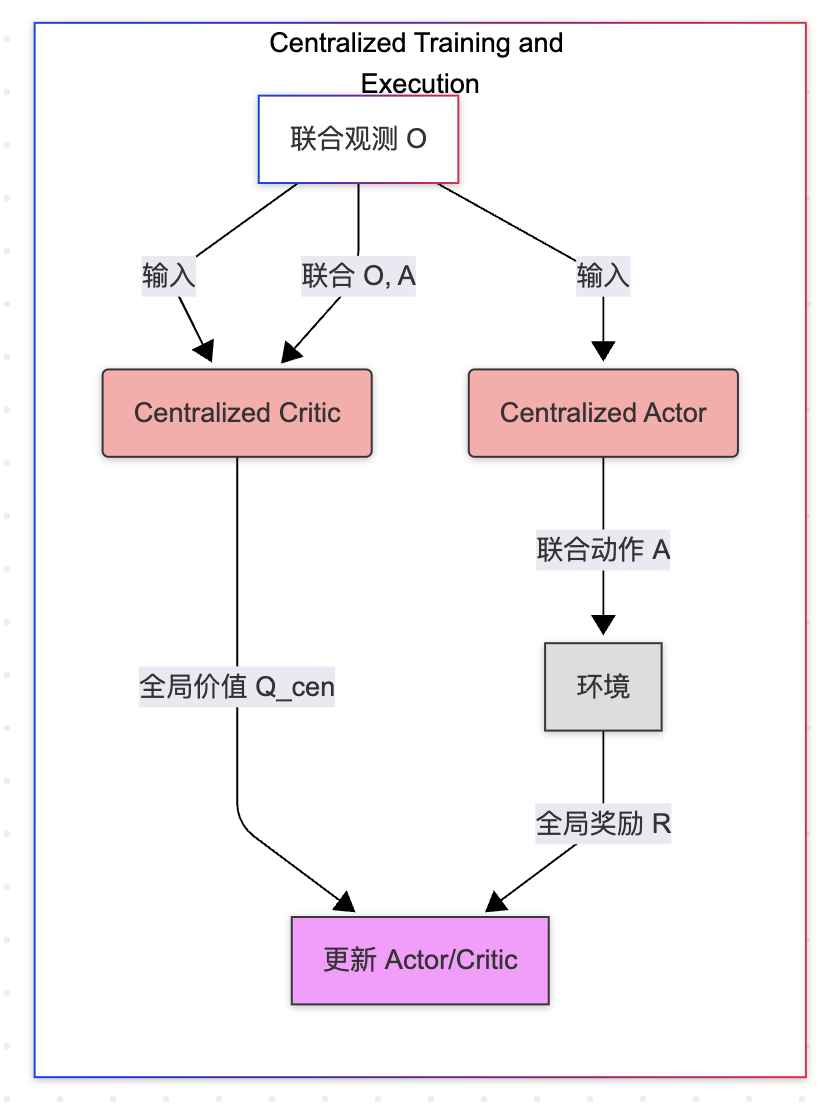
def select_action(self, O):
# 执行: 输入联合观测 O, 输出联合动作 A
return self.actor(O)
def update(self, global_batch, global_reward):
# 训练: 仅使用全局信息
# 1. 计算 Critic 损失 (使用全局奖励 R 和联合 Q 值)
# TD_Error_cen = R + gamma * Q_cen(O', A') - Q_cen(O, A)
# 2. 更新 Critic
self.critic.update()
# 3. 计算 Actor 损失 (最大化联合 Q 值)
# 4. 更新 Actor
self.actor.update()2. 完全分散式 (Decentralized Training and Execution, DTE)
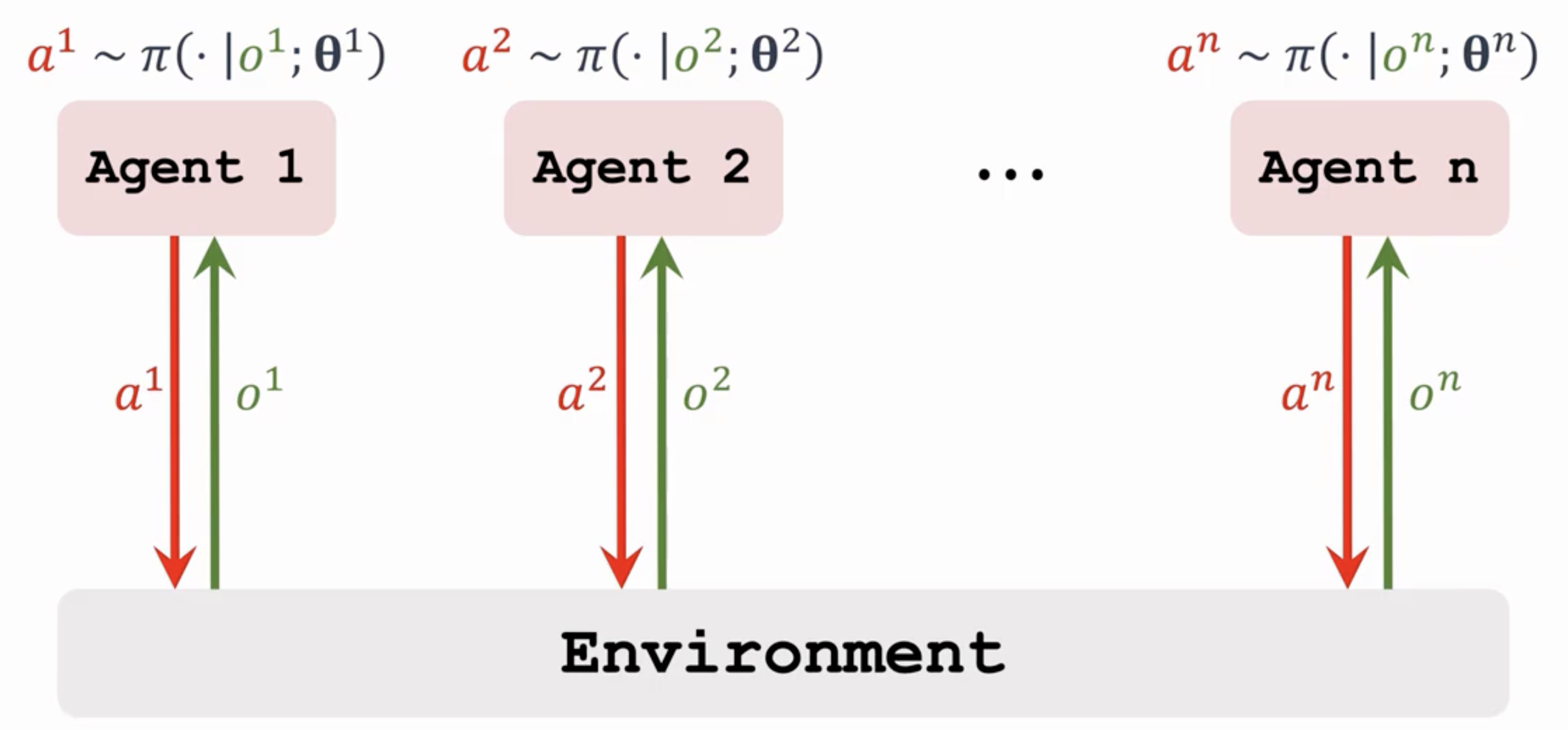
训练和执行 都完全分散。每个智能体独立学习和行动,只基于自身的局部观测 和局部奖励
其实是每个智能体都使用一个单智能体RL算法 ,但将其他智能体视为环境的一部分(即独立学习,Independent Learning),这种实现算法复杂度不随智能体数量呈指数增长,也没有单点故障等问题,但是收敛性差
根据AC我们可以给出下面的伪代码
python
class Independent_Agent_i:
def __init__(self, local_obs_space, local_action_space):
# 局部 Actor 和 Critic
self.actor = build_nn(local_obs_space, local_action_space)
self.critic = build_nn(local_obs_space, 1) # V(o_i) 或 Q(o_i, a_i)
def select_action(self, o_i):
# 执行: 只依赖局部观测
return self.actor(o_i)
def update(self, local_batch, global_reward):
# 训练: 仅用局部观测 o_i 和全局奖励 R
# 1. 计算 Critic 损失(使用全局奖励 R 作为 TD 目标)
# TD_Error_i = R + gamma * V_i(o'_i) - V_i(o_i)
# 2. 更新 Critic (最小化 TD 误差)
self.critic.update()
# 3. 计算 Actor 损失(例如,使用局部优势函数 A_i)
# A_i = R + gamma * V_i(o'_i) - V_i(o_i)
# 4. 更新 Actor (最大化带权重的 A_i)
self.actor.update()3. 集中训练/分散执行 (Centralized Training for Decentralized Execution, CTDE)
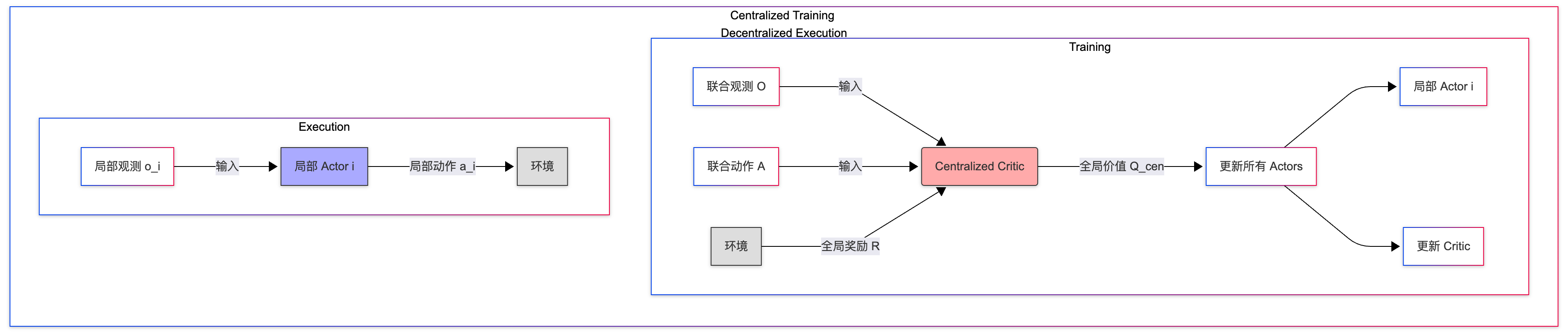
训练使用集中式 的全局信息来指导学习,根据全局信息训练多个全局 Critic(评估网络)
执行使用分散式 的局部策略,每个智能体只基于自身的局部观测来选择动作(即,使用局部 Actor/策略网络)。
python
class CTDE_System:
def __init__(self, num_agents, global_obs_space, global_action_space):
# 局部 Actor 列表
self.actors = [build_nn(o_space, a_space) for _ in range(num_agents)]
# 中央 Critic (输入联合 O 和 A)
self.critic_cen = build_nn(global_obs_space + global_action_space, 1)
def select_joint_action(self, O):
# 执行: 分散执行,每个 Actor 只看局部 o_i
A = [self.actors[i](O[i]) for i in range(num_agents)]
return A
def update(self, global_batch, global_reward):
# 训练: 集中式 Critic 指导
O, A, R, O_prime = global_batch
# 1. 更新中央 Critic
# TD_Target = R + gamma * Q_cen(O', A'_target)
# Critic Loss = MSE(Q_cen(O, A), TD_Target)
self.critic_cen.update()
# 2. 更新局部 Actor i (关键步骤)
for i in range(len(self.actors)):
# Actor Loss = -Q_cen(O, [A_{-i}, a_i])
# 其中 Q_cen 的 a_i 被替换为 Actor_i(o_i) 的输出
# 这意味着 Actor_i 的梯度是通过中央 Critic 传导的
self.actors[i].update_based_on_central_critic(self.critic_cen)| 架构范式 | 训练阶段(信息) | 执行阶段(信息) | 关键优势 | 典型算法 |
|---|---|---|---|---|
| CTE | 全局(集中) | 全局(集中) | 理论性能上限高,能完美协调 | 集中式 DDPG/PPO |
| DTE | 局部(分散) | 局部(分散) | 可扩展性强,鲁棒性高 | IPPO, IQL |
| CTDE | 全局(集中) | 局部(分散) | 兼顾高性能和实际部署要求 | QMIX, MAPPO, MADDPG |
| H-MARL | 分层/任务分解 | 分层/任务分解 | 解决长时间跨度的信度分配 | 基于 Option 的方法 |