功能简介
GPIO(General-purpose input/output)即通用型输入输出。通常,GPIO控制器通过分组的方式管理所有GPIO管脚,每组GPIO有一个或多个寄存器与之关联,通过读写寄存器完成对GPIO管脚的操作。
GPIO接口定义了操作GPIO管脚的标准方法集合,包括:
-
设置、获取管脚方向:方向可以是输入或者输出(暂不支持高阻态)。
-
读、写管脚电平值:电平值可以是低电平或高电平。
-
设置、取消管脚中断服务函数:设置一个管脚的中断响应函数,以及中断触发方式。取消一个管脚的中断服务函数。
-
使能、禁止管脚中断:禁止或使能管脚中断。
基本概念
GPIO又俗称为I/O口,I指的是输入(in),O指的是输出(out)。可以通过软件来控制其输入和输出,即I/O控制。
-
GPIO输入
输入是检测各个引脚上的电平状态,高电平或者低电平状态。常见的输入模式有:模拟输入、浮空输入、上拉输入、下拉输入。
-
GPIO输出
输出是当需要控制引脚电平的高低时需要用到输出功能。常见的输出模式有:开漏输出、推挽输出、复用开漏输出、复用推挽输出。
运作机制
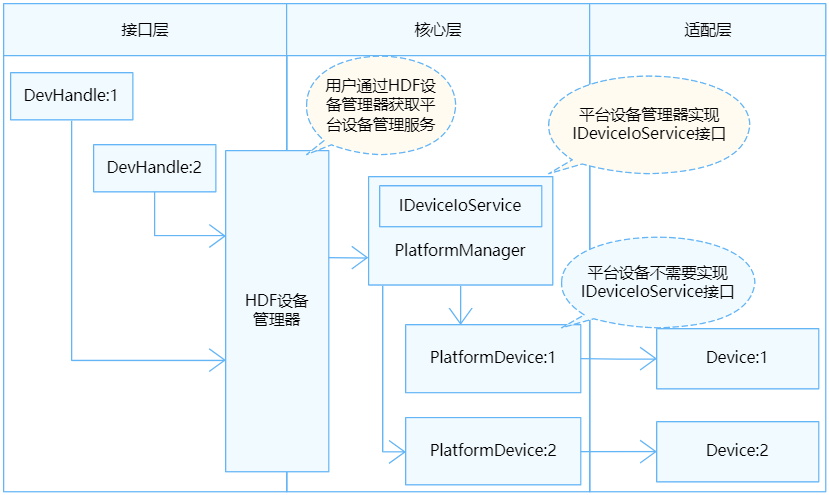
在HDF框架中,同类型设备对象较多时(可能同时存在十几个同类型配置器),若采用独立服务模式,则需要配置更多的设备节点,且相关服务会占据更多的内存资源。相反,采用统一服务模式可以使用一个设备服务作为管理器,统一处理所有同类型对象的外部访问(这会在配置文件中有所体现),实现便捷管理和节约资源的目的。GPIO模块接口适配模式采用统一服务模式(如图1所示)。
在统一模式下,所有的控制器都被核心层统一管理,并由核心层统一发布一个服务供接口层,因此这种模式下驱动无需再为每个控制器发布服务。
GPIO模块各分层作用:
-
接口层提供操作GPIO管脚的标准方法。
-
核心层主要提供GPIO管脚资源匹配,GPIO管脚控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互,供芯片厂家快速接入HDF框架。
-
适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 1 GPIO统一服务模式结构图
使用指导
场景介绍
GPIO主要是对GPIO管脚资源进行管理。开发者可以使用提供的GPIO操作接口,实现对管脚控制的具体控制。
接口说明
GPIO模块提供的主要接口如表1所示。具体API详见//drivers/hdf_core/framework/include/platform/gpio_if.h。
表 1 GPIO驱动API接口功能介绍
| 接口名 | 描述 |
|---|---|
| GpioGetByName(const char *gpioName) | 获取GPIO管脚ID |
| int32_t GpioRead(uint16_t gpio, uint16_t *val) | 读GPIO管脚电平值 |
| int32_t GpioWrite(uint16_t gpio, uint16_t val) | 写GPIO管脚电平值 |
| int32_t GpioGetDir(uint16_t gpio, uint16_t *dir) | 获取GPIO管脚方向 |
| int32_t GpioSetDir(uint16_t gpio, uint16_t dir) | 设置GPIO管脚方向 |
| int32_t GpioUnsetIrq(uint16_t gpio, void *arg) | 取消GPIO管脚对应的中断服务函数 |
| int32_t GpioSetIrq(uint16_t gpio, uint16_t mode, GpioIrqFunc func, void *arg) | 设置GPIO管脚对应的中断服务函数 |
| int32_t GpioEnableIrq(uint16_t gpio) | 使能GPIO管脚中断 |
| int32_t GpioDisableIrq(uint16_t gpio) | 禁止GPIO管脚中断 |
说明:
本文涉及GPIO的所有接口,支持内核态及用户态使用。
开发步骤
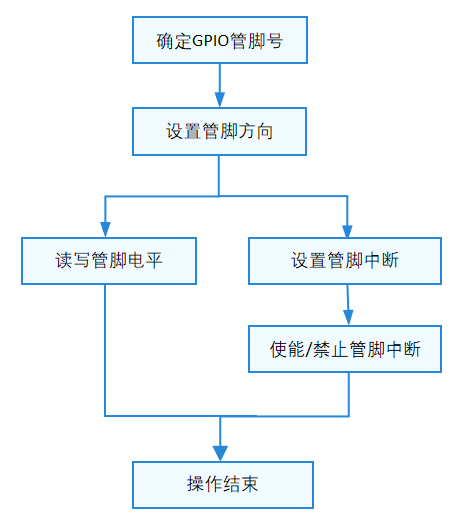
GPIO标准API通过GPIO管脚号来操作指定管脚,使用GPIO的一般流程如图2所示。
图 2 GPIO使用流程图
确定GPIO管脚号
两种方式获取管脚号:根据SOC芯片规则进行计算、通过管脚别名获取
-
根据SOC芯片规则进行计算
不同SOC芯片由于其GPIO控制器型号、参数、以及控制器驱动的不同,GPIO管脚号的换算方式不一样。
-
Hi3516DV300
控制器管理12组GPIO管脚,每组8个。
GPIO号 = GPIO组索引 (0~11) * 每组GPIO管脚数(8) + 组内偏移
举例:GPIO10_3的GPIO号 = 10 * 8 + 3 = 83
-
Hi3518EV300
控制器管理10组GPIO管脚,每组10个。
GPIO号 = GPIO组索引 (0~9) * 每组GPIO管脚数(10) + 组内偏移
举例:GPIO7_3的GPIO管脚号 = 7 * 10 + 3 = 73
-
-
通过管脚别名获取
调用接口GpioGetByName进行获取,入参是该管脚的别名,接口返回值是管脚的全局ID。
GpioGetByName(const char *gpioName);
设置GPIO管脚方向
在进行GPIO管脚读写前,需要先通过如下函数设置GPIO管脚方向:
int32_t GpioSetDir(uint16_t gpio, uint16_t dir);表 2 GpioSetDir参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| dir | uint16_t类型,待设置的方向值 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 设置GPIO管脚方向成功 |
| 负数 | 设置GPIO管脚方向失败 |
假设需要将GPIO管脚3的方向配置为输出,其使用示例如下:
int32_t ret;
ret = GpioSetDir(3, GPIO_DIR_OUT); // 将3号GPIO管脚配置为输出
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioSetDir: gpio set dir fail, ret:%d\n", ret);
return ret;
}获取GPIO管脚方向
可以通过如下函数获取GPIO管脚方向:
int32_t GpioGetDir(uint16_t gpio, uint16_t *dir);表 3 GpioGetDir参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| dir | uint16_t类型指针,获取到的方向值 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 获取GPIO管脚方向成功 |
| 负数 | 获取GPIO管脚方向失败 |
假设需要获取GPIO管脚3的方向,其使用示例如下:
int32_t ret;
uin16_t dir;
ret = GpioGetDir(3, &dir); // 获取3号GPIO管脚方向
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioGetDir: gpio get dir fail, ret:%d\n", ret);
return ret;
}读取GPIO管脚电平值
如果要读取一个GPIO管脚电平,通过以下函数完成:
int32_t GpioRead(uint16_t gpio, uint16_t *val);表 4 GpioRead参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| val | uint16_t类型指针,接收读取电平值 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 读取GPIO管脚电平值成功 |
| 负数 | 读取GPIO管脚电平值失败 |
假设需要读取GPIO管脚3的电平值,其使用示例如下:
int32_t ret;
uint16_t val;
ret = GpioRead(3, &val); // 读取3号GPIO管脚电平值
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioRead: gpio read fail, ret:%d\n", ret);
return ret;
}写入GPIO管脚电平值
如果要向GPIO管脚写入电平值,通过以下函数完成:
int32_t GpioWrite(uint16_t gpio, uint16_t val);表 5 GpioWrite参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| val | uint16_t类型,待写入的电平值 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 写入GPIO管脚电平值成功 |
| 负数 | 写入GPIO管脚电平值失败 |
假设需要给GPIO管脚3写入低电平值,其使用示例如下:
int32_t ret;
ret = GpioWrite(3, GPIO_VAL_LOW); // 给3号GPIO管脚写入低电平值
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioWrite: gpio write fail, ret:%d\n", ret);
return ret;
}设置GPIO管脚中断
如果要为一个GPIO管脚设置中断响应程序,使用如下函数:
int32_t GpioSetIrq(uint16_t gpio, uint16_t mode, GpioIrqFunc func, void *arg);表 6 GpioSetIrq参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| mode | uint16_t类型,中断触发模式 |
| func | 函数指针,中断服务程序 |
| arg | 无类型指针,传递给中断服务程序的入参 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 设置GPIO管脚中断成功 |
| 负数 | 设置GPIO管脚中断失败 |
注意:
同一时间,只能为某个GPIO管脚设置一个中断服务函数,如果重复调用GpioSetIrq函数,则之前设置的中断服务函数会被取代。
取消GPIO管脚中断
当不再需要响应中断服务函数时,使用如下函数取消中断设置:
int32_t GpioUnsetIrq(uint16_t gpio, void *arg);表 7 GpioUnsetIrq参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| arg | 无类型指针,GPIO中断数据 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 取消GPIO管脚中断成功 |
| 负数 | 取消GPIO管脚中断失败 |
使能GPIO管脚中断
在中断服务程序设置完成后,还需要先通过如下函数使能GPIO管脚的中断:
int32_t GpioEnableIrq(uint16_t gpio);表 8 GpioEnableIrq参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 使能GPIO管脚中断成功 |
| 负数 | 使能GPIO管脚中断失败 |
注意:
必须通过此函数使能管脚中断,之前设置的中断服务函数才能被正确响应。
禁止GPIO管脚中断
如果要临时屏蔽此中断,可以通过如下函数禁止GPIO管脚中断:
int32_t GpioDisableIrq(uint16_t gpio);表 9 GpioDisableIrq参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| gpio | uint16_t类型,GPIO管脚号 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 禁止GPIO管脚中断成功 |
| 负数 | 禁止GPIO管脚中断失败 |
中断相关操作示例:
// 中断服务函数
int32_t MyCallBackFunc(uint16_t gpio, void *data)
{
HDF_LOGI("MyCallBackFunc: gpio:%u interrupt service in data.\n", gpio);
return HDF_SUCCESS;
}
int32_t ret;
// 设置中断服务程序为MyCallBackFunc,入参为NULL,中断触发模式为上升沿触发
ret = GpioSetIrq(3, OSAL_IRQF_TRIGGER_RISING, MyCallBackFunc, NULL);
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioSetIrq: gpio set irq fail, ret:%d\n", ret);
return ret;
}
// 使能3号GPIO管脚中断
ret = GpioEnableIrq(3);
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioEnableIrq: gpio enable irq fail, ret:%d\n", ret);
return ret;
}
// 禁止3号GPIO管脚中断
ret = GpioDisableIrq(3);
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioDisableIrq: gpio disable irqfail, ret:%d\n", ret);
return ret;
}
// 取消3号GPIO管脚中断服务程序
ret = GpioUnsetIrq(3, NULL);
if (ret != HDF_SUCCESS) {
HDF_LOGE("GpioUnSetIrq: gpio unset irq fail, ret:%d\n", ret);
return ret;
}使用实例
本实例程序中,我们将测试一个GPIO管脚的中断触发:为管脚设置中断服务函数,触发方式为边沿触发,然后通过交替写高低电平到管脚,产生电平波动,制造触发条件,观察中断服务函数的执行。
首先需要选取一个空闲的GPIO管脚,本例程基于Hi3516DV300开发板,GPIO管脚选择GPIO10_3,换算成GPIO号为83。
读者可以根据自己使用的开发板,参考其原理图,选择一个空闲的GPIO管脚即可。
#include "gpio_if.h"
#include "hdf_log.h"
#include "osal_irq.h"
#include "osal_time.h"
static uint32_t g_irqCnt;
// 中断服务函数
static int32_t TestCaseGpioIrqHandler(uint16_t gpio, void *data)
{
HDF_LOGE("TestCaseGpioIrqHandler: irq triggered! on gpio:%u, in data", gpio);
g_irqCnt++; // 如果中断服务函数触发执行,则将全局中断计数加1
return GpioDisableIrq(gpio);
}
// 测试用例函数
static int32_t TestCaseGpioIrqEdge(void)
{
int32_t ret;
uint16_t valRead;
uint16_t mode;
uint16_t gpio = 84; // 待测试的GPIO管脚号
uint32_t timeout;
// 将管脚方向设置为输出
ret = GpioSetDir(gpio, GPIO_DIR_OUT);
if (ret != HDF_SUCCESS) {
HDF_LOGE("TestCaseGpioIrqEdge: set dir fail! ret:%d\n", ret);
return ret;
}
// 先禁止该管脚中断
ret = GpioDisableIrq(gpio);
if (ret != HDF_SUCCESS) {
HDF_LOGE("TestCaseGpioIrqEdge: disable irq fail! ret:%d\n", ret);
return ret;
}
// 为管脚设置中断服务函数,触发模式为上升沿和下降沿共同触发
mode = OSAL_IRQF_TRIGGER_RISING | OSAL_IRQF_TRIGGER_FALLING;
HDF_LOGE("TestCaseGpioIrqEdge: mode:%0x\n", mode);
ret = GpioSetIrq(gpio, mode, TestCaseGpioIrqHandler, NULL);
if (ret != HDF_SUCCESS) {
HDF_LOGE("TestCaseGpioIrqEdge: set irq fail! ret:%d\n", ret);
return ret;
}
// 使能此管脚中断
ret = GpioEnableIrq(gpio);
if (ret != HDF_SUCCESS) {
HDF_LOGE("TestCaseGpioIrqEdge: enable irq fail! ret:%d\n", ret);
(void)GpioUnsetIrq(gpio, NULL);
return ret;
}
g_irqCnt = 0; // 清除全局计数器
timeout = 0; // 等待时间清零
// 等待此管脚中断服务函数触发,等待超时时间为1000毫秒
while (g_irqCnt <= 0 && timeout < 1000) {
(void)GpioRead(gpio, &valRead);
(void)GpioWrite(gpio, (valRead == GPIO_VAL_LOW) ? GPIO_VAL_HIGH : GPIO_VAL_LOW);
HDF_LOGE("TestCaseGpioIrqEdge: wait irq timeout:%u\n", timeout);
OsalMDelay(200); // 等待中断触发
timeout += 200;
}
(void)GpioUnsetIrq(gpio, NULL);
HDF_LOGI("TestCaseGpioIrqEdge: function tests end, g_irqCnt:%u", g_irqCnt);
return (g_irqCnt > 0) ? HDF_SUCCESS : HDF_FAILURE;
}最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?但是又不知道从哪里下手,而且学习时频繁踩坑,最终浪费大量时间。所以本人整理了一些比较合适的鸿蒙**(HarmonyOS NEXT)**学习路径和一些资料的整理供小伙伴学习
点击领取→ 纯血鸿蒙Next全套最新学习资料(安全链接,放心点击)
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
**一、**鸿蒙(HarmonyOS NEXT)最新学习路线
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含: (ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)****...等技术 知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
二、HarmonyOS Next 最新全套视频教程
三、《鸿蒙 (OpenHarmony)开发基础到实战手册》
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .......

《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ......
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ......
四、大厂面试必问面试题
五、鸿蒙南向开发技术
六、鸿蒙APP开发必备
七、鸿蒙生态应用开发白皮书V2.0PDF
完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料****
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。
