本文介绍STM32 I2C总线锁死原因及解决方法。
在使用STM32 I2C总线操作外设时,有时会遇到I2C总线锁死(I2C总线为Busy状态)的问题,即便复位MCU也无法解决,本文介绍其锁死的原因和解决方法,并给出相应的参考代码。
1.故障现象
在I2C总线锁死时,使用示波器测量发现,SCL为高电平,SDA为低电平。
1)MCU操作I2C总线(读/写)时复位MCU(通过复位按键操作)比较容易再现。
2)MCU操作I2C总线(读/写)时,强制将SDA拉低(用金属摄子夹到地,并持续一段时间)会再现。
3)设想,MCU操作I2C总线过程中,SDA受外界干扰(毛刺)被拉低,也可能导致I2C总线锁死。
2.原因
1)I2C总线被设计成多主机可共享总线,这会导致总线竞争,主设备判断当前总线被占用是根据SDA线为低来判断的。当主设备检测到总线被占用,则指示总线忙,并无法操作总线。
2)主设备操作从设备(读/写)时,复位主设备,如果恰好从设备处于ACK状态(SDA拉低)或回复主设备数据位0,那么在复位完成,主设备重新接管总线时,会错误的认为总线忙,因为此时从设备并未复位,SDA仍然被拉低。从设备等待主设备拉低SCL取走ACK或者数据位0,而主设备等待从设备释放SDA。主设备和从设备互相等待,进入死锁状态。值的注意的时,对于故障现象2),STM32 I2C内部似乎有超时机制,如果SDA被拉低持续一段时间,则无法恢复。
3.解决方法
1)硬件复位
直接硬件复位外部从设备,比如通过MOS管软开关从设备电源,或通过外部设备硬件复位脚(从设备有才行)复位。
2)软件复位
情况1:
出现I2C总线锁死时正好外设回复数据位0,则需经历小于9个SCL时钟,从设备会释放SDA。
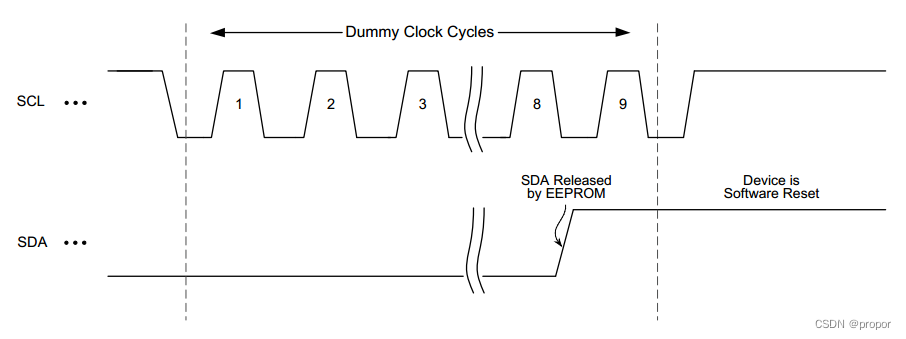
情况2:
出现I2C总线锁死时正好外设ACK,则经历9个SCL时钟,从设备会释放SDA。
综合情况1,2可知,通过软件复位解决时,当检测到总线锁死(BUSY状态),可以生成9个SCL时钟,并不断检测SDA引脚电平状态,若SDA被释放(为高)则退出,主机重新初始化I2C总线。Software Rest如下图。
I2C-bus specification中:

3)某些I2C缓冲器提供I2C总线错误恢复功能(如LTC4307)。
4.参考代码
参考代码如下(这里以STM32F4xx平台为例,其它平台类似):
DrvI2C1.h:
cpp
#ifndef __DRV_I2C1_H
#define __DRV_I2C1_H
#ifdef __cplusplus
extern "C" {
#endif
#include "datatype.h"
#include "stm32f4xx_hal.h"
#define I2C1_SCL_GPIO_PORT (GPIOB)
#define I2C1_SCL_PIN (GPIO_PIN_6)
#define I2C1_SDA_GPIO_PORT (GPIOB)
#define I2C1_SDA_PIN (GPIO_PIN_7)
extern I2C_HandleTypeDef hi2c1;
extern int32_t I2C1_Init(void);
#ifdef __cplusplus
}
#endif
#endifDrvI2C1.c:
cpp
#include "DrvI2C1.h"
I2C_HandleTypeDef hi2c1;
static void I2C1_MspInit(I2C_HandleTypeDef* i2cHandle);
static void I2C1_MspDeInit(I2C_HandleTypeDef* i2cHandle);
static BOOL I2C1_Unlock(void);
static void I2C1_SetPortODOutput(void);
int32_t I2C1_Init(void)
{
if (!I2C1_Unlock())
{
DbgPrint("I2C1 unlock failed!\r\n");
}
if (HAL_I2C_RegisterCallback(&hi2c1, HAL_I2C_MSPINIT_CB_ID, I2C1_MspInit) != HAL_OK)
{
Error_Handler();
}
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 200000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
if (HAL_I2C_RegisterCallback(&hi2c1, HAL_I2C_MSPDEINIT_CB_ID, I2C1_MspDeInit) != HAL_OK)
{
Error_Handler();
}
return 0;
}
static void I2C1_MspInit(I2C_HandleTypeDef* i2cHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
GPIO_InitStruct.Pin = I2C1_SCL_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(I2C1_SCL_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = I2C1_SDA_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(I2C1_SDA_GPIO_PORT, &GPIO_InitStruct);
/* I2C1 clock enable */
__HAL_RCC_I2C1_CLK_ENABLE();
}
static void I2C1_MspDeInit(I2C_HandleTypeDef* i2cHandle)
{
/* Peripheral clock disable */
__HAL_RCC_I2C1_CLK_DISABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
HAL_GPIO_DeInit(I2C1_SCL_GPIO_PORT, I2C1_SCL_PIN);
HAL_GPIO_DeInit(I2C1_SDA_GPIO_PORT, I2C1_SDA_PIN);
}
static BOOL I2C1_Unlock(void)
{
uint8_t i = 0;
I2C1_SetPortODOutput();
HAL_GPIO_WritePin(I2C1_SCL_GPIO_PORT, I2C1_SCL_PIN, GPIO_PIN_SET); //Release bus
HAL_GPIO_WritePin(I2C1_SDA_GPIO_PORT, I2C1_SDA_PIN, GPIO_PIN_SET);
if (HAL_GPIO_ReadPin(I2C1_SDA_GPIO_PORT, I2C1_SDA_PIN) == GPIO_PIN_RESET)
{
for (i = 0; i < 9; i++)
{
HAL_GPIO_WritePin(I2C1_SCL_GPIO_PORT, I2C1_SCL_PIN, GPIO_PIN_RESET);
DelayUS(5); //
HAL_GPIO_WritePin(I2C1_SCL_GPIO_PORT, I2C1_SCL_PIN, GPIO_PIN_SET);
DelayUS(5); //
if (HAL_GPIO_ReadPin(I2C1_SDA_GPIO_PORT, I2C1_SDA_PIN) == GPIO_PIN_SET)
{
break;
}
}
if (i >= 9)
{
return FALSE;
}
}
return TRUE;
}
static void I2C1_SetPortODOutput(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = I2C1_SCL_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(I2C1_SCL_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = I2C1_SDA_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(I2C1_SDA_GPIO_PORT, &GPIO_InitStruct);
}注意:
1)上电即对I2C总线作检测,并执行解锁操作,见初始化的开头部分。
2)"HAL_I2C_Init()"函数内部包含对I2C总线的复位操作,因此,"I2C1_Unlock()"函数里未对I2C总线作复位操作。若HAL库里未对I2C总线作复位操作,则需添加如下代码:
cpp
static void I2C1_Reset(void)
{
/*Reset I2C*/
I2C1->CR1 |= I2C_CR1_SWRST;
I2C1->CR1 &= ~I2C_CR1_SWRST;
}3)在操作I2C外设出错时,若需要添加解锁操作,可按如下进行:
cpp
if (HAL_I2C_Master_Transmit(&hi2c1, SlaveAddr, &Value, 1, 1000) != HAL_OK)
{
HAL_I2C_DeInit(&hi2c1);
I2C1_Init();
}先取消初始化I2C,再对I2C进行初始化(包含解锁操作)。
参考:
1)NXP,UM10204 I2C-bus specification and user manual
2)Microchip,AT24CM01 Datasheet
3)Analog,LTC4307 Datasheet(内有芯片采用的死锁恢复机制)
总结,本文介绍了STM32 I2C总线锁死原因及解决方法。