RK3588 + YOLOv8 田块分割实战指南:从环境搭建到部署落地全流程
引言:在智慧农业领域,田块分割是实现精准灌溉、变量施肥、作物长势监测的核心前提。依托 RK3588 强大的 NPU 算力(算力高达 6TOPS)与 YOLOv8 高效的实例分割能力,我们能快速构建低成本、高性能的田块分割系统。本文将从 0 到 1 拆解全流程,涵盖环境安装、数据集准备、模型训练、RKNN 模型转换、板端推理测试,新手也能轻松跟进!
一、环境搭建:PC 端训练环境 + RK3588 部署环境
核心需求:PC 端完成模型训练与导出,RK3588 端完成模型部署与推理,需保证两端环境兼容性。
1.1 PC 端训练环境搭建(Ubuntu 20.04 为例)
推荐使用 Anaconda 管理环境,避免依赖冲突:
-
安装 Anaconda 并创建虚拟环境
# 下载并安装 Anaconda(略,官网可查) conda create -n yolov8-rk3588 python=3.9 conda activate yolov8-rk3588 -
安装 PyTorch 与 TorchVision(适配 YOLOv8,推荐 1.13.1 版本)
pip3 install torch==1.13.1+cu117 torchvision==0.14.1+cu117 --extra-index-url https://download.pytorch.org/whl/cu117 -
安装 YOLOv8 核心依赖
`# 安装 ultralytics(YOLOv8 官方库)
pip install ultralytics
安装数据集标注工具(可选,用于自制数据集)
pip install labelme
安装其他辅助依赖
pip install opencv-python matplotlib numpy`
- 验证环境:运行如下命令,若无报错则环境正常
from ultralytics import YOLO model = YOLO('yolov8n-seg.pt') # 加载预训练分割模型 print("环境验证成功!")
1.2 RK3588 端部署环境搭建(Ubuntu 22.04 系统)
核心依赖:RKNN Toolkit2(模型转换与推理)、OpenCV(图像处理)
- 安装 RKNN Toolkit2(适配 RK3588,推荐 1.4.0 版本)
`# 安装依赖
sudo apt-get install -y python3-pip python3-dev libopencv-dev
安装 RKNN Toolkit2(根据系统架构选择,RK3588 为 aarch64)
pip3 install rknn-toolkit2==1.4.0 -i https://pypi.tuna.tsinghua.edu.cn/simple\`
-
安装 OpenCV 开发库
sudo apt-get install -y libopencv-core-dev libopencv-highgui-dev libopencv-imgproc-dev -
验证环境:
from rknn.api import RKNN rknn = RKNN() print("RK3588 部署环境验证成功!")
二、数据集准备与模型训练
田块分割属于实例分割任务,需标注田块区域的掩码(mask)信息。
2.1 数据集准备
-
数据采集:收集不同光照、不同角度的农田图像(建议至少 500 张,越多训练效果越好),分辨率统一调整为 640×640(适配 YOLOv8 输入)。
-
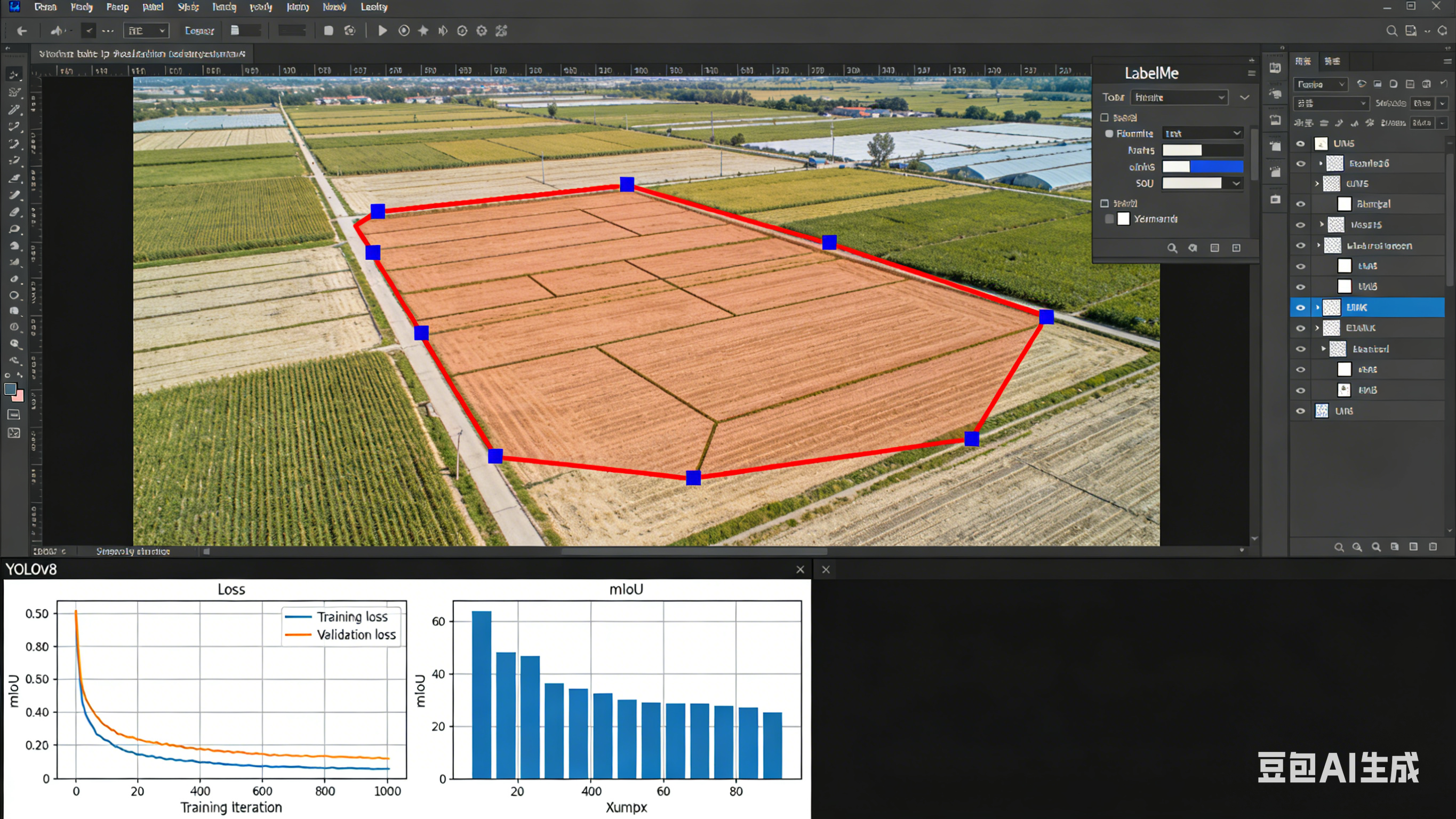
数据标注:使用 LabelMe 工具标注,打开终端输入
labelme,选择图像文件夹,点击"Create Polygons"标注田块轮廓,标签设为"field",标注完成后生成 JSON 文件。 -
格式转换:将 LabelMe 生成的 JSON 文件转换为 YOLOv8 所需的 txt 格式(包含目标框与掩码信息),可使用如下脚本:
`import json
import os
import cv2
import numpy as np
def labelme2yolo(labelme_dir, yolo_dir, class_names):
if not os.path.exists(yolo_dir):
os.makedirs(yolo_dir)
for json_file in os.listdir(labelme_dir):
if json_file.endswith('.json'):
读取 JSON 文件
with open(os.path.join(labelme_dir, json_file), 'r') as f:
data = json.load(f)
读取图像
img = cv2.imread(os.path.join(labelme_dir, data'imagePath'))
h, w = img.shape:2
生成 txt 文件
txt_path = os.path.join(yolo_dir, json_file.replace('.json', '.txt'))
with open(txt_path, 'w') as f:
for shape in data'shapes':
label = shape'label'
if label not in class_names:
continue
class_id = class_names.index(label)
转换坐标(LabelMe 为像素坐标,YOLO 为归一化坐标)
points = np.array(shape'points')
points:, 0 /= w
points:, 1 /= h
写入 txt(格式:class_id x1 y1 x2 y2 ...)
f.write(f"{class_id} " + " ".join(f"{x:.6f} {y:.6f}" for x, y in points) + "\n")
保存图像到 yolo 目录
cv2.imwrite(os.path.join(yolo_dir, data'imagePath'), img)
执行转换(class_names 为标注的标签列表)
labelme2yolo("labelme_data", "yolo_data", "field")`
- 数据集划分:将 yolo_data 文件夹分为 train(80%)、val(20%),目录结构如下:
yolo_field_data/ ├── train/ │ ├── images/ # 训练图像 │ └── labels/ # 训练标签 └── val/ ├── images/ # 验证图像 └── labels/ # 验证标签
2.2 模型训练
-
创建 YOLOv8 配置文件:在 ultralytics/cfg/datasets/ 目录下创建 field_seg.yaml,内容如下:
# field_seg.yaml path: ./yolo_field_data # 数据集根目录 train: train/images # 训练图像路径 val: val/images # 验证图像路径 nc: 1 # 类别数(仅田块一个类别) names: ['field'] # 类别名称 -
启动训练:使用 YOLOv8n-seg 轻量化模型(适合嵌入式部署),执行训练命令:
yolo segment train data=field_seg.yaml model=yolov8n-seg.pt epochs=100 batch=16 imgsz=640 lr0=0.01 device=0参数说明:epochs(训练轮数)、batch(批次大小)可根据 PC 显存调整;device=0 表示使用 GPU 训练(无 GPU 可去掉此参数,用 CPU 训练,速度较慢)。 -
训练监控:训练过程中会自动生成 runs/segment/train 目录,包含训练日志、损失曲线、验证指标(mIoU 是分割任务核心指标,越高越好)。若验证集 mIoU 不再提升,可提前停止训练。
-
导出训练好的模型:训练完成后,在 runs/segment/train/weights 目录下有 best.pt(最优模型)和 last.pt(最后一轮模型),导出为 ONNX 格式(后续转换 RKNN 需此中间格式):
yolo export model=runs/segment/train/weights/best.pt format=onnx imgsz=640导出成功后,会生成 best.onnx 文件。
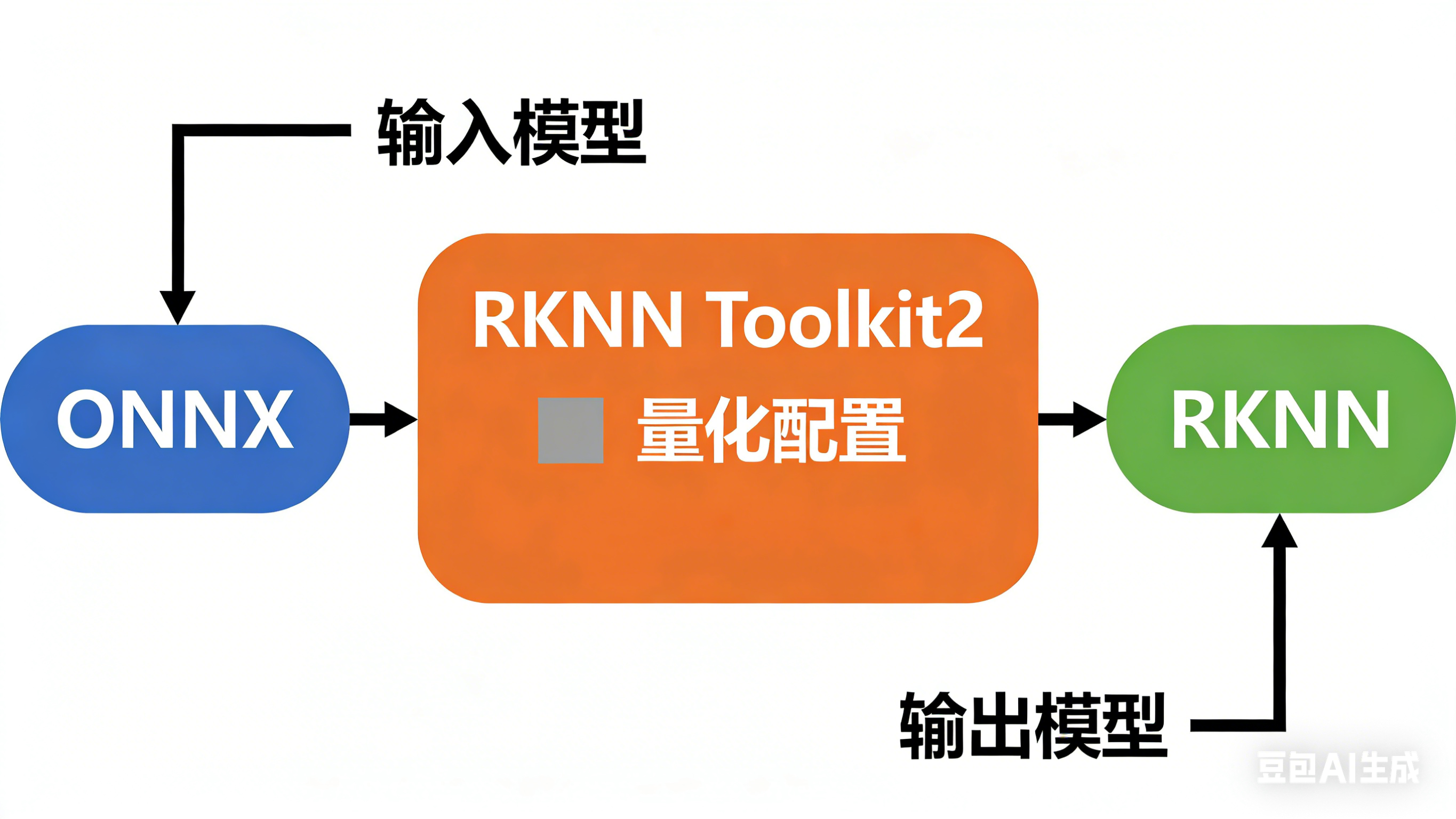
三、模型转换:ONNX → RKNN
RK3588 需加载 RKNN 格式模型才能调用 NPU 加速,需使用 RKNN Toolkit2 完成转换,支持量化(INT8 量化可提升推理速度、降低功耗)。
3.1 编写转换脚本(PC 端执行)
python
from rknn.api import RKNN
if __name__ == "__main__":
# 1. 初始化 RKNN 对象
rknn = RKNN(verbose=True)
# 2. 配置模型参数(输入图像预处理)
ONNX_MODEL = "best.onnx" # 输入 ONNX 模型
RKNN_MODEL = "best.rknn" # 输出 RKNN 模型
DATASET = "dataset.txt" # 量化数据集路径(包含少量验证集图像路径)
INPUT_SIZE = [640, 640] # 输入尺寸
# 3. 加载 ONNX 模型
print("Loading ONNX model...")
ret = rknn.load_onnx(model=ONNX_MODEL, input_size_list=[INPUT_SIZE])
if ret != 0:
print("Load ONNX model failed!")
exit(ret)
# 4. 配置量化参数(INT8 量化,提升性能)
print("Configuring model...")
ret = rknn.config(mean_values=[[0, 0, 0]], # 图像归一化均值(YOLOv8 已预处理,设为 0)
std_values=[[255, 255, 255]], # 图像归一化标准差
quant_img_RGB2BGR=True, # YOLOv8 输入为 RGB,RK3588 偏好 BGR,需转换
quantize_mode="float16" # 若需更高速度,可改为 "int8",需准备量化数据集
)
if ret != 0:
print("Configure model failed!")
exit(ret)
# 5. 构建 RKNN 模型
print("Building RKNN model...")
ret = rknn.build(do_quantization=False) # 先不量化,验证转换是否成功;成功后再改为 True 量化
if ret != 0:
print("Build RKNN model failed!")
exit(ret)
# 6. 导出 RKNN 模型
print("Exporting RKNN model...")
ret = rknn.export_rknn(RKNN_MODEL)
if ret != 0:
print("Export RKNN model failed!")
exit(ret)
# 7. 释放资源
rknn.release()
print("Model converted successfully!")3.2 关键说明
-
量化数据集:若使用 INT8 量化,需创建 dataset.txt 文件,每行填写一张验证集图像的绝对路径(如 /home/user/yolo_field_data/val/images/1.jpg),建议至少 50 张图像。
-
转换验证:先以 float16 模式转换,成功后再尝试 INT8 量化,避免因量化问题导致转换失败。
-
模型传输:将转换好的 best.rknn 文件通过 scp 或 U 盘拷贝到 RK3588 开发板(如 /home/rk3588/field_seg/ 目录)。
四、推理测试:RK3588 板端部署
编写推理脚本,调用 RK3588 NPU 加载 RKNN 模型,对田块图像进行分割测试。
4.1 板端推理脚本
python
from rknn.api import RKNN
import cv2
import numpy as np
def preprocess_image(image_path, input_size):
# 读取图像
img = cv2.imread(image_path)
# 调整尺寸
img_resized = cv2.resize(img, input_size)
# 归一化(与训练时一致)
img_normalized = img_resized / 255.0
# 转换为 NCHW 格式(RKNN 输入要求)
img_transposed = np.transpose(img_normalized, (2, 0, 1))
# 扩展维度(添加 batch 维度)
img_input = np.expand_dims(img_transposed, axis=0).astype(np.float32)
return img, img_input
def postprocess_output(output, input_size, img_origin, class_names, conf_thres=0.5):
# YOLOv8 分割输出包含:目标框、置信度、类别、掩码
# 此处简化处理,提取掩码并可视化
# 实际项目需根据 YOLOv8 输出格式解析(可参考 ultralytics 官方后处理代码)
masks = output[0] # 掩码输出(假设第一个输出为掩码)
# 调整掩码尺寸为原始图像尺寸
masks_resized = cv2.resize(masks.squeeze(0).transpose(1,2,0), (img_origin.shape[1], img_origin.shape[0]))
# 过滤低置信度掩码
masks_filtered = (masks_resized[..., 0] > conf_thres).astype(np.uint8) * 255
# 可视化:将田块区域标记为绿色
img_result = img_origin.copy()
img_result[masks_filtered == 255] = [0, 255, 0] # 田块区域设为绿色
return img_result
if __name__ == "__main__":
# 1. 初始化 RKNN 对象
rknn = RKNN()
# 2. 加载 RKNN 模型
RKNN_MODEL = "best.rknn"
INPUT_SIZE = (640, 640)
CLASS_NAMES = ["field"]
ret = rknn.load_rknn(RKNN_MODEL)
if ret != 0:
print("Load RKNN model failed!")
exit(ret)
# 3. 初始化运行环境
print("Initializing runtime environment...")
ret = rknn.init_runtime(target="rk3588", device_id="0") # target 指定为 rk3588
if ret != 0:
print("Init runtime environment failed!")
exit(ret)
# 4. 读取并预处理图像
IMAGE_PATH = "test_field.jpg" # 测试图像路径
img_origin, img_input = preprocess_image(IMAGE_PATH, INPUT_SIZE)
# 5. 执行推理
print("Running inference...")
outputs = rknn.inference(inputs=[img_input])
# 6. 后处理并可视化
img_result = postprocess_output(outputs, INPUT_SIZE, img_origin, CLASS_NAMES)
# 7. 显示与保存结果
cv2.imshow("Field Segmentation Result", img_result)
cv2.waitKey(0)
cv2.imwrite("result.jpg", img_result)
print("Inference completed! Result saved as result.jpg")
# 8. 释放资源
rknn.release()
cv2.destroyAllWindows()4.2 测试步骤与结果验证
-
准备测试图像:在 RK3588 开发板上放置一张农田测试图像(test_field.jpg)。
-
运行推理脚本:
python3 rknn_inference.py -
结果查看:脚本会显示分割结果(田块区域标记为绿色),并保存为 result.jpg。若分割区域准确、无明显漏检/误检,说明部署成功。
-
性能测试:可添加计时代码,统计推理耗时(RK3588 NPU 推理 YOLOv8n-seg 模型,640×640 输入下耗时可低至 20ms 以内,满足实时需求)。
五、总结与优化方向
5.1 全流程总结
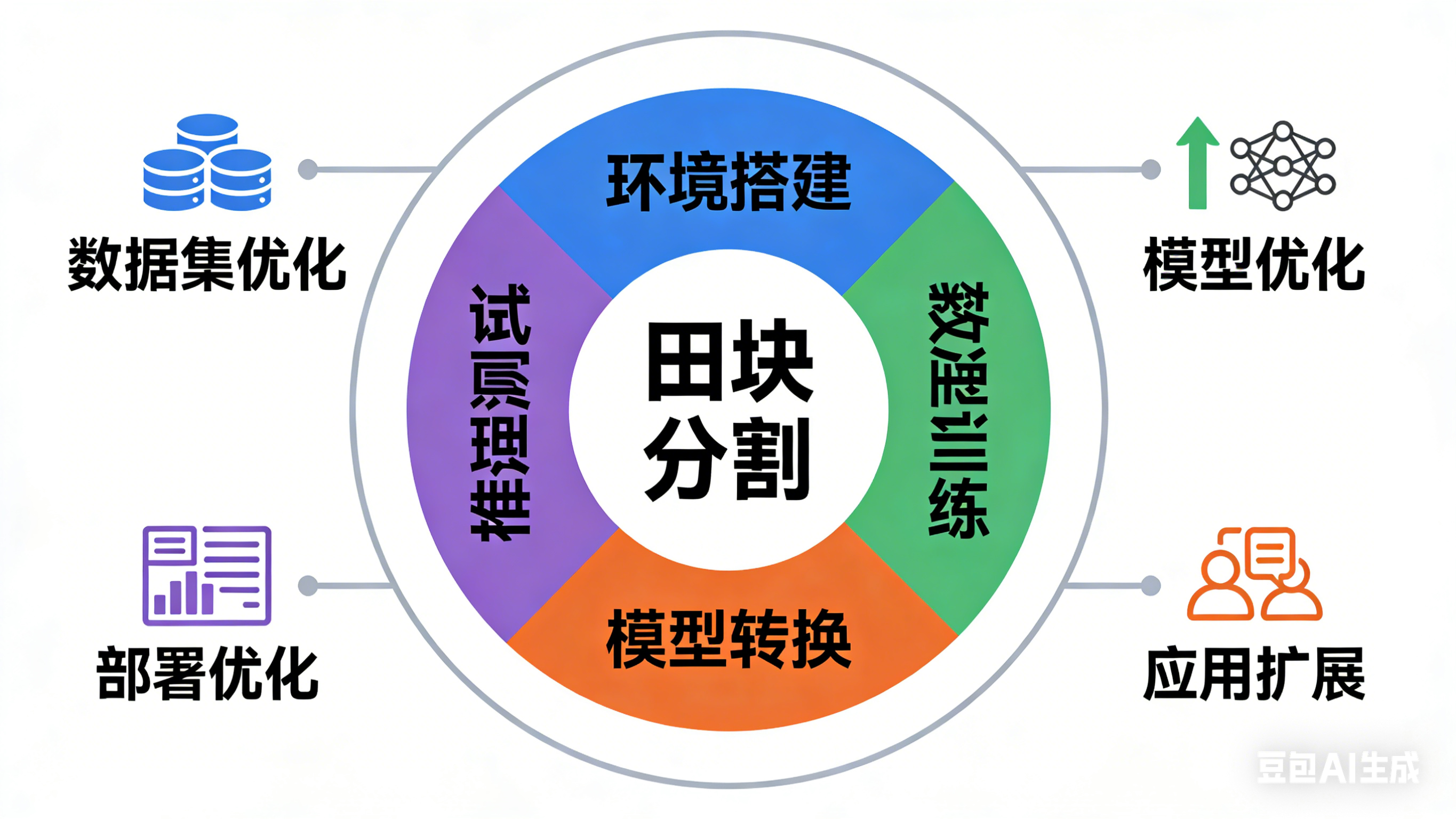
本文完成了从 PC 端环境搭建、数据集标注与训练,到 ONNX 模型导出、RKNN 模型转换,再到 RK3588 板端推理的全流程实现。核心优势在于利用 YOLOv8 高效的分割能力与 RK3588 强大的 NPU 算力,实现了低成本、实时性的田块分割系统。
5.2 优化方向
-
数据集优化:增加更多场景(如雨天、阴天、不同作物类型)的田块图像,提升模型泛化能力。
-
模型优化:使用 YOLOv8s-seg 模型(精度更高)或通过剪枝、量化进一步提升推理速度。
-
应用扩展:结合视频流推理,实现实时田块监测;添加田块面积计算、边界提取等功能。
-
部署优化:将 Python 脚本封装为 C++ 程序,进一步降低 latency,适配嵌入式实时系统。
结语:通过本文的全流程指南,相信你已掌握 RK3588 + YOLOv8 实现田块分割的核心技术。后续可根据实际应用场景持续优化,推动智慧农业相关产品的落地。如果在操作过程中遇到问题,欢迎在评论区交流!