单片机型号(Arduino)
目录
一、摘要
二、设计要求
三、原理图
四、说明书预览
五、QA
作者简介:电类领域优质创作者、多年架构师设计经验、多年校企合作经验,被多个学校常年聘为校外企业导师,指导学生毕业设计并参与学生毕业答辩指导,有较为丰富的相关经验。期待与各位高校教师、企业讲师以及同行交流合作
主要内容:人工智能与大数据、单片机/PLC开发、Matlab物联网设计与开发设计、学习资料、面试题库、技术互助、就业指导等
业务范围:指导功能设计、开题报告、任务书、文献综述、系统功能实现、代码编写、论文编写和辅导、论文降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路等。
收藏点赞关注作者
一、摘要
在工业科技迅速发展的今天,在生产线上机械手逐渐取代了人工进行作业。机械手可以与履带式小车、传送带等结合形成多功能的机械设备,可以实现对物品的分拣、筛选和装配等作业,因此机械手具有广阔应用前景和很高的研究价值。
本文提出了六自由度机械手的设计方案与思路。六自由度机械手硬件电路设计包括主控电路、电机驱动电路、电机稳压电路、无线通信电路等。硬件设计以Arduino硬件平台为核心部件,采用PWM技术对机械手的启停、速度和方向进行控制,舵机驱动板和蓝牙模块是模拟人手臂的机械手控制系统。软件设计在Arduino IDE中编译机械手运动控制程序,手机和蓝牙模块之间通过安卓手机发送控制指令并返回命令状态。利用安卓手机发送控制命令,蓝牙模块接收到来自手机的指令后,通过串口把信号传给Arduino Mega328控制板,Arduino Mega328控制板做出判断后,将信号传给舵机驱动板驱动舵机转动,实现机械手对指定物体的抓取。同时为了准确的抓取物体,该机械手采用六个自由度的设计,臂可以旋转、俯仰、伸缩以及钳子的闭合,与四自由度机械手相比,六自由度机械手更加灵活精确度更高,其六个舵机之间相互配合,可以在复杂多变的环境中完成作业任务。
关键词**:**六自由度;Arduino;舵机;蓝牙
二、设计要求
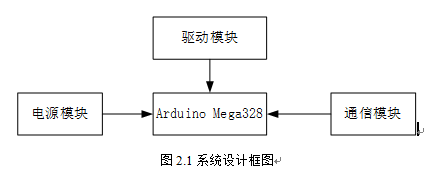
机械手一般是由执行系统、控制系统和驱动系统三大部分构成,总体结构设计要按照先后顺序完成相应模块工作内容10。底座、支架和手腕构成了机械手的执行系统,用于调整机械手的位置和方向。底座的设计通常是固定的,它是机械手的根基部分,可以固定于平台上,作用是承担整个手臂的负载,以保证其作业的稳定性。控制系统采用Arduino Mega328控制板,根据机械手每个手臂的运动要求,控制机械手臂运动的方向和角度,以实现机械手具有六个自由度要求的特定运动。驱动系统则是通过输出一个PWM波来控制舵机的旋转角度来调整每个关节所在的位置,实现对空间位置物体的抓取11。主控系统是数据的处理中心,当需要改变机械手臂的位置时,通过蓝牙或手柄发出控制信号,主控系统将接收到的控制信号进行处理和判断,并将处理后的控制信号传递给驱动系统,驱动系统接收命令控制相应的舵机转动指定的角度,从而达到控制机械手抓取物体的目的。驱动系统包含了六个舵机,每个舵机分别用于模拟执行机械手臂的动作。驱动系统中的六个舵机可分别进行控制,使六个舵机之间相互配合,根据指定的命令做出相应的动作,进而完善对机械手臂六个自由度的调整控制12。系统设计框图如图2.1所示。
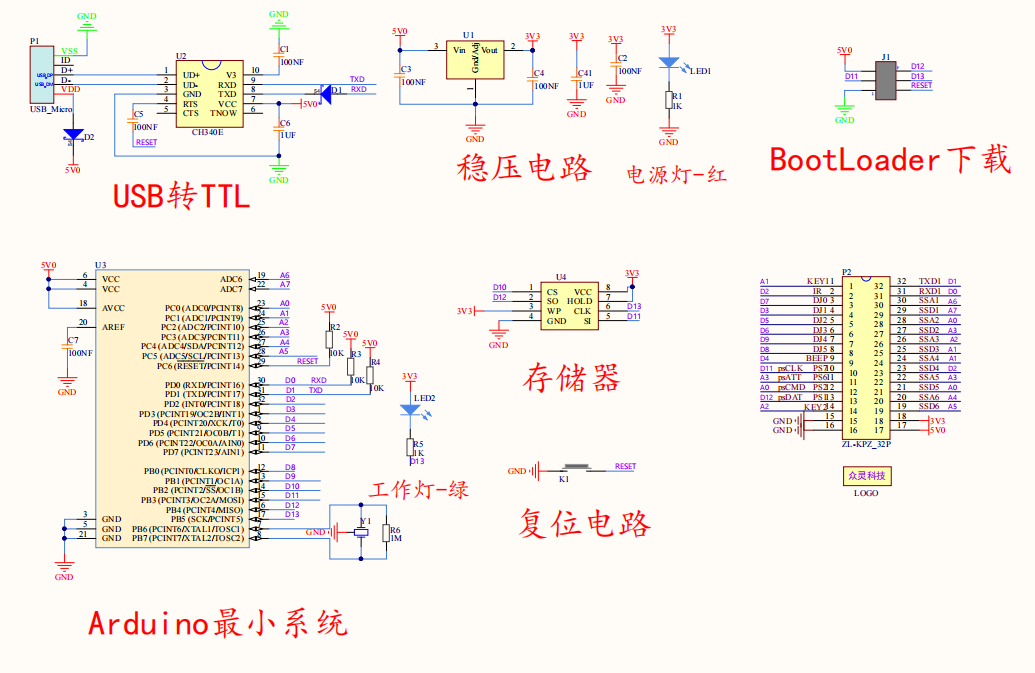
三、原理图
四、说明书预览(16433字)
五、如果学弟学妹们在毕设方面有任何问题,随时可以私信我咨询哦,有问必答!学长专注于单片机相关的知识,可以解决单片机设计、嵌入式系统、编程和硬件等方面的难题。愿毕业生有力,陪迷茫着前行!
通过网盘分享的文件:资料.rar
链接: https://pan.baidu.com/s/1oAaq4r_ZbdVjRvQsAA8r5g 提取码: BYSJ