卡尔曼滤波(Kalman Filter)是一种在控制系统和信号处理领域广泛应用的递推滤波算法,能够在噪声环境下对动态系统的状态进行最优估计。其广泛应用于导航、目标跟踪、图像处理、经济预测等多个领域。本文将详细介绍卡尔曼滤波在LabVIEW中的作用、意义及其使用方法。
卡尔曼滤波的基本原理
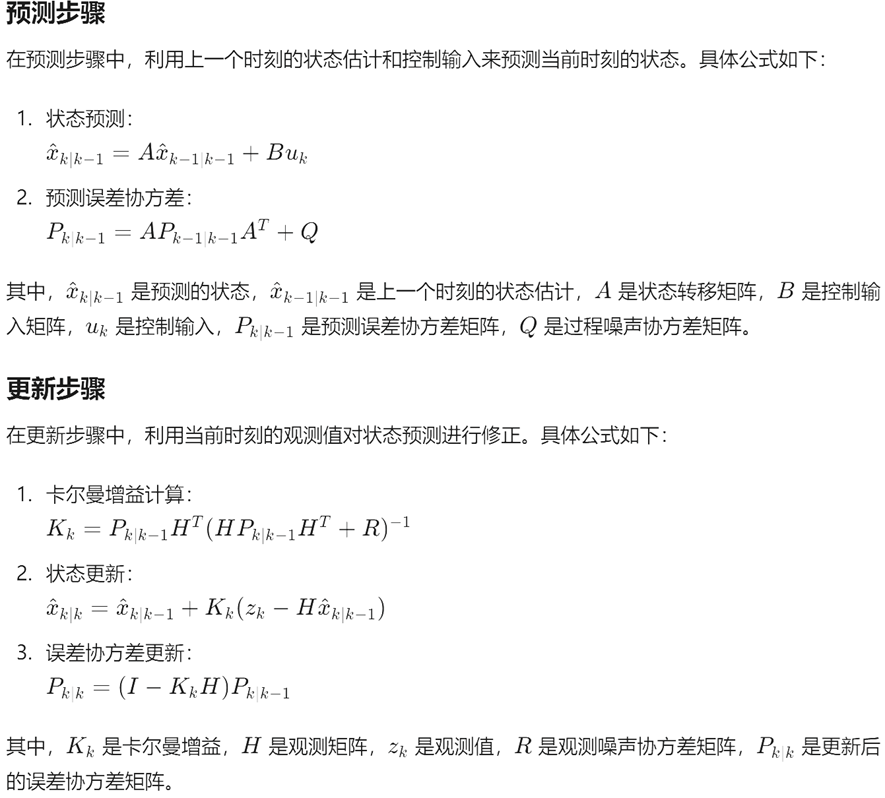
卡尔曼滤波是通过最小化估计误差的协方差来实现对系统状态的最优估计。它假设系统是线性、时变的,且噪声满足高斯分布。卡尔曼滤波由两个主要步骤组成:预测和更新。
卡尔曼滤波在LabVIEW中的应用
意义与优势
-
实时性强:卡尔曼滤波能够在实时系统中高效地进行状态估计,适用于动态变化的系统。
-
抗噪声能力强:卡尔曼滤波通过最优估计,能够在噪声环境下有效提取系统的真实状态。
-
广泛应用:卡尔曼滤波在自动控制、导航定位、经济预测等多个领域有着广泛的应用前景。
LabVIEW 中的卡尔曼滤波
LabVIEW作为一种图形化编程语言,提供了强大的数据处理和分析功能,用户可以通过图形化编程实现卡尔曼滤波。LabVIEW中实现卡尔曼滤波主要涉及以下几个步骤:
-
初始化:设定初始状态估计、误差协方差矩阵、过程噪声协方差矩阵和观测噪声协方差矩阵等参数。
-
预测步骤:根据系统模型和控制输入,计算预测状态和预测误差协方差矩阵。
-
更新步骤:利用当前观测值,计算卡尔曼增益,并更新状态估计和误差协方差矩阵。
-
循环迭代:重复进行预测和更新步骤,实现对系统状态的实时估计。
注意事项
-
参数选择:过程噪声协方差矩阵 QQQ 和观测噪声协方差矩阵 RRR 的选择对卡尔曼滤波的性能有重要影响,通常需要根据实际情况进行调整和优化。
-
数值稳定性:在计算卡尔曼增益和更新误差协方差时,需要注意矩阵运算的数值稳定性,避免出现矩阵奇异或不稳定的情况。
-
实时性:在实时系统中,需要确保卡尔曼滤波的计算速度能够满足系统的实时性要求,避免因计算延迟导致的估计误差。
结论
卡尔曼滤波作为一种强大的递推滤波算法,在噪声环境下能够实现对动态系统状态的最优估计。本文详细介绍了卡尔曼滤波的基本原理及其在LabVIEW中的应用方法。通过LabVIEW的图形化编程环境,用户可以方便地实现卡尔曼滤波,并应用于实际系统中。通过合理选择系统模型和滤波参数,卡尔曼滤波能够在导航、控制、信号处理等多个领域发挥重要作用,提高系统的性能和可靠性。