47转置卷积

python
import torch
from torch import nn
from d2l import torch as d2l
# 输入矩阵X和卷积核矩阵K实现基本的转置卷积运算
def trans_conv(X, K):
h, w = K.shape
Y = torch.zeros((X.shape[0] + h - 1, X.shape[1] + w - 1))
for i in range(X.shape[0]):
for j in range(X.shape[1]):
Y[i: i + h, j: j + w] += X[i, j] * K
return Y
X = torch.tensor([[0.0, 1.0], [2.0, 3.0]])
K = torch.tensor([[0.0, 1.0], [2.0, 3.0]])
print(trans_conv(X, K))
"""
tensor([[ 0., 0., 1.],
[ 0., 4., 6.],
[ 4., 12., 9.]])
"""
# 使用高级API获得相同的结果
X, K = X.reshape(1, 1, 2, 2), K.reshape(1, 1, 2, 2)
tconv = nn.ConvTranspose2d(1, 1, kernel_size=2, bias=False)
tconv.weight.data = K
print(tconv(X))
"""
tensor([[[[ 0., 0., 1.],
[ 0., 4., 6.],
[ 4., 12., 9.]]]], grad_fn=<SlowConvTranspose2DBackward>)
"""
# 填充、步幅和多通道
# 当将高和宽两侧的填充数指定为1时,转置卷积的输出中将删除第一和最后的行与列。
tconv = nn.ConvTranspose2d(1, 1, kernel_size=2, padding=1, bias=False)
tconv.weight.data = K
print(tconv(X))
# tensor([[[[4.]]]], grad_fn=<SlowConvTranspose2DBackward>)
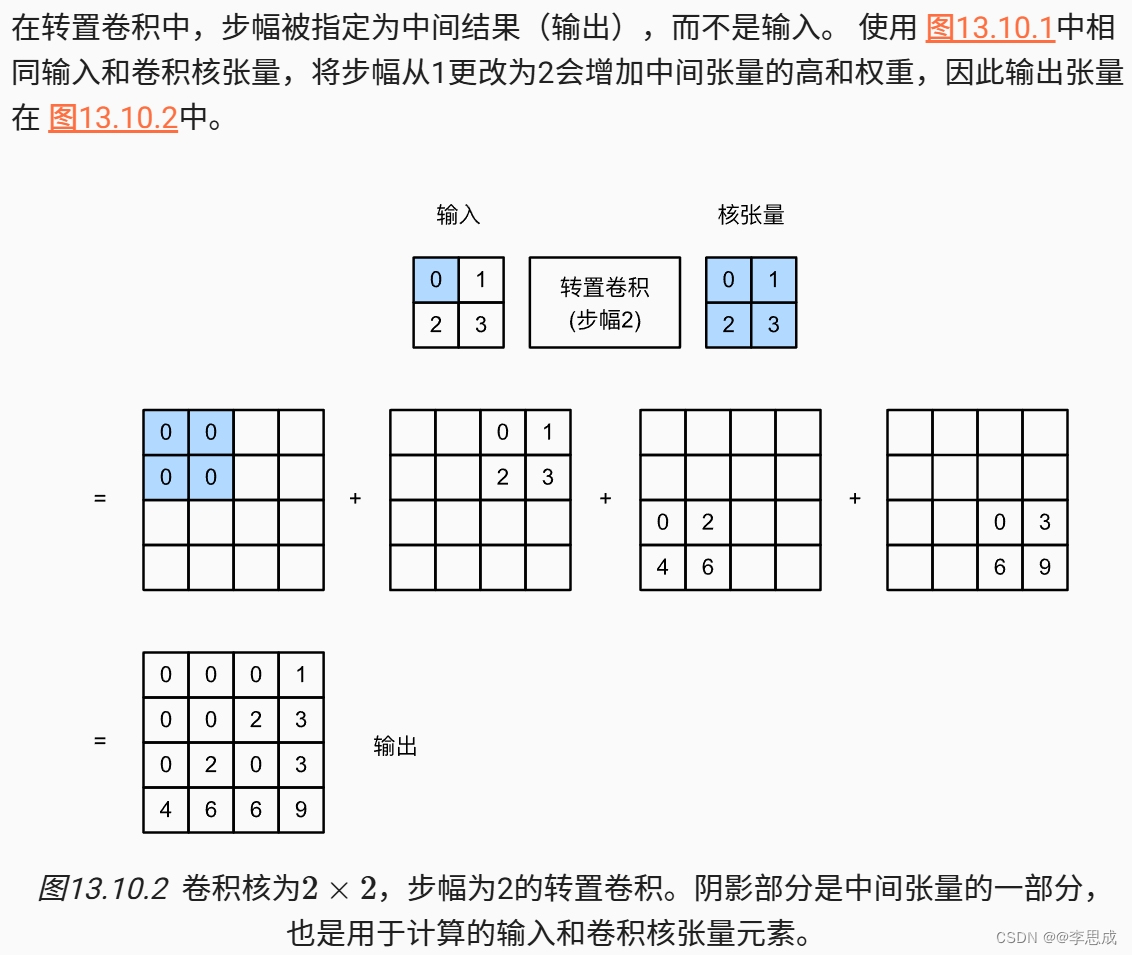
# 步幅为2的转置卷积的输出
tconv = nn.ConvTranspose2d(1, 1, kernel_size=2, stride=2, bias=False)
tconv.weight.data = K
print(tconv(X))
"""
tensor([[[[0., 0., 0., 1.],
[0., 0., 2., 3.],
[0., 2., 0., 3.],
[4., 6., 6., 9.]]]]
"""
X = torch.rand(size=(1, 10, 16, 16))
conv = nn.Conv2d(10, 20, kernel_size=5, padding=2, stride=3)
tconv = nn.ConvTranspose2d(20, 10, kernel_size=5, padding=2, stride=3)
print(conv(X).shape) # torch.Size([1, 20, 6, 6])
print(tconv(conv(X)).shape) # torch.Size([1, 10, 16, 16])
print(tconv(conv(X)).shape == X.shape) # True
# 与矩阵变换的联系
X = torch.arange(9.0).reshape(3, 3)
K = torch.tensor([[1.0, 2.0], [3.0, 4.0]])
Y = d2l.corr2d(X, K)
print(Y)
"""
tensor([[27., 37.],
[57., 67.]])
"""
# 将卷积核K重写为包含大量0的稀疏权重矩阵W。 权重矩阵的形状是4 * 9
def kernel2matrix(K):
k, W = torch.zeros(5), torch.zeros((4, 9))
k[:2], k[3:5] = K[0, :], K[1, :]
W[0, :5], W[1, 1:6], W[2, 3:8], W[3, 4:] = k, k, k, k
return W
W = kernel2matrix(K)
print(W)
"""
tensor([[1., 2., 0., 3., 4., 0., 0., 0., 0.],
[0., 1., 2., 0., 3., 4., 0., 0., 0.],
[0., 0., 0., 1., 2., 0., 3., 4., 0.],
[0., 0., 0., 0., 1., 2., 0., 3., 4.]])
"""
print(Y == torch.matmul(W, X.reshape(-1)).reshape(2, 2))
"""
tensor([[True, True],
[True, True]])
"""
# 使用矩阵乘法来实现转置卷积
Z = trans_conv(Y, K)
print(Z == torch.matmul(W.T, Y.reshape(-1)).reshape(3, 3))
"""
tensor([[True, True, True],
[True, True, True],
[True, True, True]])
"""