本文目录
- 一、差速轮式机器人
- 二、差速驱动机器人运动学模型
- 三、对外接口
-
- [3.1 输入接口](#3.1 输入接口)
- [3.2 输出接口](#3.2 输出接口)
- 四、控制器参数
- 五、配置控制器参数
- 六、编写硬件抽象接口
- 七、控制机器人移动
- 八、源码
ros_control 提供了多种控制器,其中 diff_drive_controller 用于控制差速驱动轮式机器人。
一、差速轮式机器人
差速轮式机器人是一种移动机器人,其运动基于机器人身体两侧的两个独立驱动轮。因此,它可以通过改变轮子的相对旋转速度来改变方向,不需要额外的转向运动。具有这种驱动器的机器人通常有一个或多个脚轮,以防止车辆倾斜。
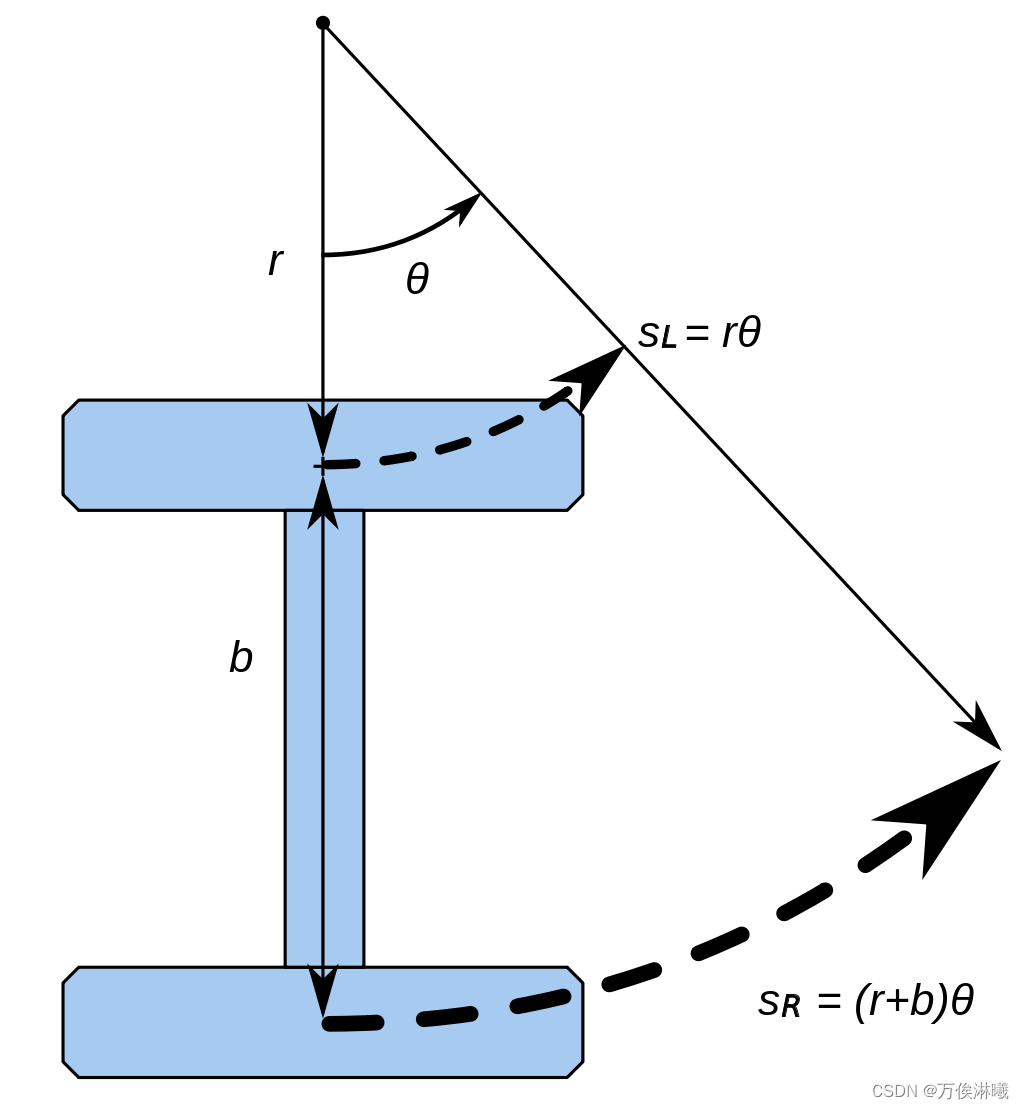
如果两个轮子以相同的方向和速度驱动,机器人将沿直线行驶。如果两个轮子以相同的速度朝相反的方向转动,如所示图所示,机器人将绕轴的中心点旋转。否则,根据旋转速度和方向,旋转中心可能落在由两个轮胎接触点定义的线上的任何位置。当机器人沿直线行驶时,旋转中心距离机器人无限远。由于机器人的方向取决于两个驱动轮的旋转速度和方向,因此应精确感测和控制这些量。
差速转向机器人与汽车中使用的差速 齿轮类似,两个车轮可以有不同的转速,但与差速齿轮系统不同,差速转向系统将为两个车轮提供动力。差速轮式机器人在机器人技术中得到广泛应用,因为它们的运动易于编程并且可以很好地控制。当今市场上几乎所有的消费机器人都使用差速转向,主要是因为它成本低且简单。
二、差速驱动机器人运动学模型
如下图为轮式机器人的差速驱动运动学模型示意图:
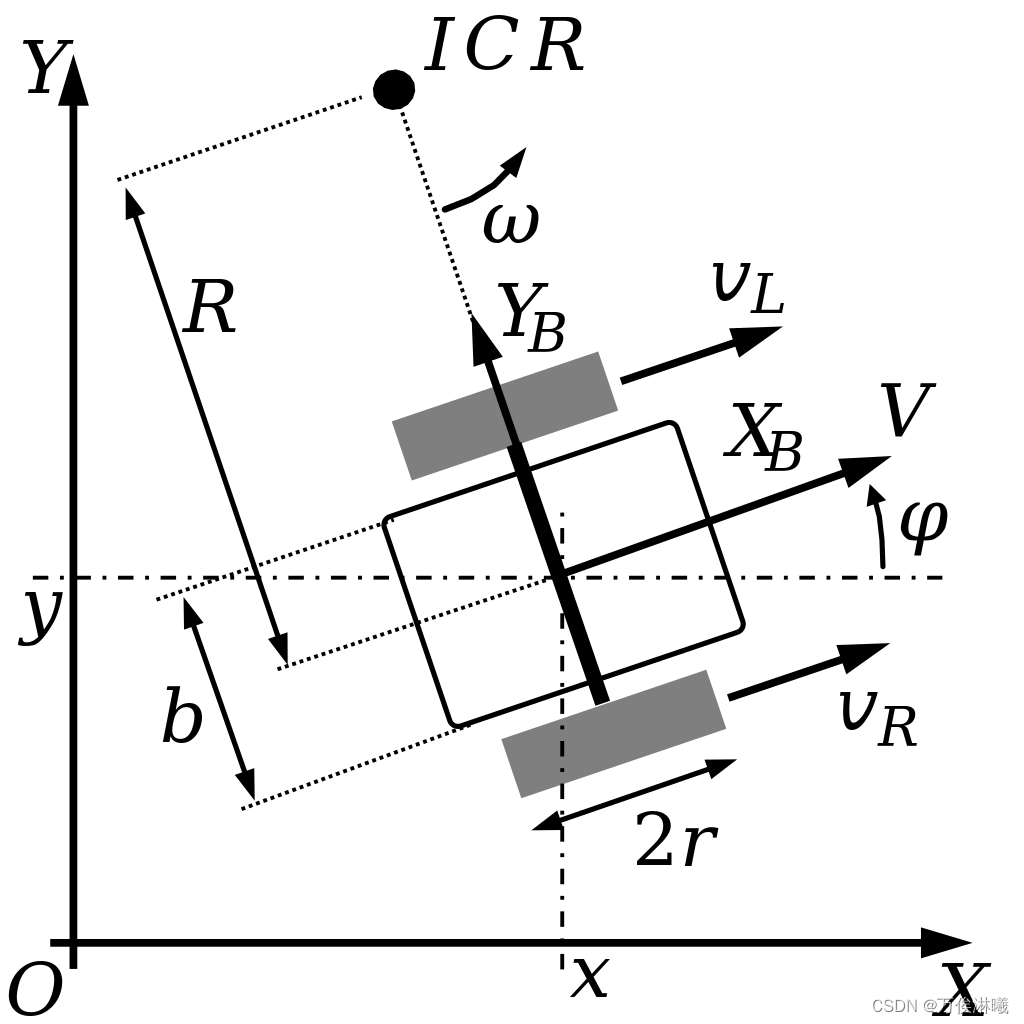
其中,
V − 机器人线速度 ω − 机器人角速度 X O Y − 世界坐标系 X B Y B − 机器人坐标系 φ − 机器人在世界坐标系的角度 r − 车轮半径 b − 轮距 I C R − 瞬时旋转中心 R − 瞬心到机器人中心的距离 v L , v R − 左右轮接地点切向线速度 ω L , ω R − 左右轮角速度 V - 机器人线速度\\ \omega - 机器人角速度\\ XOY - 世界坐标系\\ X_BY_B - 机器人坐标系\\ \varphi - 机器人在世界坐标系的角度\\ r - 车轮半径\\ b - 轮距\\ ICR - 瞬时旋转中心\\ R - 瞬心到机器人中心的距离\\ v_L,v_R - 左右轮接地点切向线速度\\ \omega_L,\omega_R - 左右轮角速度 V−机器人线速度ω−机器人角速度XOY−世界坐标系XBYB−机器人坐标系φ−机器人在世界坐标系的角度r−车轮半径b−轮距ICR−瞬时旋转中心R−瞬心到机器人中心的距离vL,vR−左右轮接地点切向线速度ωL,ωR−左右轮角速度
有如下关系:
ω ⋅ ( R + b / 2 ) = v R ω ⋅ ( R − b / 2 ) = v L \omega \cdot (R + b/2) = v_R\\ \omega \cdot (R - b/2) = v_L ω⋅(R+b/2)=vRω⋅(R−b/2)=vL
解这两个方程可得 ω \omega ω 和 R R R :
ω = ( v R − v L ) / b R = b / 2 ⋅ ( v R + v L ) / ( v R − v L ) \omega = (v_R-v_L)/b\\ R = b/2 \cdot(v_R+v_L)/(v_R-v_L) ω=(vR−vL)/bR=b/2⋅(vR+vL)/(vR−vL)
利用角速度方程可得机器人瞬时速度 V V V :
V = ω ⋅ R = ( v R + v L ) / 2 V = \omega \cdot R = (v_R+v_L)/2 V=ω⋅R=(vR+vL)/2
车轮切向速度也可以写成:
v R = r ⋅ ω R v L = r ⋅ ω L v_R = r \cdot \omega_R\\ v_L = r \cdot \omega_L vR=r⋅ωRvL=r⋅ωL
则机器人在本体坐标系中的运动学模型为:
x ˙ B y ˙ B φ ˙ \] = \[ v ⋅ x B v ⋅ y B ω \] = ⏞ v = r ω \[ r 2 r 2 0 0 − r b r b \] \[ ω L ω R \] \\begin{bmatrix} \\dot{x}_B \\\\ \\dot{y}_B \\\\ \\dot{\\varphi} \\end{bmatrix} = \\begin{bmatrix} v \\cdot x_B \\\\ v \\cdot y_B \\\\ \\omega \\end{bmatrix} \\overbrace{=}\^{v=r\\omega} \\begin{bmatrix} \\frac r2 \& \\frac r2 \\\\ 0 \& 0 \\\\ -\\frac rb \& \\frac rb \\end{bmatrix} \\begin{bmatrix} \\omega_L \\\\ \\omega_R \\end{bmatrix} x˙By˙Bφ˙ = v⋅xBv⋅yBω = v=rω 2r0−br2r0br \[ωLωR
再通过坐标变换,最终可以得到机器人在世界坐标中的运动学模型:
x ˙ y ˙ φ ˙ \] = \[ cos φ 0 sin φ 0 0 1 \] \[ V ω \] \\begin{bmatrix} \\dot{x} \\\\ \\dot{y} \\\\ \\dot{\\varphi} \\end{bmatrix} = \\begin{bmatrix} \\cos\\varphi \& 0 \\\\ \\sin\\varphi \& 0 \\\\ 0 \& 1 \\end{bmatrix} \\begin{bmatrix} V \\\\ \\omega \\end{bmatrix} x˙y˙φ˙ = cosφsinφ0001 \[Vω
其中, V V V 和 ω \omega ω 为控制变量。
通常我们需要通过机器人的速度和结构参数逆解出左右轮的转速,用于控制电机。在这种情况下,可以很容易地重新表述前面提到的方程。使用如下方程:
R = V / ω ω R = v R / r ω L = v L / r R = V/\omega\\ \omega_R = v_R/r\\ \omega_L = v_L/r R=V/ωωR=vR/rωL=vL/r
可得左右轮角速度方程:
ω R = V + ω ⋅ b / 2 r ω L = V − ω ⋅ b / 2 r \omega_R = \frac{V+\omega \cdot b/2}{r} \\ \omega_L = \frac{V-\omega \cdot b/2}{r} ωR=rV+ω⋅b/2ωL=rV−ω⋅b/2
三、对外接口
diff_drive_controller 主要通过订阅速度命令作为模块的输入,然后解析运动学模型控制电机,达到控制机器人的目的。
3.1 输入接口
-
cmd_vel(geometry_msgs/Twist)
位于控制器的命名空间下,给机器人发布速度
3.2 输出接口
-
odom(nav_msgs/Odometry)
位于控制器的命名空间下,根据硬件反馈计算的里程计信息
-
/tf(tf/tfMessage)
从 odom 转换为 base_link
-
cmd_vel_out(geometry_msgs/TwistStamped)
当
publish_cmd参数设置为True时可用。在控制器的输入上应用限制器后的 Twist。
四、控制器参数
diff_drive_controller 提供了一些参数,用于配置机器人控制。
| 参数 | 数据类型 | 说明 |
|---|---|---|
| left_wheel | string /string... | 左轮关节名称或关节名称列表 |
| right_wheel | string /string... | 右轮关节名称或关节名称列表 |
| pose_covariance_diagonal | double6 | 用于里程计位姿发布的协方差矩阵的对角线 |
| twist_covariance_diagonal | double6 | 用于里程计 twist 发布的协方差矩阵的对角线 |
| publish_rate | double | 发布里程计的频率,用于 tf 和 odom(单位:Hz,默认值: 50.0) |
| wheel_separation | double | 轮距,左轮和右轮之间的距离。如果未指定此参数,diff_drive_controller 将尝试从 URDF 读取值 |
| wheel_separation_multiplier | double | 轮距参数的系数。用于解释机器人模型和真实机器人之间的差异。(默认值:1.0) |
| wheel_radius | double | 车轮半径。默认两侧车轮都具有相同的尺寸。如果未指定此参数,diff_drive_controller 将尝试从 URDF 读取值。 |
| wheel_radius_multiplier | double | 车轮半径参数的系数。用于解释机器人模型和真实机器人之间的差异。(默认值:1.0) |
| cmd_vel_timeout | double | 两个连续速度命令之间允许的时间间隔。此延迟后,将向车轮发送零速命令。(单位:s,默认值:0.5) |
| base_frame_id | string | 用于填充Odometry消息和TF的child_frame_id(默认值:"base_link") |
| linear | object | 线性速度配置参数 |
| + x | object | x轴,两轮差速机器人线速度只有x轴 |
| ++ has_velocity_limits | bool | 控制器是否限制线速度。(默认值: false) |
| ++ max_velocity | double | 最大线速度(单位:m/s) |
| ++ min_velocity | double | 最小线速度(单位:m/s)。未指定时,使用max_velocity |
| ++ has_acceleration_limits | bool | 控制器是否限制线加速度。(默认值: false) |
| ++ max_acceleration | double | 最大线加速度(单位:m/s^2) |
| ++ min_acceleration | double | 最小线加速度(单位:m/s^2)。未指定时,使用max_acceleration |
| ++ has_jerk_limits | bool | 控制器是否限制线加速度的变化快慢(默认值: false) |
| ++ max_jerk | double | 最大 jerk(单位:m/s^3) |
| angular | object | 角速度配置参数 |
| + z | object | z轴,两轮差速机器人角速度只有z轴 |
| ++ has_velocity_limits | bool | 控制器是否应该限制角速度(默认值: false) |
| ++ max_velocity | double | 最大角速度(单位:rad/s) |
| ++ min_velocity | double | 最小角速度(单位:rad/s)。将其设置为 0.0 将禁用逆时针旋转。未指定时,将使用max_velocity |
| ++ has_acceleration_limits | bool | 控制器是否应该限制角加速度(默认值: false) |
| ++ max_acceleration | double | 最大角加速度(单位:rad/s^2) |
| ++ min_acceleration | double | 最小角加速度(单位为 rad/s^2)。未指定时,使用max_acceleration。 |
| ++ has_jerk_limits | bool | 控制器是否限制角加速度的变化快慢(默认值: false) |
| ++ max_jerk | double | 最大 jerk(单位:rad/s^3) |
| enable_odom_tf | bool | 是否直接发布到 TF(默认值: true ) |
| odom_frame_id | string | 里程计的frame_id(默认值:"/odom") |
| publish_cmd | bool | 发布要执行的速度命令。用于监控限制器对控制器输入的影响。(默认值: False) |
| allow_multiple_cmd_vel_publishers | bool | 将其设置为 true 将允许输入接口 ~/cmd_vel 有多个发布者。如果将其设置为 false,则如果 ~/cmd_vel 有多个发布者,则会导致控制器停止运行。(默认值: False) |
| velocity_rolling_window_size | int | 用于计算里程计 twist.linear.x 和 twist.angular.z 速度的平均速度样本数量(默认值: 10) |
五、配置控制器参数
最小配置示例(即必要配置项):
yaml
diff_drive_controller:
type: "diff_drive_controller/DiffDriveController"
left_wheel: "left_wheel_joint"
right_wheel: "right_wheel_joint"
pose_covariance_diagonal: [0.001, 0.001, 0.001, 0.001, 0.001, 0.03]
twist_covariance_diagonal: [0.001, 0.001, 0.001, 0.001, 0.001, 0.03]该差速轮式机器人完整配置:
yaml
# 用于控制器硬件接口配置
hardware_interface:
joints:
- left_wheel_joint
- right_wheel_joint
- front_caster_joint
- back_caster_joint
# joint_state_controller 控制器,用于发布各关节状态
joint_state_controller:
type: "joint_state_controller/JointStateController"
publish_rate: 50
# diff_drive_controller 控制器
diff_drive_controller:
type: "diff_drive_controller/DiffDriveController"
left_wheel: "left_wheel_joint"
right_wheel: "right_wheel_joint"
publish_rate: 50
pose_covariance_diagonal: [0.001, 0.001, 0.001, 0.001, 0.001, 0.03]
twist_covariance_diagonal: [0.001, 0.001, 0.001, 0.001, 0.001, 0.03]
cmd_vel_timeout: 100
velocity_rolling_window_size: 1
publish_cmd: true
base_frame_id: base_link
enable_odom_tf: true
odom_frame_id: odom
# 轮间距和轮半径
wheel_separation: 0.38
wheel_radius: 0.06
wheel_separation_multiplier: 1.0
wheel_radius_multiplier: 1.0
# 速度和加速度限制
linear:
x:
has_velocity_limits: true
max_velocity: 1.0 # m/s
has_acceleration_limits: true
max_acceleration: 3.0 # m/s^2
angular:
z:
has_velocity_limits: true
max_velocity: 2.0 # rad/s
has_acceleration_limits: true
max_acceleration: 6.0 # rad/s^2六、编写硬件抽象接口
下面写一个两轮差速硬件接口,使用速度控制接口 VelocityJointInterface 控制 joint 的速度,使用 JointStateInterface 获取 joint 的位置、速度、力等信息。
硬件抽象接口头文件:diff_drive_hardware_interface.h
cpp
#ifndef DIFF_DRIVE_HARDWARE_INTERFACE_H
#define DIFF_DRIVE_HARDWARE_INTERFACE_H
#include <ros/ros.h>
#include <hardware_interface/joint_command_interface.h>
#include <hardware_interface/joint_state_interface.h>
#include <hardware_interface/robot_hw.h>
#include <controller_manager/controller_manager.h>
class DiffDriveHWInterface : public hardware_interface::RobotHW
{
public:
struct JointInfo
{
std::string name;
double cmd;
double pos;
double vel;
double eff;
JointInfo() : name(""), cmd(0.0), pos(0.0), vel(0.0), eff(0.0)
{}
JointInfo(std::string name_)
: name(name_), cmd(0.0), pos(0.0), vel(0.0), eff(0.0)
{}
JointInfo(std::string name_, double cmd_, double pos_, double vel_, double dff_)
: name(name_), cmd(cmd_), pos(pos_), vel(vel_), eff(dff_)
{}
};
public:
DiffDriveHWInterface(ros::NodeHandle &nh);
void init();
void read(const ros::Duration &period);
void write(const ros::Duration &period);
private:
ros::NodeHandle m_nh;
hardware_interface::JointStateInterface m_jnt_state_interface;
hardware_interface::VelocityJointInterface m_jnt_vel_interface;
std::vector<JointInfo> m_joints;
};
#endif // DIFF_DRIVE_HARDWARE_INTERFACE_H源文件:diff_drive_hardware_interface.cpp
cpp
#include "diff_drive_control/diff_drive_hardware_interface.h"
DiffDriveHWInterface::DiffDriveHWInterface(ros::NodeHandle &nh) : m_nh(nh)
{
}
/**
* @brief 初始化关节信息
* 注册抽象硬件接口
*
*/
void DiffDriveHWInterface::init()
{
std::vector<std::string> joint_names;
m_nh.getParam("/hardware_interface/joints", joint_names);
for (std::string name : joint_names)
{
m_joints.push_back(JointInfo(name));
}
for (auto &joint : m_joints)
{
ROS_INFO("get joint: %s", joint.name.c_str());
// Initialize hardware interface
hardware_interface::JointStateHandle state_handle(joint.name, &joint.pos, &joint.vel, &joint.eff);
m_jnt_state_interface.registerHandle(state_handle);
hardware_interface::JointHandle vel_handle(m_jnt_state_interface.getHandle(joint.name), &joint.cmd);
m_jnt_vel_interface.registerHandle(vel_handle);
}
registerInterface(&m_jnt_state_interface);
registerInterface(&m_jnt_vel_interface);
}
void DiffDriveHWInterface::read(const ros::Duration &period)
{
// Read the state of the hardware (e.g., from sensors)
}
void DiffDriveHWInterface::write(const ros::Duration &period)
{
// Send the command to the hardware (e.g., to actuators)
for (auto &joint : m_joints)
{
joint.pos += joint.vel * period.toSec();
// if (joint.vel != joint.cmd)
// {
// ROS_INFO("write, joint: %s, cmd: %lf", joint.name.c_str(), joint.cmd);
// }
joint.vel = joint.cmd;
}
}控制节点:diff_drive_control_node.cpp
cpp
#include <ros/ros.h>
#include <controller_manager/controller_manager.h>
#include "diff_drive_control/diff_drive_hardware_interface.h"
int main(int argc, char **argv)
{
ros::init(argc, argv, "diff_drive_control_node");
ros::NodeHandle nh;
DiffDriveHWInterface diff_drive(nh);
diff_drive.init();
controller_manager::ControllerManager cm(&diff_drive, nh);
ros::Rate rate(50.0);
ros::AsyncSpinner spinner(1);
spinner.start();
while (ros::ok())
{
ros::Duration period = rate.expectedCycleTime();
diff_drive.write(period);
cm.update(ros::Time::now(), period);
rate.sleep();
}
return 0;
}七、控制机器人移动
机器人模型与硬件接口都准备好了,接下来开始编写业务代码控制机器人。
我们仅给机器人发送速度指令,模拟机器人移动任务,如下:
cpp
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
geometry_msgs::Twist moveRobot(const double& linear, const double& angular)
{
geometry_msgs::Twist msg;
msg.linear.x = linear; // 线速度
msg.linear.y = 0.0;
msg.linear.z = 0.0;
msg.angular.x = 0.0;
msg.angular.y = 0.0;
msg.angular.z = angular; // 角速度
ROS_INFO("moveRobot, linear: %.3lf, angular: %.1lf", linear, angular*180/M_PI);
return msg;
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "diff_drive_business");
ros::NodeHandle nh;
ros::Publisher velPub = nh.advertise<geometry_msgs::Twist>("/diff_drive_controller/cmd_vel", 10);
ros::Rate rate(10);
while (ros::ok())
{
velPub.publish(moveRobot(0.5, 0));
ros::Duration(3.0).sleep();
velPub.publish(moveRobot(0, 1.57));
ros::Duration(1.0).sleep();
rate.sleep();
}
return 0;
}编译执行该节点,在rviz中的可视化结果如下: