文章目录
之前有过一篇关于清晰度的判断的文章: python的opencv操作记录(九)------图像清晰度计算。
这一篇里面主要说的是用sobel算子,或者是拉普拉斯算子来进行梯度的计算,根据清晰的图像梯度更大的逻辑来判断图像的清晰度。
不过这种算法有一个问题,就是整个图像是有足够的信息来提供梯度,或者换句话说,图像大部分区域都是有效区域。
在实际项目中,碰到一种拍摄细胞的情况,需要对细胞对焦过程中的图像进行清晰度判断:
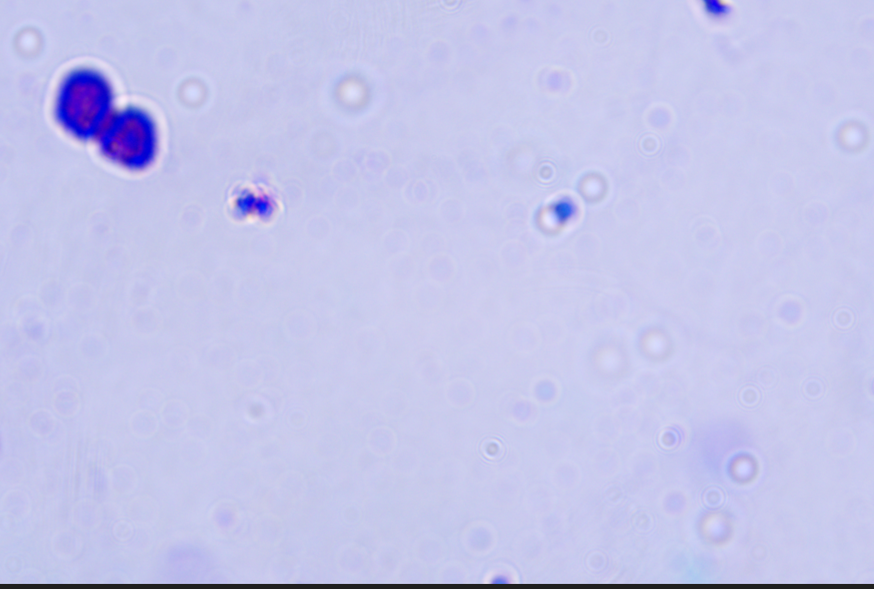
对于这种情况,直接计算图像的梯度,是不太有效果的,因为整个图像大部分区域的梯度都是一样的(模糊的,清晰的,只有小部分区域会有一些梯度差别),所以直接计算整图的梯度方式是无效的。
所以必须用别的办法。
提取ROI
既然不能直接对整张图像进行计算,那么首先就是提取ROI:
基本逻辑:
- 转换灰度图
- 阈值化,我这里用的是THRESH_BINARY_INV
- 找轮廓
- 求轮廓的外接RECT
当然,在具体的过程中,还可以加一些形态学的方法,比如膨胀,腐蚀之类。
cv::Mat getMasks(cv::Mat img)
{
cv::Mat kernel, gray;
vector<cv::Mat> contours;
if (img.channels() == 3)
{
cv::cvtColor(img, gray, cv::COLOR_RGB2GRAY);
}
cv::threshold(gray, gray, 100, 255, cv::THRESH_BINARY_INV);
cv::findContours(gray, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE);
cv::Rect bestRect;
int maxRectArea = -1;
if (contours.size() == 0)
{
img = cv::Mat::zeros(cv::Size(1, 1), CV_8UC1);
return img;
}
for(int i = 0; i < contours.size(); i++)
{
cv::Scalar color(0, 255, 0);
cv::Rect rect = cv::boundingRect(contours[i]);
if (rect.width * rect.height > maxRectArea)
{
maxRectArea = rect.width * rect.height;
bestRect = rect;
//cv::rectangle(img, rect, color, 1);
}
}
cv::Mat roi(img, bestRect);
return roi;
}判断清晰度
提取出有效区域之后,就开始尝试用各种办法来进行判断了。最关键的是下面两张:
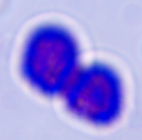

这两张图,从人眼来分辨的话,是后者比较清晰。但是如果直接使用求梯度的方案的话,前面一张的梯度会比较高,因为外面有一圈光圈一样的东西,造成了梯度反而比较高。
灰度共轭矩阵(GLCM)
首先尝试了一些提取特征的方案,第一个就是灰度共轭矩阵的计算:
灰度共轭函数的简单原理:
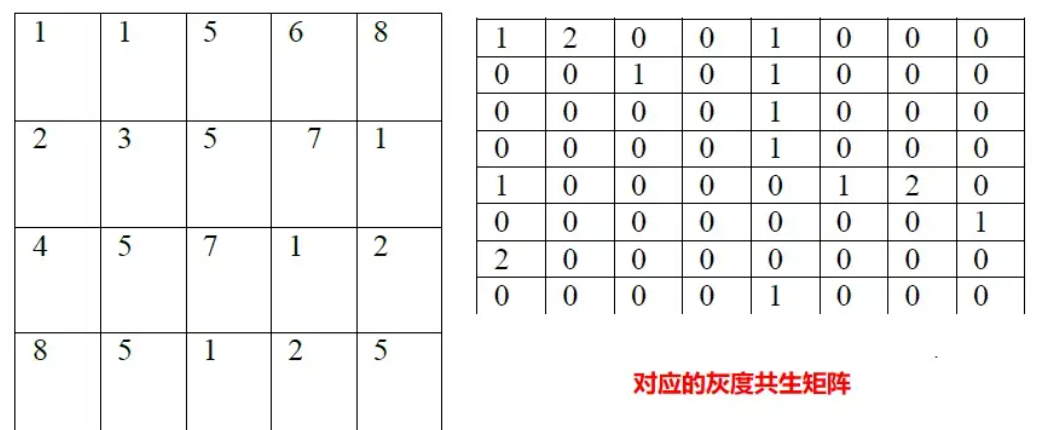
- 几个关键概念,根据相邻像素点之间距离参数D不同可以得到不同距离的GLCM。此外对正常的灰度图像来说,最小灰度值为0,最大的灰度值为255,共计256个灰度级别,所以GLCM的大小为256x256,但是我们可以对灰度级别进行降维操作,比如可以每8个灰度值表示一个level这样,这样原来256x256大小的共生矩阵就可以改成256/8 * 256 /8 = 32x32的共生矩阵。所以最终影响灰度共生矩阵生成有三个关键参数:
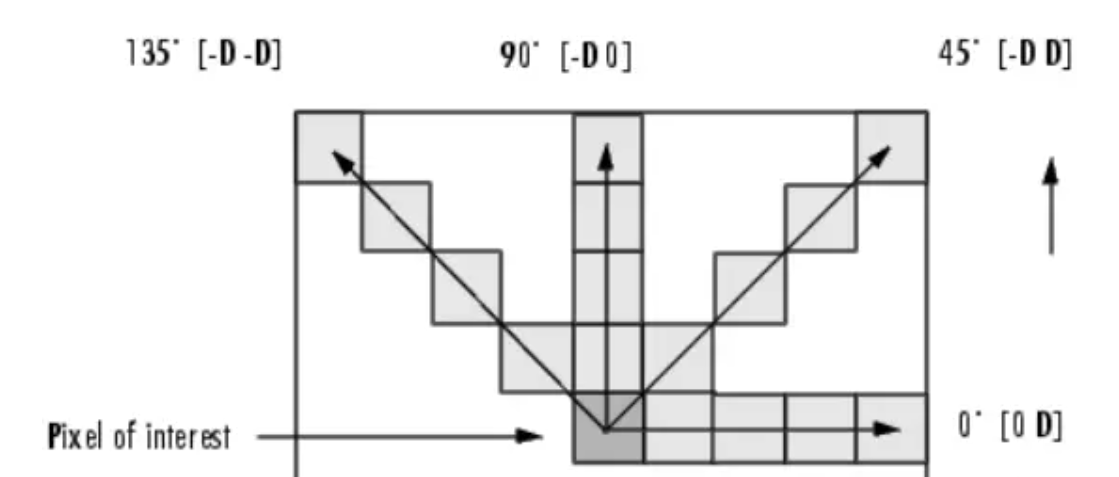
- 角度 (支持0、45、90、135)
- 距离(大于等于1个像素单位)
- 灰度级别(最大GLCM=256 x 56)
计算灰度共轭矩阵代码
cv::Mat getGlcm_0(cv::Mat img)
{
if (img.channels() == 3)
{
cv::cvtColor(img, img, cv::COLOR_RGB2GRAY);
}
// 像素距离d=1
int d = 1;
int step = 256 / d;
cv::Mat glcm = cv::Mat::zeros(cv::Size(step, step), CV_8UC1);
for (int row = 0; row < img.rows; row++) {
for (int col = 0; col < img.cols - 1; col++) {
int i = img.at<uchar>(row, col);
int j = img.at<uchar>(row, col + 1);
glcm.at<uchar>(i, j)++;
}
}
return glcm;
}如果是其他角度的话,把for循环的部分修改一下即可,就不全放上来了。
计算矩阵的对比度
float contrast_need = 0;
for (int i = 0; i < 256; i++) {
for (int j = 0; j < 256; j++) {
contrast_need += glcm.at<uchar>(i, j) * (i - j) * (i - j);
}
}直接将矩阵的各个元素的差值进行计算,但是对上述两张图没有起到作用,还是前者的计算值更高。
只能再换别的。
LBP:
使用提取纹理的另外一个方法:LBP。
LBP的基本原理
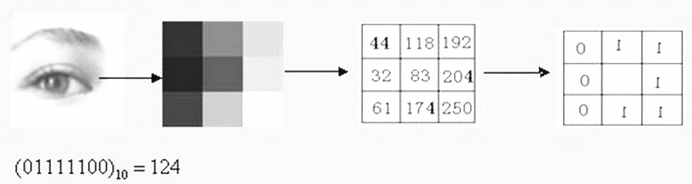
- 对图像中的所有点,以该点为中心,取3x3的邻域窗口;
- 将8-邻域像素值与中心点像素值进行比较,大于或等于中心像素标记为1,否则标记为0;
- 将周围0-1序列,以一定的顺序排列,成一个8位的无符号的二进制数,转化成整数;
- 这个整数就是表征这个窗口的LBP值。
LBP值共有2的8次方种可能,因此LBP值有256种。中心像素的LBP值反映了该像素周围区域的纹理信息。 以上,便是最基本的LBP算子。由于直接利用的灰度比较,所以其具有灰度不变性;
LBP代码
cv::Mat LBP(cv::Mat img)
{
if (img.channels() == 3)
{
cv::cvtColor(img, img, cv::COLOR_RGB2GRAY);
}
cv::Mat result;
result.create(img.rows - 2, img.cols - 2, img.type());
result.setTo(0);
int totalCode = 0;
for (int i = 1; i < img.rows - 1; i++)
{
for (int j = 1; j < img.cols - 1; j++)
{
uchar center = img.at<uchar>(i, j);
uchar code = 0;
code |= (img.at<uchar>(i - 1, j - 1) >= center) << 7;
code |= (img.at<uchar>(i - 1, j) >= center) << 6;
code |= (img.at<uchar>(i - 1, j + 1) >= center) << 5;
code |= (img.at<uchar>(i, j + 1) >= center) << 4;
code |= (img.at<uchar>(i + 1, j + 1) >= center) << 3;
code |= (img.at<uchar>(i + 1, j) >= center) << 2;
code |= (img.at<uchar>(i + 1, j - 1) >= center) << 1;
code |= (img.at<uchar>(i, j - 1) >= center) << 0;
result.at<uchar>(i - 1, j - 1) = code;
totalCode += code;
}
}
cout << totalCode << endl;
return result;
}很郁闷的,对于上述两张图,还是没什么太多作用。