类人机器人是一门大生意。今年,Figure AI公司筹集了6.75亿美元用于开发通用人形机器人。该公司目前的估值为26亿美元。特斯拉的擎天柱机器人灵巧手抓捏鸡蛋是全球的头版新闻。根据埃隆·马斯克(Elon Musk)的说法,它"有可能比汽车业务更重要"。波士顿动力公司被现代汽车以 11 亿美元收购。它最新的阿特拉斯人形生物令人印象深刻,可以灵活扭曲身体。马斯克在推特上回应了一张日本恐怖电影《魔戒》中扭曲鬼魂的照片。
投资者之所以争先恐后地进入,是因为他们认为人形机器人是通用机器人,可以为人类完成我们的体力劳动。根据Figure AI的使命宣言,"我们的首批应用将出现在制造业、航运和物流、仓储和零售等劳动力短缺最严重的行业。人类环境是为人体设计的,适合具有腿、手臂、躯干、手、脚和头部的人形生物。我们的电影和媒体将未来机器人描绘成现实中的人类,从C-3PO到终结者,都是人形机器人。
亨利·福特(Henry Ford)曾经说过:"为什么当我想要一双手时,我也会得到一个人呢?同样,如果人形机器人是用于体力劳动的,那么任何合适的机器人上的一双手是否足以胜任大多数工作?人形机器人的其余部分只是将手移动到需要它们的地方。这个问题很重要,因为在Figure AI、特斯拉和波士顿动力公司等公司中,大部分资金和精力都用于构建和控制机器人身体。但是,如果以体力劳动为目标,那么这些资源将更好地用于与人工智能共同设计的更好的手来控制它们(1)。
简单的对象处理
Bauza 及其同事 (2) 在本期《科学机器人》杂志上展示了使用两只机器人手拾取和放置物体的最新技术,他们的方法为 SimPLE(拾取、定位和放置的模拟)。他们考虑精确的拾取和放置:必须拾取桌子上未知位置的一堆已知物体,然后以严格的公差放置在已知位置。例如,对象可以是横跨表面的各种大小的螺栓;机器人将依次拾取每个螺栓,重新定向,并将其放置在适合该螺栓的特定插座中(图 1A)。
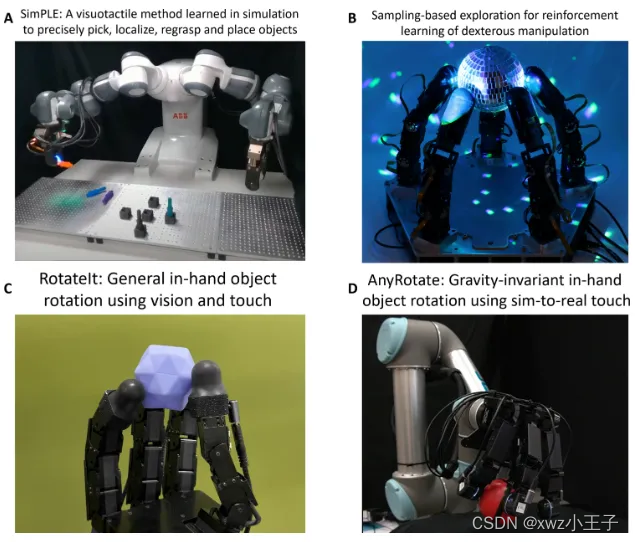
图 1.视触觉传感的机器人灵巧性的最新技术。(A) SimPLE,在双手机器人 (2) 的两个夹持器上各有两个高分辨率触觉指尖。(B) 使用五根手指上的光学触觉传感器进行灵巧操作 (9)。(C) RotateIT,在机器人手上使用四个光学触觉指尖 (10)。(D) AnyRotate,在机器人手臂系统 (11) 上具有四个光学触觉指尖。
听起来很简单?实际上,它为莫拉维克的悖论提供了一个很好的例子,即对人类来说容易的事情对机器来说却很难。该解决方案依赖于结合三项关键技术。首先,在双手机器人上安装了一对机器人夹持器,这样抓取的物体就可以在任务中途通过从一只手传递到另一只手来调整;例如,放在桌子上的螺栓可能只能抓住它的轴,但将其放入插座需要抓住它的头部。其次,开发了每个物体的三维计算机模型,以便在模拟中评估抓取,以规划机器人将尝试抓取物体的位置。抓取的位置决定了物体是否被稳定地握住,如何操纵它进行放置,以及哪些特征在指尖下------所有这些都可以模拟并与放置在场景上方的摄像机的视觉深度图像进行比较。第三,高分辨率触觉传感提高了可靠地拾取和放置所有被测物体的精度。
总体而言,视觉触觉传感比单独的视觉或触觉效果更好。仅凭视觉,选择和放置可能仍然是可能的,但放置更有可能失败;例如,将杆不准确地插入紧固的支架可能会遗漏或夹住边缘。这些故障源于估计被握住物体相对于指尖的位置和方向的不确定性 (3),这决定了夹持器放置物体的精度。通过估计每个指尖的压痕深度图,然后在仿真中定向对象模型,使这些压痕与对象匹配,可以从高分辨率触觉数据中测量物体的姿态 (4)。
机器人灵巧性的复兴
触觉传感通过直接告知机器人的指尖如何接触物体来提供帮助。但是,需要一种特定类型的触觉传感器:一种详细说明接触空间几何形状的传感器。SimPLE中使用的GelSlim传感器(5)是依赖于内部摄像头的光学触觉传感器的一个版本,现在已经有许多成熟的设计,包括GelSight(6)和TacTip系列(7)。光学触觉传感最近已经起飞,因为手机的数码相机可以舒适地安装在机器人的指尖上,而成本仅为几美元。
光学触觉传感正在掀起机器人灵巧性的复兴。五年前,OpenAI 表明,通过一系列目标方向旋转手持的立方体,可以使用类似人类的机器人手学习复杂的操作技能 (8)。然而,他们的设置------一个容纳 19 台摄像机的"笼子"------意味着他们的方法依赖于手周围的大量视觉数据。显然,这并不容易扩展到其他灵巧的技能,因为安装大量摄像头是不切实际的。触觉传感需要几年时间才能赶上,但最近,一些实验室已经演示了使用触摸的手部旋转物体(9-11)。所有这些演示都依赖于使用装有光学触觉传感器的多指手(图 1,B 到 D)。
现在,假设 SimPLE 展示的双手灵巧性与使用多指触觉手的手部灵巧性相结合。整体将大于部分之和:两只手可以灵活地协同工作,以更灵巧地控制所握住的物体。从本质上讲,人类天生的操纵技能只不过是一种精确控制被握住物体的姿势和施加的力的能力,使我们能够处理无数的日常物品和工具,从拿起杯子喝酒到检查手机的电子邮件。沿着这条道路,机器人可能很快就会实现类似人类的操作。这个未来可能掌握在一双触觉机器人的手中。