低空无人机集群的控制、调度、信息回传需要有高度可靠和稳定的无线通信链路来保障。我国发达的公网基础设施为上述应用创造了良好的条件,但低空应用必须要考虑到在极端情况下公网瘫痪造成的通信链路中断带来的影响,因此有必要在公网之外,寻求采用无线通信专网的备份和应急手段。
系留无人机、自组网和单兵图传技术的结合,构成了低空集群组网指挥系统的核心技术。以下是对这一技术的详细解析:
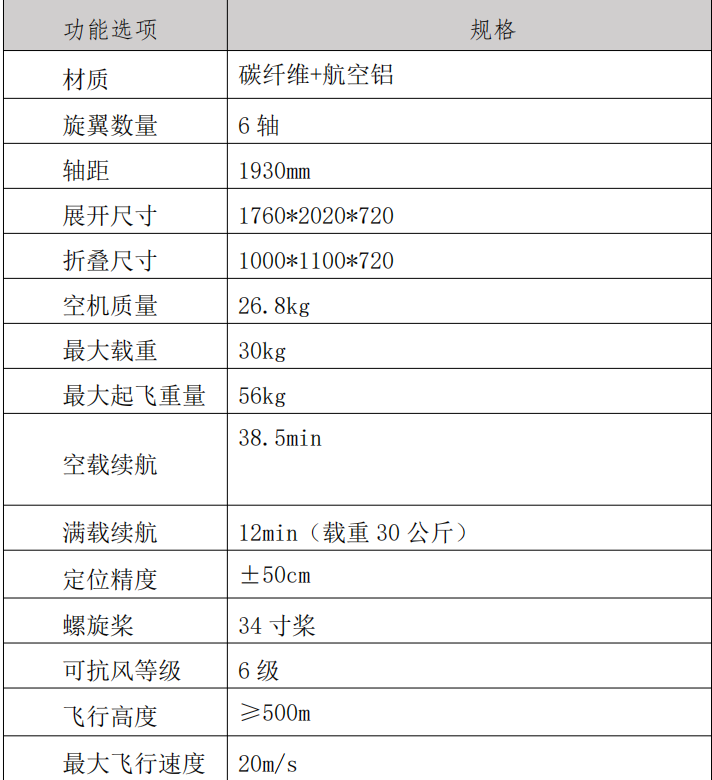
系留无人机
系留无人机是将无人机与系留综合缆绳相结合,通过综合缆绳传输电能,从而实现了无人机长时间悬停和连续工作的能力。系留无人机具有以下特点:

机动性强:结构大小、制作材料可以根据应用需求来设计,不会受到较大限制。
悬停时间长:通过综合缆绳传输电能,解决了电池供电限制,实现了不限时空中悬停。
工作方式多样:根据绞车的固定位置不同,可分为地面固定式、车载移动式和舰载移动式,以适应各种工作环境的需求。
参数推荐:
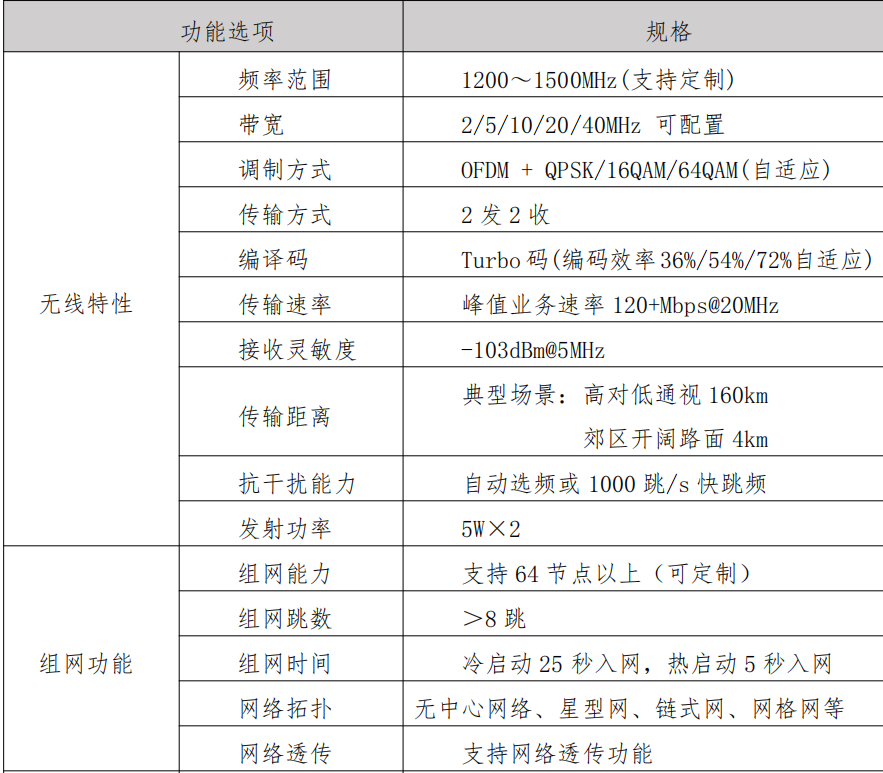
自组网
自组网是一种移动通信和计算机网络相结合的网络,具有动态性、自适应性和鲁棒性等特点。在系留无人机应用中,自组网为无人机提供了高效、可靠的通信手段。自组网的特点包括:
快速入网:节点能够快速建立并加入网络。
自动多跳中继:支持节点间的多跳通信,扩大网络覆盖范围。
高效协同:可以与手持单兵系统、车载系统以及周边基站组网设备快速组建互联互通的立体网络。
参数推荐:
单兵图传
单兵图传是一种采用无线微波传输技术的便携式视频传输设备,广泛应用于公安、武警、部队、应急、消防等领域。其主要特点包括:
高速率吞吐:采用5G技术的波束成形/收发分集/空分复用,实现高速数据传输。
远距离传输:传输距离可达100公里以上,满足远程监控和指挥需求。
适应复杂环境:支持Mesh网络(自组织、自愈合、自适应),在复杂环境下也能保持稳定的通信连接。
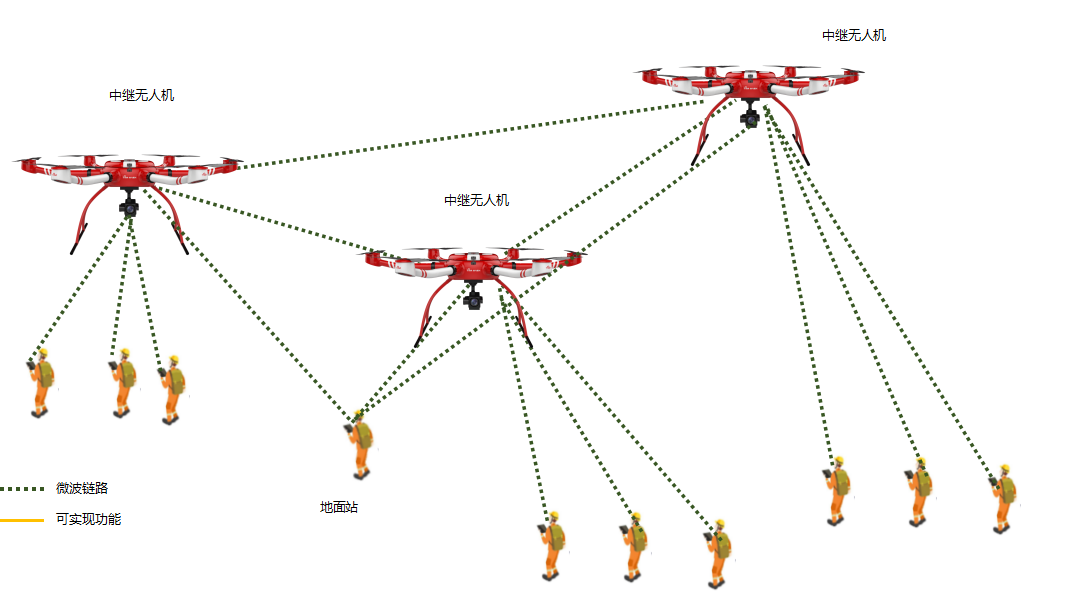
低空集群组网指挥系统
结合系留无人机、自组网和单兵图传技术,低空集群组网指挥系统实现了以下功能:
-
前端数据采集:通过单兵图传和系留无人机搭载的高清云台相机,实时采集事故现场的音视频和数据。
-
数据传输与指令传达:自组网技术为无人机和单兵图传设备提供了稳定、可靠的通信链路,确保数据的实时传输和指令的顺畅下达。
-
现场应急指挥:通过现场应急指挥车对整个网络进行管理和控制,实现对事故现场的实时监控和指挥调度。
-
协同作业:系留无人机和单兵图传设备可以协同工作,实现更高效的应急处理和救援任务。