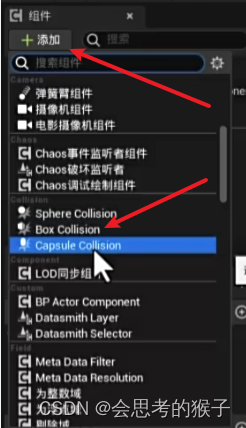
在你需要碰撞的物体上添加一个碰撞检测组件
碰撞预设 设置为NoCollision,这样移动过程中就不会有物理碰撞阻挡效果,只负责检测是否碰撞,比较难解释,如果学过Unity的话,可以把它理解成 Collision 为 Trigger
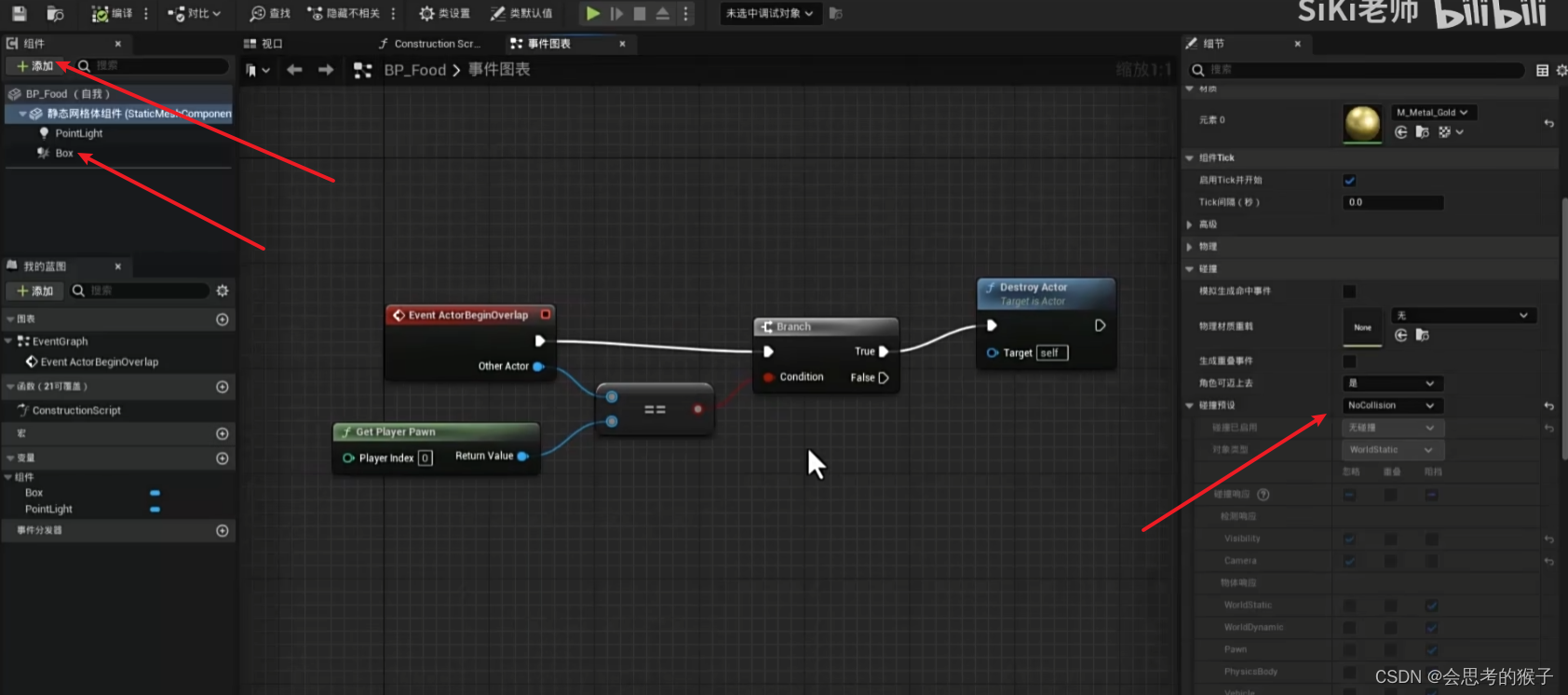
-------------------下面这个有点像Unity的OnTriggerEnter,跟OnCollisionEnter的感jio------------------
这里需要注意的点是: 如果是物体跟触发区域检测 使用这个节点

如果是物体跟实体碰撞检测 使用这个节点
