题目
观测到的数据 具有PDF
具有PDF

在μ给定的条件下, 是相互独立的。均值具有先验PDF:
是相互独立的。均值具有先验PDF:
求μ的 MMSE 和 MAP 估计量。另外,当 和
和 时将发生什么情况?
时将发生什么情况?
解答
 和
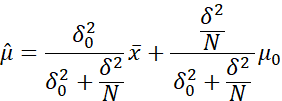
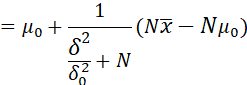
和 两者都是独立高斯分布,与例题10.1一致,直接套用(10.11)公式,可以得到μ的 MMSE估计量为:
两者都是独立高斯分布,与例题10.1一致,直接套用(10.11)公式,可以得到μ的 MMSE估计量为:
当然也可以利用公式(10.32)估计(对于列向量,10.32比10.28好计算)
此时,根据题目条件得到:

写出向量形式得到:
其中:



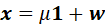
根据10.32,得到:

因此:

与上式相比,结果是一致的。
另外,根据例11.5上面的性质,得到联合分布属于高斯,且先验也是高斯,那么MAP和MMSE估计量形式相同。因此,此时MAP估计量也是 。或者利用例题10.1中条件概率密度求导,也可以得到相同的结果。
。或者利用例题10.1中条件概率密度求导,也可以得到相同的结果。
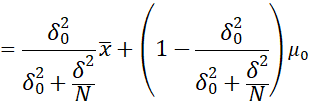
因此,此时,如果 ,那么此时
,那么此时 将高度集中在先验附近,此时先验知识主导:
将高度集中在先验附近,此时先验知识主导:

而 ,此时可以认为先验不起作用,此时实测数据主导结果:
,此时可以认为先验不起作用,此时实测数据主导结果:
