使用OpenCV-Python进行长度和角度测量的项目可以应用于多个领域,如工业自动化、机器人视觉、测绘、教育等。这类项目的核心是利用计算机视觉技术从图像或视频中提取有用的信息,进而计算出物体的尺寸或角度。以下是一个基于OpenCV-Python进行长度和角度测量的基本框架:
1. 图像预处理
- 读取图像 :使用
cv2.imread()函数读取图像。 - 灰度转换 :将彩色图像转换为灰度图像,以便后续处理。使用
cv2.cvtColor()函数。 - 二值化 :通过阈值处理将图像转换为黑白图像,以突出目标对象。使用
cv2.threshold()或cv2.adaptiveThreshold()。 - 边缘检测 :使用Canny边缘检测算法来找到图像中的边界线。使用
cv2.Canny()函数。 - 形态学操作 :使用膨胀和腐蚀操作去除噪声并细化边缘。使用
cv2.dilate()和cv2.erode()。
2. 物体检测与轮廓提取
- 轮廓检测 :使用
cv2.findContours()函数检测图像中的轮廓。 - 轮廓筛选:根据面积、周长或形状特征筛选出感兴趣的物体轮廓。
3. 长度和角度测量
- 长度测量 :对于选定的轮廓,可以通过计算轮廓的最长直径或特定点之间的距离来估计长度。使用
cv2.minEnclosingCircle()或cv2.arcLength()和cv2.approxPolyDP()来简化轮廓。 - 角度测量 :使用
cv2.minAreaRect()找到最小面积的矩形包围轮廓,然后计算矩形的角度。或者,使用Hough变换找到直线,然后计算这些直线之间的角度。
4. 结果可视化
- 使用
cv2.drawContours()绘制轮廓。 - 使用
cv2.line()和cv2.putText()显示测量结果。 - 最后,使用
cv2.imshow()展示处理后的图像。
5. 实际应用考虑
- 标定:为了将像素单位转换为现实世界中的单位(如毫米),需要进行相机标定。
- 误差分析:考虑到图像分辨率、光照条件、相机位置等因素,测量结果会有一定的误差。
- 实时处理:如果项目要求实时测量,那么需要优化代码以提高处理速度。
这只是一个基本的框架,实际项目可能需要根据具体需求进行调整和优化。例如,对于复杂的场景,可能需要使用更高级的图像处理技术,如深度学习方法来识别和测量物体。
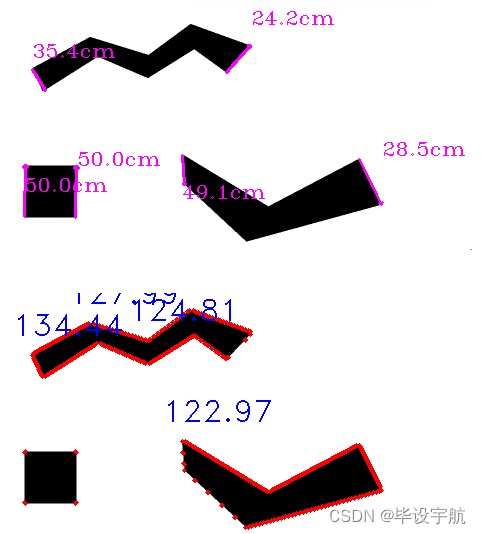
运行结果如下:
使用方法:
替换下面参数即可:

注意事项:
必须有一个最小面积的矩形提供长度参考,在main里面的W,H参数也是这个参考的长度(默认单位为cm) 如果没有最小矩形面积会报错 下版本优化