本博文建议与我上一篇I2C 通信协议共同理解 合成一套关于I2C软硬件体系
STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担
特点:
- 多主机功能:该模块既可做主设备也可做从设备
- 支持7位 / 10位地址模式
- 支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)
- 根据特定设备的需要,可以使用DMA以减轻CPU的负担
- 可配置的PEC(信息包错误检测)的产生或校验:
- 兼容SMBus协议
STM32F103C8T6 硬件I2C资源:I2C1、I2C2
模式选择
接口可以下述 4 种模式中的一种运行:
- 从发送器模式
- 从接收器模式
- 主发送器模式
- 主接收器模式
基本结构
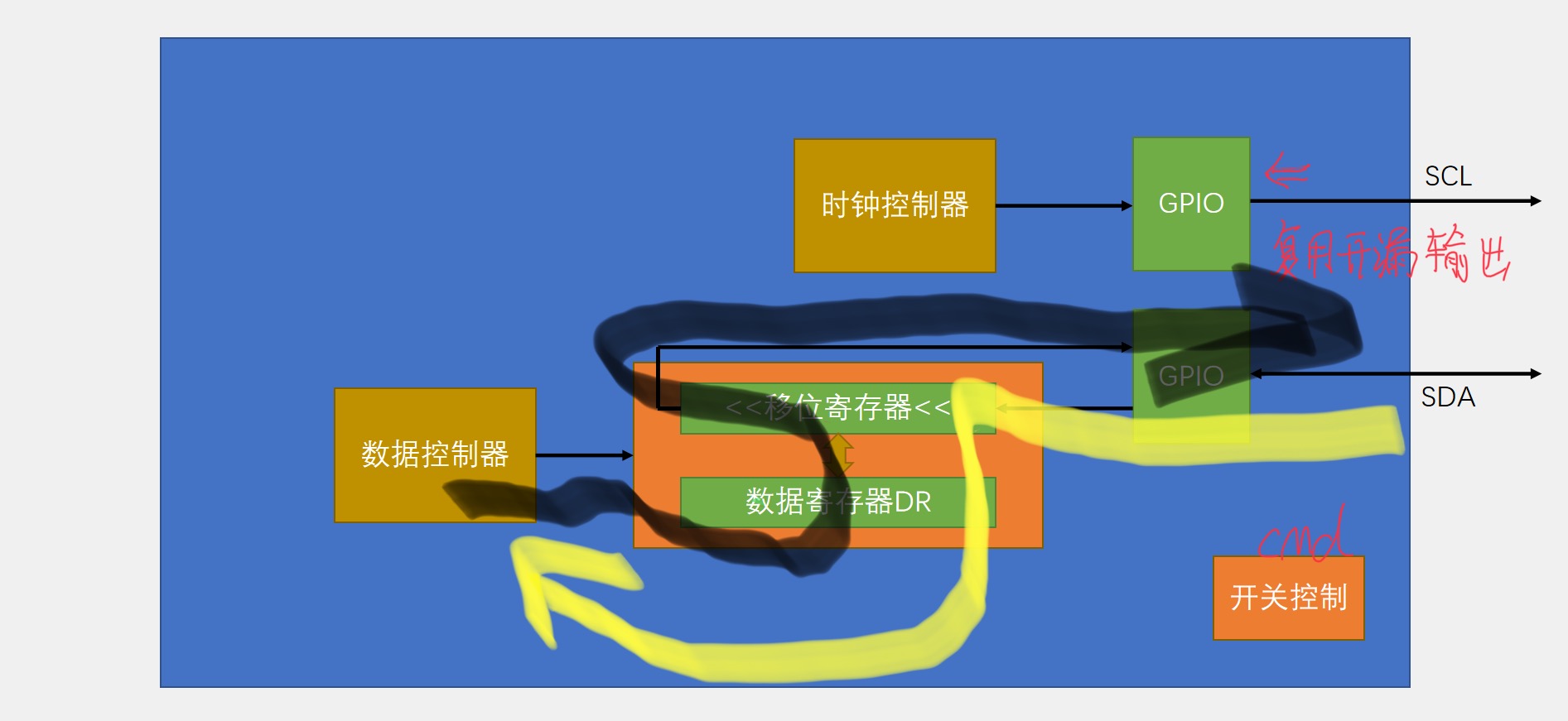
注意:
SDA线 可以输入输出 ,同样SCL线也可以输入输出,当I2C设备当从机时候,其他主机的SCL线输入控制该设备的SCL线
通信流程
主机发送
说明:S=Start(起始条件),Sr=重复的起始条件,P=Stop(停止条件),A=响应,NA=非响应,
 EVx=事件(ITEVFEN=1时产生中断)。
EVx=事件(ITEVFEN=1时产生中断)。
- EV5: 置SB=1, 读SR1然后将地址写入DR寄存器 将清除该事件。
- EV6: 置ADDR=1, 读SR1然后读SR2将清除该事件。
- EV8_1:置TxE=1, 移位寄存器空,数据寄存器空,写DR寄存器。
- EV8: 置TxE=1, 移位寄存器非空,数据寄存器空,写入DR寄存器将清除该事件。
- EV8_2:置TxE=1,BTF=1 请求设置停止位。TxE和BTF位由硬件在产生停止条件时清除。
- EV9: 置ADDR10=1, 读SR1然后写入DR寄存器将清除该事件。
主机接收
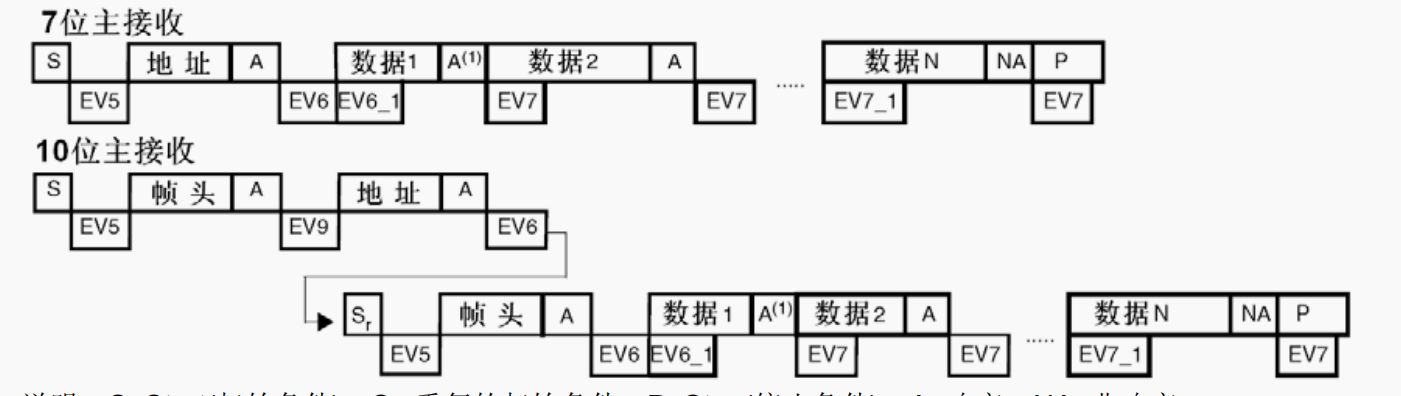
- EV5: 置SB=1, 读SR1然后将地址写入DR寄存器将清除该事件。
- EV6: 置ADDR=1, 读SR1然后读SR2将清除该事件。 在10位主接收模式下,该事件后应设置CR2的START=1。
- EV6_1: 没有对应的事件标志,只适于接收1个字节的情况。 恰好在EV6之后(即清除了ADDR之后),要清除响应和停止条件的产生位。
- EV7: 置RxNE=1, 读DR寄存器清除该事件。
- EV7_1: 置RxNE=1, 读DR寄存器清除该事件。设置ACK=0和STOP请求。
- EV9: 置ADDR10=1, 读SR1然后写入DR寄存器将清除该事件
初始化代码(利用MPU6050)
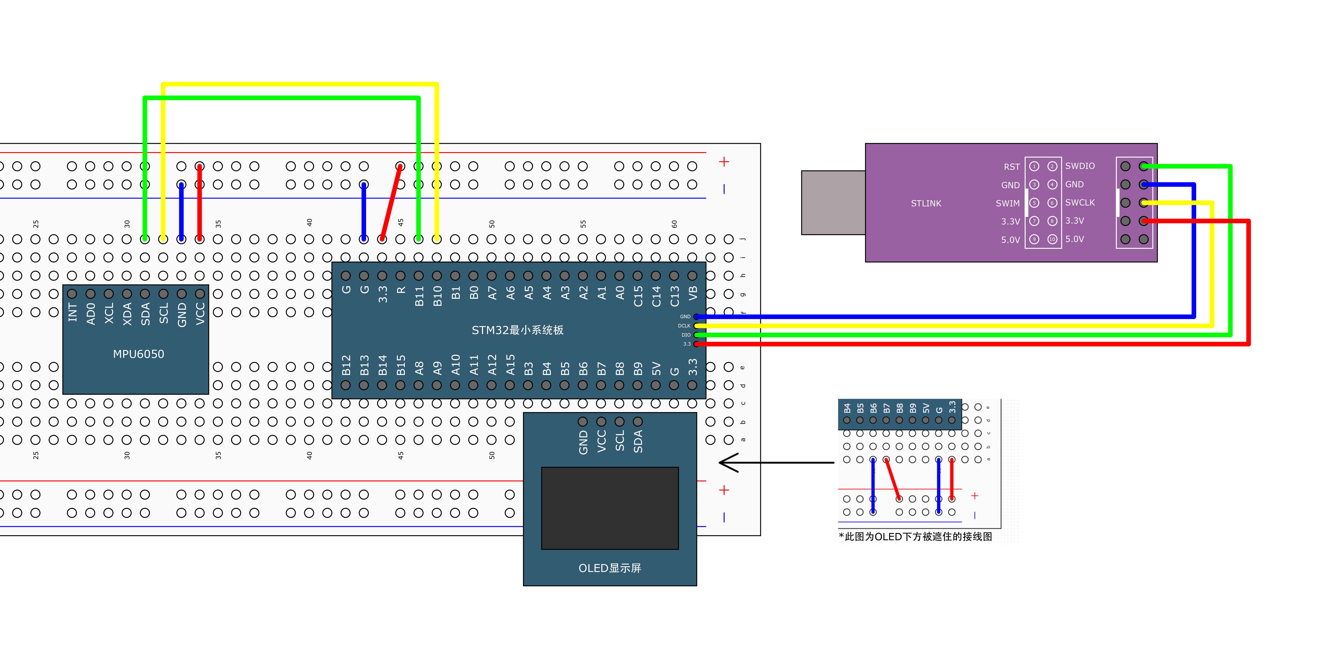
使用 I2C硬件模块 与 MPU6050 通信
I2C初始化
cpp
void MPU6050_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE); //开启I2C2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为复用开漏输出
/*I2C初始化*/
I2C_InitTypeDef I2C_InitStructure; //定义结构体变量
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //模式,选择为I2C模式
I2C_InitStructure.I2C_ClockSpeed = 50000; //时钟速度,选择为50KHz
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //时钟占空比,选择Tlow/Thigh = 2
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //应答,选择使能
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
//应答地址,选择7位,从机模式下才有效
I2C_InitStructure.I2C_OwnAddress1 = 0x00; //自身地址,从机模式下才有效
I2C_Init(I2C2, &I2C_InitStructure);
//将结构体变量交给I2C_Init,配置I2C2
/*I2C使能*/
I2C_Cmd(I2C2, ENABLE); //使能I2C2,开始运行
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
//电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
//电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}写 入(Data即写入数据)
cpp
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);
//硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
//等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);
//硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
//等待EV6
I2C_SendData(I2C2, RegAddress);
//硬件I2C发送寄存器地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);
//等待EV8
I2C_SendData(I2C2, Data);
//硬件I2C发送数据
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);
//等待EV8_2
I2C_GenerateSTOP(I2C2, ENABLE);
//硬件I2C生成终止条件
}读 出(返回值即读出数据)
cpp
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
I2C_GenerateSTART(I2C2, ENABLE);
//硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
//等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);
//硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
//等待EV6
I2C_SendData(I2C2, RegAddress);
//硬件I2C发送寄存器地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);
//等待EV8_2
I2C_GenerateSTART(I2C2, ENABLE);
//硬件I2C生成重复起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
//等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver);
//硬件I2C发送从机地址,方向为接收
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);
//等待EV6
I2C_AcknowledgeConfig(I2C2, DISABLE);
//在接收最后一个字节之前提前将应答失能
I2C_GenerateSTOP(I2C2, ENABLE);
//在接收最后一个字节之前提前申请停止条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);
//等待EV7
Data = I2C_ReceiveData(I2C2);
//接收数据寄存器
I2C_AcknowledgeConfig(I2C2, ENABLE);
//将应答恢复为使能,为了不影响后续可能产生的读取多字节操作
return Data;
}