技术栈
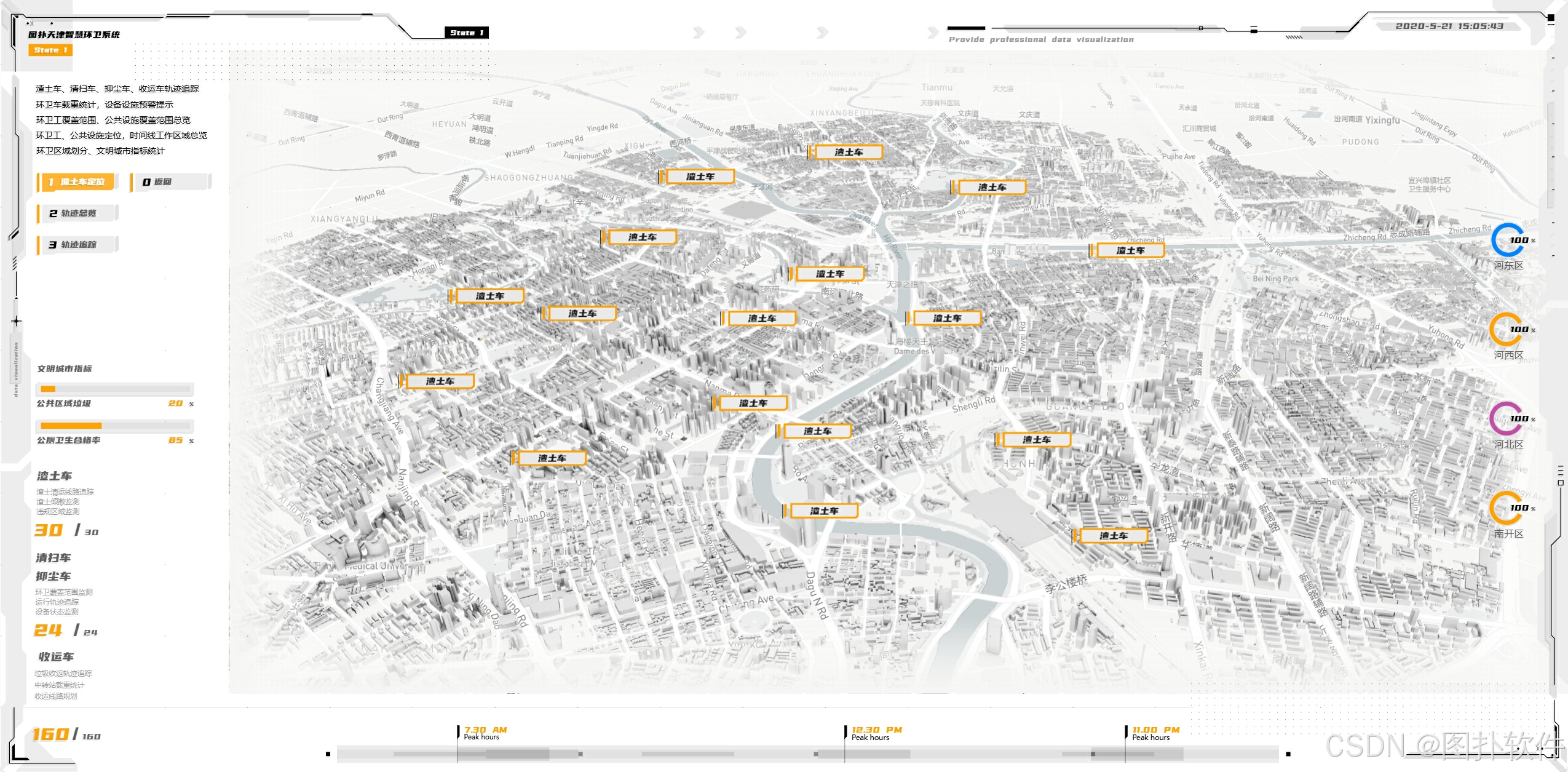
智慧环卫可视化:科技赋能城市清洁管理
图扑软件
2024-07-31 22:46
图扑智慧环卫可视化通过实时监控、数据分析和智能调度,提高环卫作业效率,优化资源配置,提升城市清洁水平,实现城市管理的精细化和现代化。
大数据
前端
javascript
人工智能
信息可视化
智慧城市
可视化
上一篇:
Tkinter简介与实战(1)
下一篇:
Nginx的跨域问题解决
相关推荐
神奇小汤圆
7 分钟前
面试官:Agent意图识别怎么做?95%的人一句话就把自己送走了
人工智能
GIS阵地
19 分钟前
QgsSingleBandPseudoColorRenderer 完整详解(QGIS 3.40.13 C++)
开发语言
·
前端
·
c++
·
qt
·
qgis
兜客互动
23 分钟前
2026年AI关键词拓展挖掘软件,高效助力内容创作精准获流
人工智能
·
python
AI的探索之旅
26 分钟前
AI辅助原理图评审:电源去耦、BOOT引脚、VCAP——19项逐一核查,遗漏?不存在的
人工智能
·
vscode
·
嵌入式硬件
武子康
34 分钟前
Kimi K3 2.8T:开放权重不等于本地可跑 超稀疏 MoE、百万上下文与真实部署边界
人工智能
刘较瘦_
39 分钟前
AI 开发中的 Git Submodule 父子仓库模式:前后端分仓管理与协作实践
前端
·
github
老刘说AI
1 小时前
AI服务核心: 高并发原理与性能监控调优
人工智能
·
神经网络
·
langchain
·
llama
·
持续部署
GeekArch
1 小时前
第24讲:Vibe模式代码风格控制——适配Keil/STM32工程规范
人工智能
·
stm32
·
单片机
·
嵌入式硬件
·
mcu
·
决策树
·
ai编程
牧艺
1 小时前
cos-design WeatherBackground:用 Canvas 做一个「会变天」的背景引擎
前端
·
canvas
·
视觉设计
OpenTiny社区
1 小时前
深度解析 LSP 如何为 AI 装上“眼睛”
前端
·
ai编程
热门推荐
01
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
02
GitHub 镜像站点
03
如何新建文件夹? 电脑新建文件夹的4种方法
04
AI科技热点日报 | 2026年07月01日
05
幻兽帕鲁 - 服务器管理员权限与 GM 命令完全指南
06
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
07
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
08
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?
09
2026 年 AI 大模型 & AI 编程工具实战全总结
10
Kimi K3 真实体验:全网评价整理,优缺点一次性说清楚