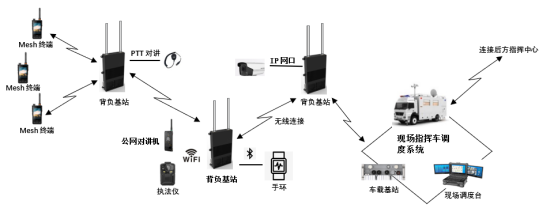
Mesh自组网,又称无线网状网络(Wireless Mesh Network, WMN),是一种具有自组织、自配置、自愈合能力的网络架构。它允许网络中的节点(设备)不仅作为终端用户接入点,还能作为路由器转发数据包给其他节点,从而构建一个动态、多跳、无中心化的通信网络。手持Mesh自组网系统特别适用于复杂环境(如城市应急通信、野外探险、军事行动等)中,能够提供快速部署、灵活扩展和高可靠性的通信解决方案。

组网技术与原理
Mesh自组网的核心在于其分布式路由算法和自组织特性。每个节点能够自动发现周围的邻居节点,并根据网络状况(如链路质量、节点负载等)动态选择最优路径进行数据传输。常见的路由算法包括洪泛法、最短路径算法、基于链路质量的路由选择等。此外,Mesh网络还采用多信道接入、时分多址(TDMA)、码分多址(CDMA)等技术来优化信道利用率和减少干扰。
无线射频技术
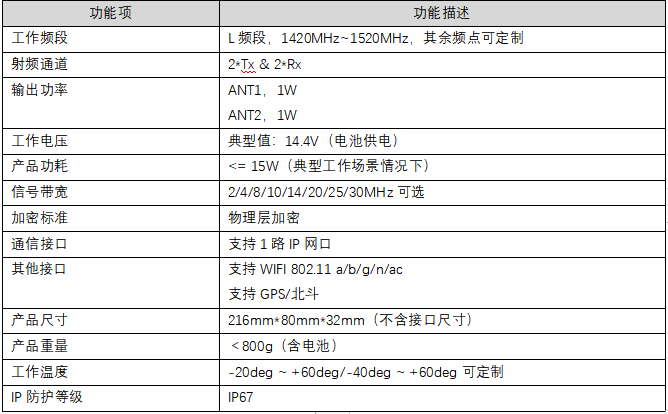
手持Mesh自组网系统依赖于先进的无线射频(RF)技术,包括但不限于Wi-Fi、Zigbee、LoRa、NB-IoT等。这些技术各具特点,如Wi-Fi提供高速数据传输能力,适用于带宽需求较高的场景;Zigbee则以其低功耗、自组网能力强著称,适合大规模设备互联;LoRa和NB-IoT则广泛应用于远距离、低功耗的物联网通信。手持设备通常选用集成度高、功耗低的射频模块,以确保长时间稳定运行。
资源调度与管理
资源调度与管理是Mesh自组网高效运行的关键。它涉及频谱资源、能量资源、计算资源等的合理分配。在网络层面,通过智能的频谱管理策略,如动态频谱接入(DSA)、认知无线电(CR)等,可以最大化频谱利用效率,减少干扰。同时,节点间通过协作,实现能量的均衡消耗,延长网络寿命。此外,合理的任务调度和计算资源分配,也能提升整个网络的性能和响应速度。
节点自我管理能力
手持Mesh自组网系统的每个节点都具备一定的自我管理能力,包括自动配置、自我修复和自我优化等。自动配置能力使得节点在加入网络时能够自动获取网络参数,建立通信连接;自我修复能力则允许网络在部分节点失效时,通过重新选路、调整拓扑结构等方式,快速恢复通信;自我优化则通过不断学习网络运行数据,调整路由策略、功率控制等参数,以达到最佳的网络性能。
网络拓扑与结构
Mesh自组网的拓扑结构灵活多变,可以根据实际应用场景和需求进行调整。常见的拓扑结构包括平面型、层次型和混合型。平面型结构中,所有节点地位平等,适合小规模、高动态的网络;层次型结构则引入簇头节点,负责簇内数据的聚合和转发,适合大规模网络;混合型结构则结合了两者的优点,根据具体情况灵活选择。
安全性与隐私保护
手持Mesh自组网系统面临的安全威胁包括但不限于窃听、篡改、假冒等。为保障网络的安全性和用户数据的隐私性,需采取一系列安全措施,如加密通信(如AES加密)、身份认证(如基于公钥基础设施的PKI认证)、入侵检测与防御等。此外,合理的访问控制和隐私保护策略也是必不可少的。
应用领域与案例
手持Mesh自组网系统因其灵活性和高可靠性,在多个领域展现出广泛的应用前景。在应急救援中,它可以为救援队伍提供快速部署的通信网络;在野外探险中,它能为探险者提供稳定的通信保障;在军事通信中,它能在复杂战场环境中保持通信畅通。具体案例包括:城市灾后应急通信网络的快速构建、森林火灾扑救现场的即时通讯、边境巡逻队的无线通信等。这些应用充分展示了手持Mesh自组网系统在提高通信效率、保障通信安全方面的独特优势。