秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】------点击即可跳转
💡💡💡 本专栏所有程序均经过测试,可成功执行**💡💡💡**
专栏目录 :《YOLOv8改进有效涨点》专栏介绍 & 专栏目录 | 目前已有80+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进------点击即可跳转
本文介绍一种专注于开发现代、高效、轻量级的密集预测模型 ,在参数、FLOPs和性能之间进行权衡。倒置残差块(IRB)作为轻量级CNN的基础设施,但在基于注意力的研究中还没有相对应的识别。从高效IRB和Transformer的有效组件的统一视角重新思考轻量级基础设施,将基于CNN的IRB扩展到基于注意力的模型,并抽象出一个一残差元移动块(MMB)用于轻量级模型设计。遵循简单但有效的设计准则,推导出现代化的倒置残差移动块(iRMB),并仅用iRMB构建了类似ResNet的高效模型(EMO)用于下游任务。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
专栏地址:YOLOv8改进------更新各种有效涨点方法------点击即可跳转 订阅学习不迷路
目录
[2. 将IRMB添加到YOLOv8中](#2. 将IRMB添加到YOLOv8中)
[2.1 IRMB的代码实现](#2.1 IRMB的代码实现)
[2.2 更改init.py文件](#2.2 更改init.py文件)
[2.3 添加yaml文件](#2.3 添加yaml文件)
[2.4 注册模块](#2.4 注册模块)
[2.5 执行程序](#2.5 执行程序)
[3. 完整代码分享](#3. 完整代码分享)
[4. GFLOPs](#4. GFLOPs)
[5. 进阶](#5. 进阶)
[6. 总结](#6. 总结)
1.原理

论文地址: Rethinking Mobile Block for Efficient Attention-based Models------点击即可跳转
官方代码: 官方代码仓库------点击即可跳转
在提供的文档中,介绍的关键概念是倒置残差移动块 (iRMB) ,它是轻量级 CNN 中使用的**倒置残差块 (IRB)**的现代改编,旨在提高基于注意力的模型的效率。下面是对 IRMB 背后主要原理的简化解释,无需深入研究复杂的公式:
倒置残差移动块 (IRMB) 的关键原理:
计算效率:
-
深度卷积 (DW-Conv):与标准卷积相比,这种技术显著减少了参数数量和计算复杂度。它分别对每个输入通道进行操作,使其更加高效。
-
改进的多头自注意力 (EW-MHSA):MHSA 的增强版本有助于更有效地捕获数据中远距离元素之间的依赖关系,这对于基于注意力的模型至关重要。
简单和统一:
-
简单设计:IRMB 避免使用复杂的结构或运算符,使其易于实现和优化各种应用。
-
统一核心模块:通过使用尽可能少的核心模块,IRMB 降低了整体模型复杂性,便于更轻松地部署和更快地计算。
多功能性和性能:
-
元移动块 (MMB):此块是一个多功能构建块,可用于构建不同的模块,包括 IRB、MHSA 和前馈网络。它确保在各种任务中保持一致和高效的性能。
-
类似 ResNet 的架构 (EMO):使用 IRMB 构建的高效模型 (EMO) 利用类似 ResNet 的 4 阶段架构,这对短距离和长距离依赖关系都有效,从而提高了整体模型性能。
实际结果:
- 基准性能:大量实验表明,使用 IRMB(例如 EMO-1M、EMO-2M 和 EMO-5M)构建的模型在准确性、效率(以 FLOP 衡量)和速度方面优于许多最先进的轻量级模型。
IRMB 优势总结:
-
提高效率:通过结合 DW-Conv 和改进的 MHSA,IRMB 实现了更高的计算效率。
-
简化设计:使用简单统一的设计使模型易于实现和部署。
-
提高性能:基于 IRMB 的模型在各种基准测试中表现出色,在参数、效率和准确性之间表现出更好的权衡。
这些原则使倒置残差移动块 (IRMB) 成为开发轻量级高效模型的强大框架,用于基于注意力的系统中进行密集预测。
2. 将IRMB添加到YOLOv8中
2.1 IRMB的代码实现
关键步骤一: 将下面代码粘贴到在/ultralytics/ultralytics/nn/modules/block.py中,并在该文件的__all__中添加"iRMB"
python
class iRMB(nn.Module):
def __init__(self, dim_in, dim_out, norm_in=True, has_skip=True, exp_ratio=1.0, norm_layer='bn_2d',
act_layer='relu', v_proj=True, dw_ks=3, stride=1, dilation=1, se_ratio=0.0, dim_head=8, window_size=7,
attn_s=True, qkv_bias=False, attn_drop=0., drop=0., drop_path=0., v_group=False, attn_pre=False):
super().__init__()
self.norm = get_norm(norm_layer)(dim_in) if norm_in else nn.Identity()
dim_mid = int(dim_in * exp_ratio)
self.has_skip = (dim_in == dim_out and stride == 1) and has_skip
self.attn_s = attn_s
if self.attn_s:
assert dim_in % dim_head == 0, 'dim should be divisible by num_heads'
self.dim_head = dim_head
self.window_size = window_size
self.num_head = dim_in // dim_head
self.scale = self.dim_head ** -0.5
self.attn_pre = attn_pre
self.qk = ConvNormAct(dim_in, int(dim_in * 2), kernel_size=1, bias=qkv_bias, norm_layer='none',
act_layer='none')
self.v = ConvNormAct(dim_in, dim_mid, kernel_size=1, groups=self.num_head if v_group else 1, bias=qkv_bias,
norm_layer='none', act_layer=act_layer, inplace=inplace)
self.attn_drop = nn.Dropout(attn_drop)
else:
if v_proj:
self.v = ConvNormAct(dim_in, dim_mid, kernel_size=1, bias=qkv_bias, norm_layer='none',
act_layer=act_layer, inplace=inplace)
else:
self.v = nn.Identity()
self.conv_local = ConvNormAct(dim_mid, dim_mid, kernel_size=dw_ks, stride=stride, dilation=dilation,
groups=dim_mid, norm_layer='bn_2d', act_layer='silu', inplace=inplace)
self.se = SqueezeExcite(dim_mid, rd_ratio=se_ratio, act_layer=get_act(act_layer)) if se_ratio > 0.0 else nn.Identity()
self.proj_drop = nn.Dropout(drop)
self.proj = ConvNormAct(dim_mid, dim_out, kernel_size=1, norm_layer='none', act_layer='none', inplace=inplace)
self.drop_path = DropPath(drop_path) if drop_path else nn.Identity()
def forward(self, x):
shortcut = x
x = self.norm(x)
B, C, H, W = x.shape
if self.attn_s:
# padding
if self.window_size <= 0:
window_size_W, window_size_H = W, H
else:
window_size_W, window_size_H = self.window_size, self.window_size
pad_l, pad_t = 0, 0
pad_r = (window_size_W - W % window_size_W) % window_size_W
pad_b = (window_size_H - H % window_size_H) % window_size_H
x = F.pad(x, (pad_l, pad_r, pad_t, pad_b, 0, 0,))
n1, n2 = (H + pad_b) // window_size_H, (W + pad_r) // window_size_W
x = rearrange(x, 'b c (h1 n1) (w1 n2) -> (b n1 n2) c h1 w1', n1=n1, n2=n2).contiguous()
# attention
b, c, h, w = x.shape
qk = self.qk(x)
qk = rearrange(qk, 'b (qk heads dim_head) h w -> qk b heads (h w) dim_head', qk=2, heads=self.num_head,
dim_head=self.dim_head).contiguous()
q, k = qk[0], qk[1]
attn_spa = (q @ k.transpose(-2, -1)) * self.scale
attn_spa = attn_spa.softmax(dim=-1)
attn_spa = self.attn_drop(attn_spa)
if self.attn_pre:
x = rearrange(x, 'b (heads dim_head) h w -> b heads (h w) dim_head', heads=self.num_head).contiguous()
x_spa = attn_spa @ x
x_spa = rearrange(x_spa, 'b heads (h w) dim_head -> b (heads dim_head) h w', heads=self.num_head, h=h,
w=w).contiguous()
x_spa = self.v(x_spa)
else:
v = self.v(x)
v = rearrange(v, 'b (heads dim_head) h w -> b heads (h w) dim_head', heads=self.num_head).contiguous()
x_spa = attn_spa @ v
x_spa = rearrange(x_spa, 'b heads (h w) dim_head -> b (heads dim_head) h w', heads=self.num_head, h=h,
w=w).contiguous()
# unpadding
x = rearrange(x_spa, '(b n1 n2) c h1 w1 -> b c (h1 n1) (w1 n2)', n1=n1, n2=n2).contiguous()
if pad_r > 0 or pad_b > 0:
x = x[:, :, :H, :W].contiguous()
else:
x = self.v(x)
x = x + self.se(self.conv_local(x)) if self.has_skip else self.se(self.conv_local(x))
x = self.proj_drop(x)
x = self.proj(x)
x = (shortcut + self.drop_path(x)) if self.has_skip else x
return x
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
"""Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)."""
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""Initialize Conv layer with given arguments including activation."""
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""Apply convolution, batch normalization and activation to input tensor."""
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
"""Perform transposed convolution of 2D data."""
return self.act(self.conv(x))
class Bottleneck(nn.Module):
"""Standard bottleneck."""
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5):
"""Initializes a bottleneck module with given input/output channels, shortcut option, group, kernels, and
expansion.
"""
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, k[0], 1)
self.cv2 = Conv(c_, c2, k[1], 1, g=g)
self.add = shortcut and c1 == c2
self.iRMB = iRMB(c2, c2)
def forward(self, x):
"""'forward()' applies the YOLO FPN to input data."""
return x + self.iRMB(self.cv2(self.cv1(x))) if self.add else self.iRMB(self.cv2(self.cv1(x)))
class C2f_iRMB(nn.Module):
"""Faster Implementation of CSP Bottleneck with 2 convolutions."""
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
"""Initialize CSP bottleneck layer with two convolutions with arguments ch_in, ch_out, number, shortcut, groups,
expansion.
"""
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
"""Forward pass through C2f layer."""
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
"""Forward pass using split() instead of chunk()."""
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))在处理图像的背景下,倒置残差移动块 (iRMB) 遵循结构化方法以实现高效准确的结果。以下是 iRMB 应用于图像处理时的主要流程概述:
iRMB 在图像处理中的主要流程
输入图像:
- 该过程从需要处理的输入图像开始。此图像通常表示为像素值的多维数组。
初始卷积:
- 1x1 卷积:输入图像首先经过逐点 1x1 卷积层。此层减少了输入图像中的通道数(或特征),使后续的深度卷积更加高效。
深度卷积 (DW-Conv):
-
3x3 深度卷积:然后通过深度卷积处理 1x1 卷积层的输出。与跨所有通道运行的传统卷积不同,深度卷积对每个输入通道应用单个卷积滤波器。这显著减少了计算负荷和参数数量。
-
深度卷积在保持计算效率的同时捕获图像中的空间特征。
逐点卷积:
- 1x1 卷积:在深度卷积之后,应用另一个 1x1 卷积层。该层负责跨通道组合深度卷积的输出,从而有效地增加输出特征的维度。
多头自注意力 (MHSA):
-
然后使用增强的多头自注意力机制处理逐点卷积的输出。MHSA 通过计算注意力分数并动态加权输入的不同部分,帮助模型关注图像的重要部分。
-
此步骤对于捕获图像中的长距离依赖关系和上下文信息至关重要。
前馈网络 (FFN):
- FFN 模块:注意力增强特征通过前馈网络传递,通常由两个线性变换组成,中间有一个 ReLU 激活。这有助于进一步细化和组合前几层提取的特征。
残差连接:
- 在整个 iRMB 中,残差连接用于将块的输入直接添加到其输出。这有助于保留来自初始层的信息,并允许在训练期间实现更好的梯度流。
输出特征图:
- iRMB 的最终输出是一个特征图,该特征图经过深度卷积、点卷积和自注意力机制的有效处理。然后,此特征图可用于各种下游任务,如图像分类、对象检测或分割。
iRMB 处理流程摘要:
-
高效卷积操作:1x1 和深度卷积的组合减少了参数数量和计算成本。
-
增强特征提取:多头自注意力捕获长距离依赖关系和重要的上下文信息。
-
残差连接:这些连接有助于保存信息和稳定训练。
-
前馈网络:细化特征以提高下游任务的性能。
通过遵循这种结构化方法,iRMB 可以有效地处理图像,平衡效率和准确性,使其适用于需要轻量级和高性能模型的应用程序。

2.2 更改init.py文件
**关键步骤二:**修改modules文件夹下的__init__.py文件,先导入函数

然后在下面的__all__中声明函数

2.3 添加yaml文件
**关键步骤三:**在/ultralytics/ultralytics/cfg/models/v8下面新建文件yolov8_iRMB.yaml文件,粘贴下面的内容
- OD【目标检测】
python
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOP
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, iRMB, []] # 16
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 19 (P4/16-medium)
- [-1, 1, iRMB, []] # 20
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 23 (P5/32-large)
- [-1, 1, iRMB, []] # 24
- [[16, 20, 24], 1, Detect, [nc]] # Detect(P3, P4, P5)- Seg【语义分割】
python
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOP
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, iRMB, []] # 16
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 19 (P4/16-medium)
- [-1, 1, iRMB, []] # 20
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 23 (P5/32-large)
- [-1, 1, iRMB, []] # 24
- [[16, 20, 24], 1, Segment, [nc, 32, 256]] # Segment(P3, P4, P5)温馨提示:因为本文只是对yolov8基础上添加模块,如果要对yolov8n/l/m/x进行添加则只需要指定对应的depth_multiple 和 width_multiple。
python
# YOLOv8n
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
max_channels: 1024 # max_channels
# YOLOv8s
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
max_channels: 1024 # max_channels
# YOLOv8l
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
max_channels: 512 # max_channels
# YOLOv8m
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
max_channels: 768 # max_channels
# YOLOv8x
depth_multiple: 1.33 # model depth multiple
width_multiple: 1.25 # layer channel multiple
max_channels: 512 # max_channels2.4 注册模块
**关键步骤四:**在task.py的parse_model函数iRMB"

2.5 执行程序
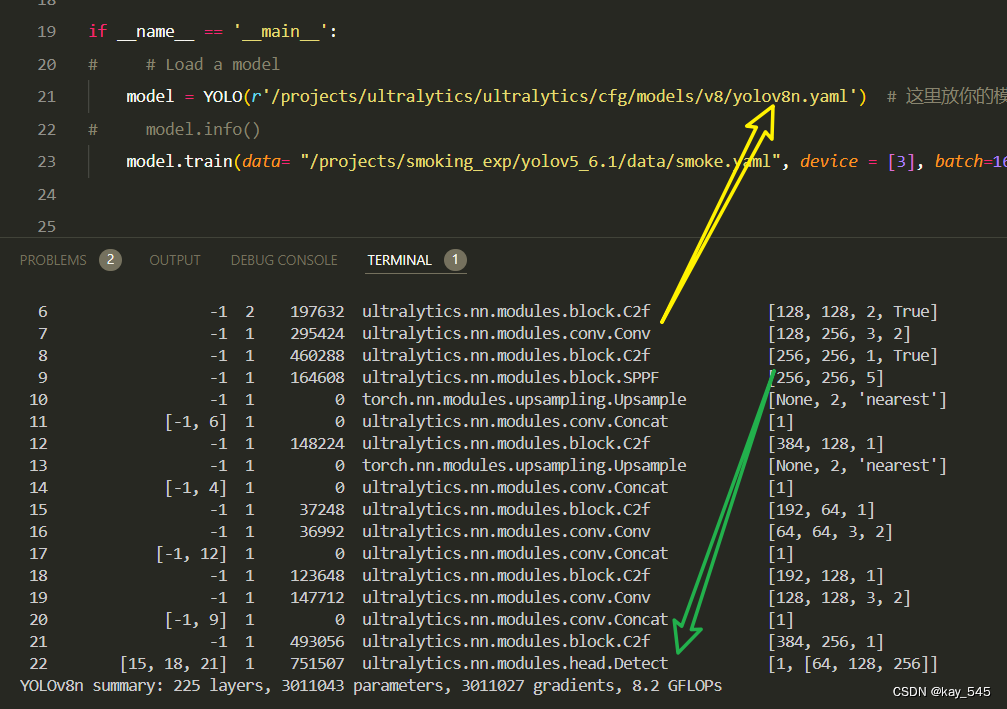
在train.py中,将model的参数路径设置为yolov8_iRMB.yaml的路径
建议大家写绝对路径,确保一定能找到
python
from ultralytics import YOLO
# Load a model
# model = YOLO('yolov8n.yaml') # build a new model from YAML
# model = YOLO('yolov8n.pt') # load a pretrained model (recommended for training)
model = YOLO(r'/projects/ultralytics/ultralytics/cfg/models/v8/yolov8_iRMB.yaml') # build from YAML and transfer weights
# Train the model
model.train()🚀运行程序,如果出现下面的内容则说明添加成功🚀
python
from n params module arguments
0 -1 1 464 ultralytics.nn.modules.conv.Conv [3, 16, 3, 2]
1 -1 1 4672 ultralytics.nn.modules.conv.Conv [16, 32, 3, 2]
2 -1 1 8592 ultralytics.nn.modules.block.C2f [32, 32, 1, True]
3 -1 1 18560 ultralytics.nn.modules.conv.Conv [32, 64, 3, 2]
4 -1 2 58688 ultralytics.nn.modules.block.C2f [64, 64, 2, True]
5 -1 1 73984 ultralytics.nn.modules.conv.Conv [64, 128, 3, 2]
6 -1 2 232064 ultralytics.nn.modules.block.C2f [128, 128, 2, True]
7 -1 1 295424 ultralytics.nn.modules.conv.Conv [128, 256, 3, 2]
8 -1 1 527488 ultralytics.nn.modules.block.C2f [256, 256, 1, True]
9 -1 1 164608 ultralytics.nn.modules.block.SPPF [256, 256, 5]
10 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
11 [-1, 6] 1 0 ultralytics.nn.modules.conv.Concat [1]
12 -1 1 165440 ultralytics.nn.modules.block.C2f [384, 128, 1]
13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
14 [-1, 4] 1 0 ultralytics.nn.modules.conv.Concat [1]
15 -1 1 41760 ultralytics.nn.modules.block.C2f [192, 64, 1]
16 -1 1 17216 ultralytics.nn.modules.block.iRMB [64, 64]
17 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
18 [-1, 12] 1 0 ultralytics.nn.modules.conv.Concat [1]
19 -1 1 140864 ultralytics.nn.modules.block.C2f [192, 128, 1]
20 -1 1 67200 ultralytics.nn.modules.block.iRMB [128, 128]
21 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
22 [-1, 9] 1 0 ultralytics.nn.modules.conv.Concat [1]
23 -1 1 560256 ultralytics.nn.modules.block.C2f [384, 256, 1]
24 -1 1 265472 ultralytics.nn.modules.block.iRMB [256, 256]
25 [16, 20, 24] 1 897664 ultralytics.nn.modules.head.Detect [80, [64, 128, 256]]
YOLOv8_iRMB summary: 564 layers, 3725120 parameters, 3725104 gradients, 25.6 GFLOPs3. 完整代码分享
python
https://pan.baidu.com/s/1YurvdKZzyj50geyBOG-Qjw?pwd=16wu提取码: 16wu
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识------Convolution
未改进的YOLOv8nGFLOPs
改进后的GFLOPs
现在手上没有卡了,等过段时候有卡了把这补上,需要的同学自己测一下

5. 进阶
可以与其他模块或者损失函数等结合,进一步提升检测效果
6. 总结
- 可以看出iRAM的创新只是加了一个反向残差,所以大家在改模块的时候也可以进行类似的缝合,起一个新意的名字既可发论文了。
- 倒置残差移动块 (iRMB) 是一种专门为高效高性能图像处理而设计的架构框架,结合了深度卷积、点卷积和多头自注意力机制。iRMB 的核心原理在于通过使用 1x1 点卷积来压缩和扩展特征维度,并结合在每个输入通道上独立运行的 3x3 深度卷积,来降低计算复杂度和参数数量。此设置可有效捕获空间特征。此外,还采用多头自注意力 (MHSA) 机制来关注图像的重要部分,捕获长距离依赖关系和上下文信息。残差连接集成在整个块中,以确保更好的梯度流并保留来自初始层的信息。这种组合使 iRMB 能够以效率和准确性的平衡来处理图像,使其成为轻量级和高性能图像处理任务的理想选择。