一、前言
偶然获得轮趣的二轮平衡小车一套,翻阅官方资料感觉内容较为杂糅,故写下此文旨在实现简洁的二轮平衡功能。

二、软件工具
1、芯片: STM32F407ZGT6
2、IDE: MDK-Keil软件
3、库文件:STM32F4xxHAL库
三、基本思路
MPU6050陀螺仪每5ms检测当前偏移角度,目标角度为0度,此为PID的控制内环,平衡环。
编码器中断每5ms读取当前马达编码值,目标速度为0,此为PID控制外环,位置环。
最后,根据两个环计算相加量,每隔10ms发出控制指令控制左右马达一起运动,达到最终平衡目的------MPU6050保持水平,小车保持原地静止。
四、CubeMX配置
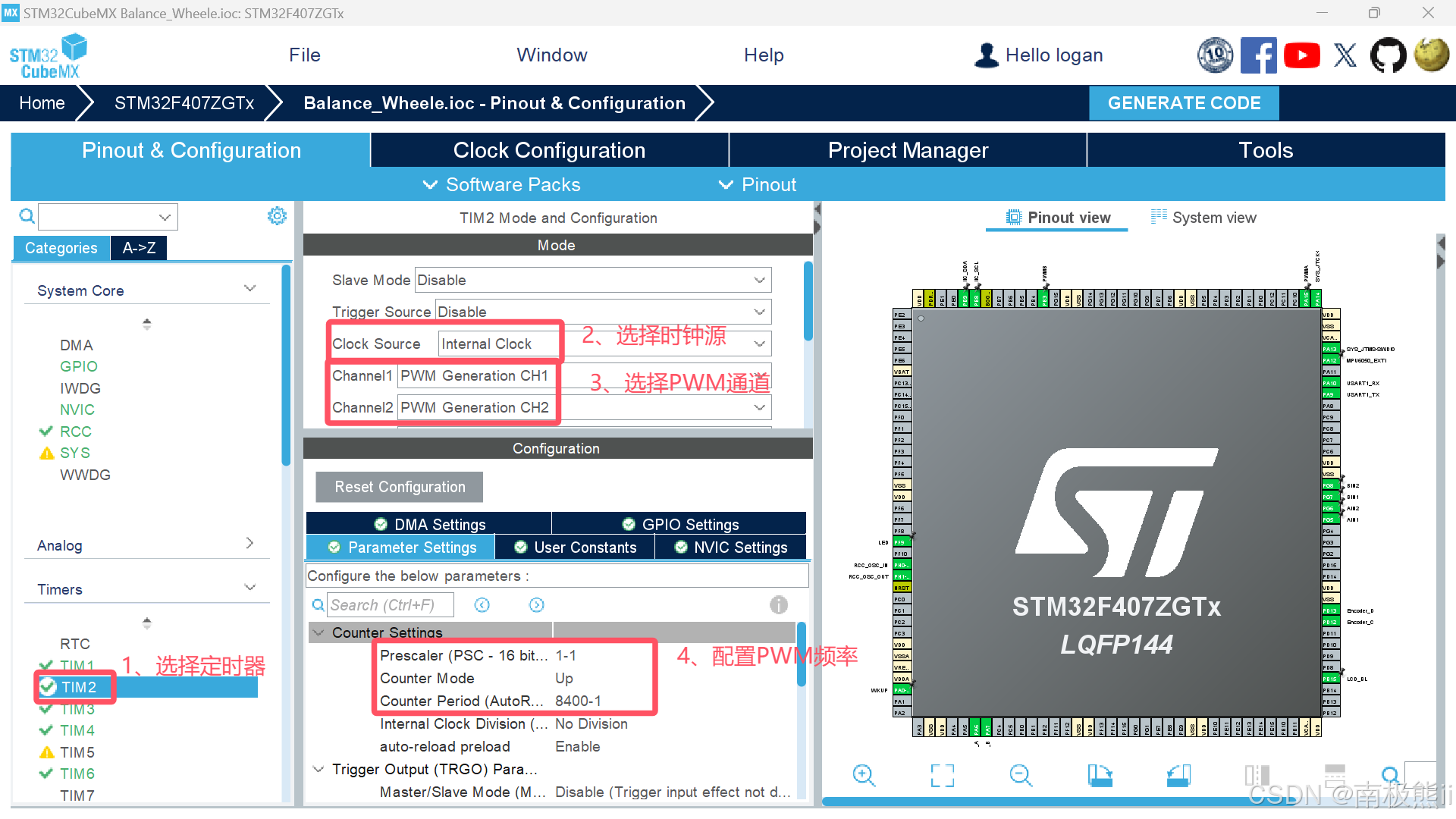
1、配置PWM波定时器TIM2
频率 frequency= 84MHz / 1 / 8400 = 10kHz
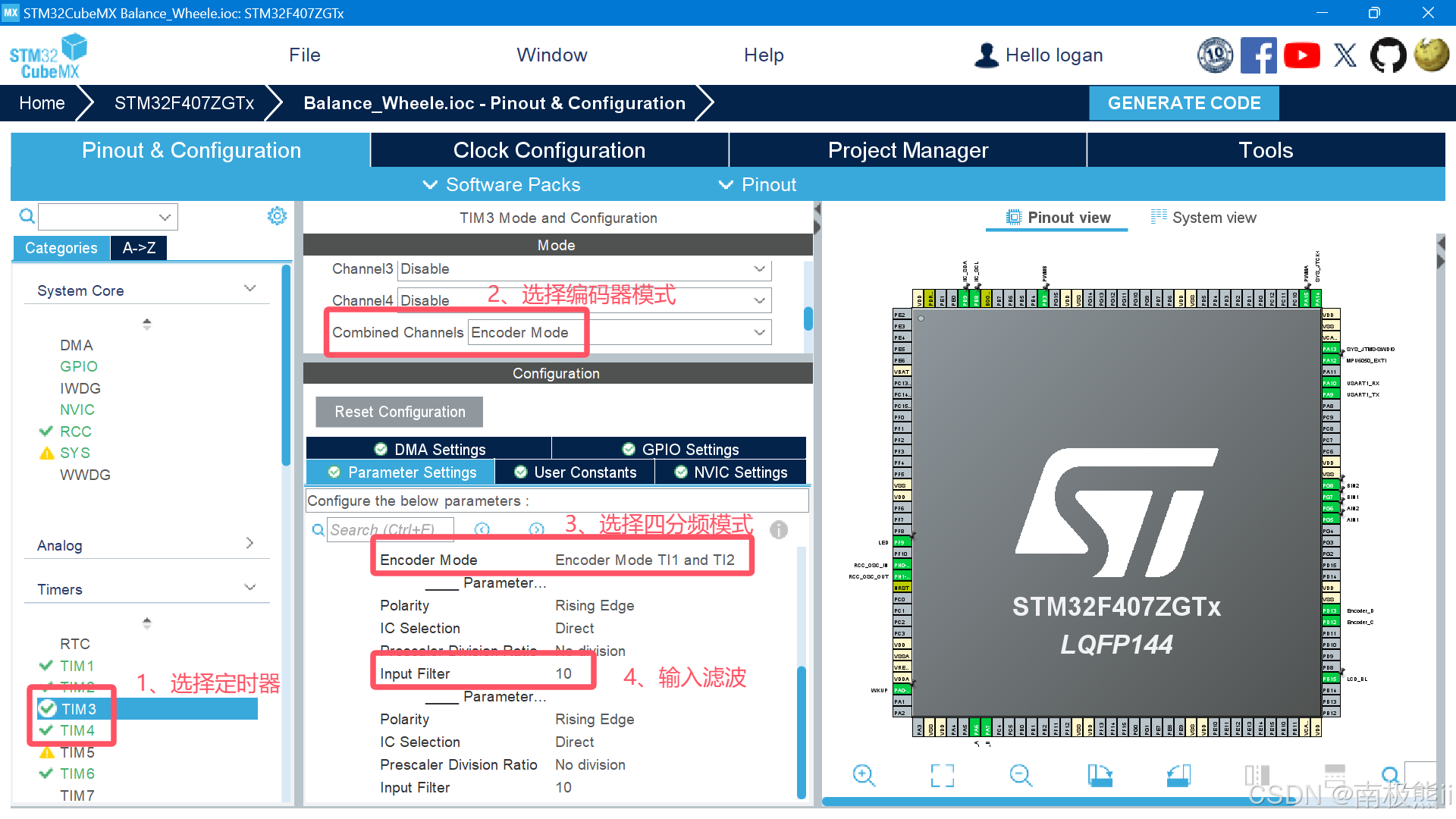
2、配置左右马达编码器TIM3\4
Encoder Mode Tl1 and Tl2: 四分频模式,精度更高。有关编码器的更多内容,详见【STM32+HAL】直流电机PID控制
**Input Filter:**输入滤波,平滑曲线
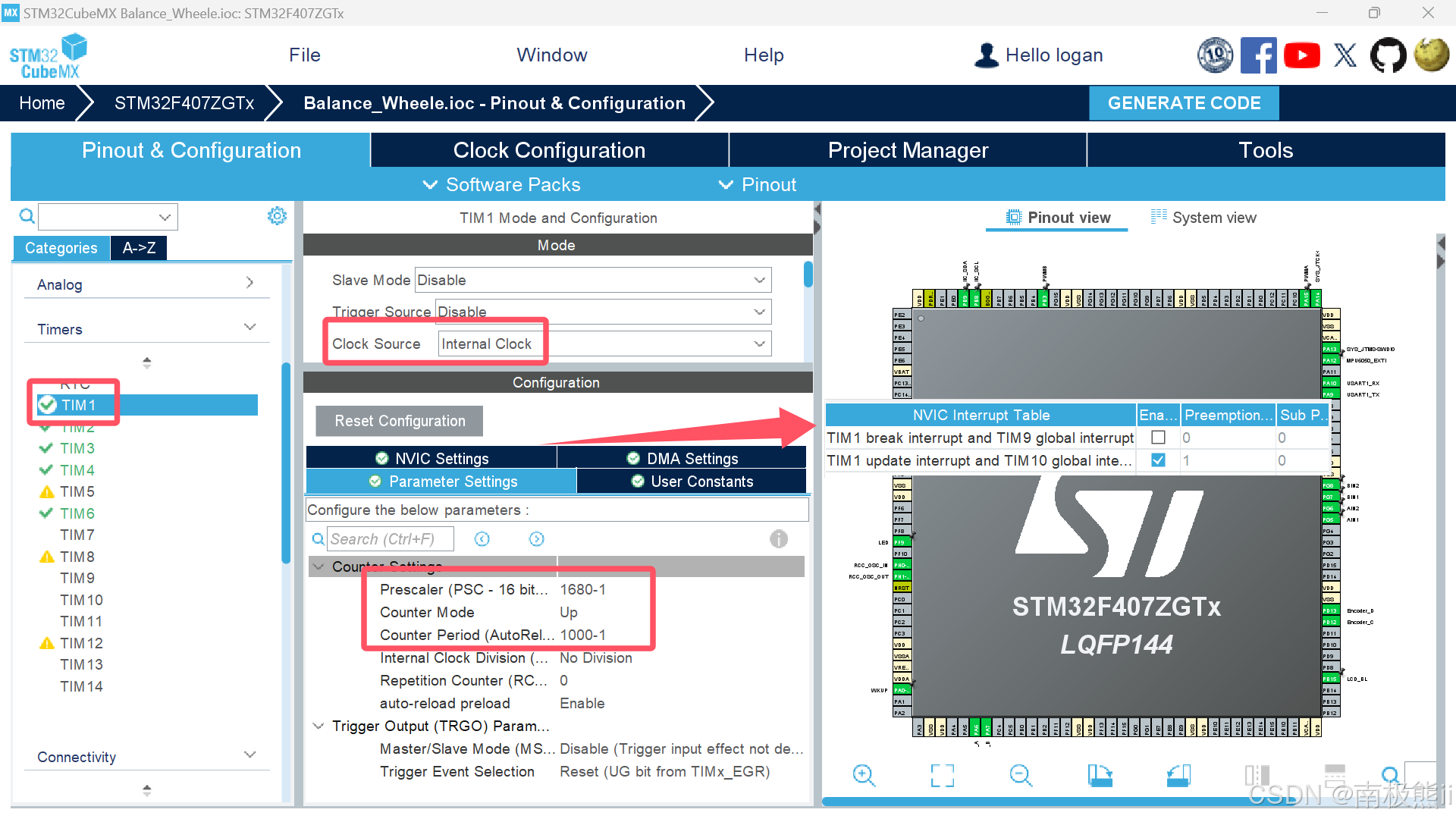
3、配置10ms控制定时器TIM1
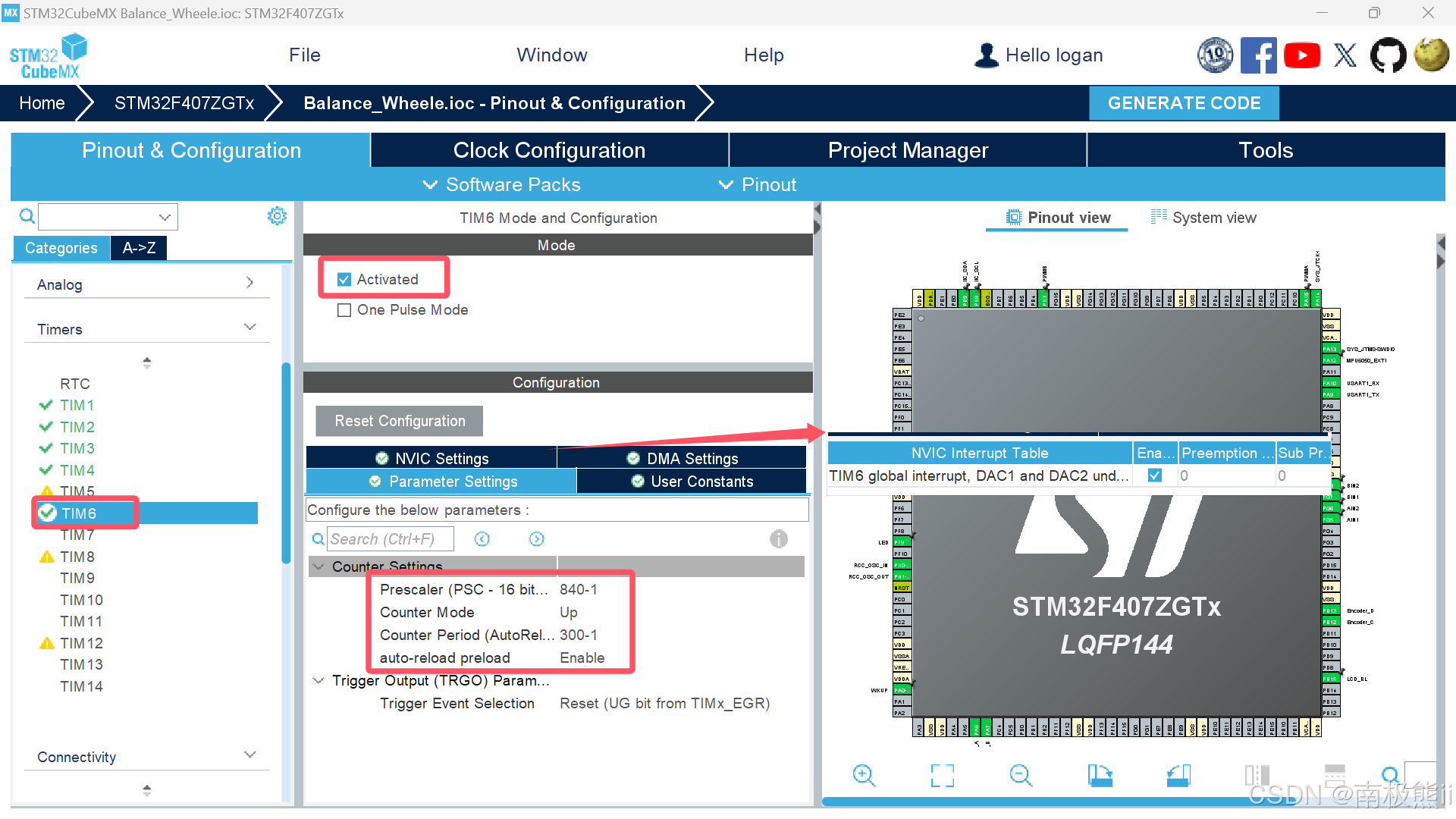
4、配置5ms读取角度及编码值定时器TIM6
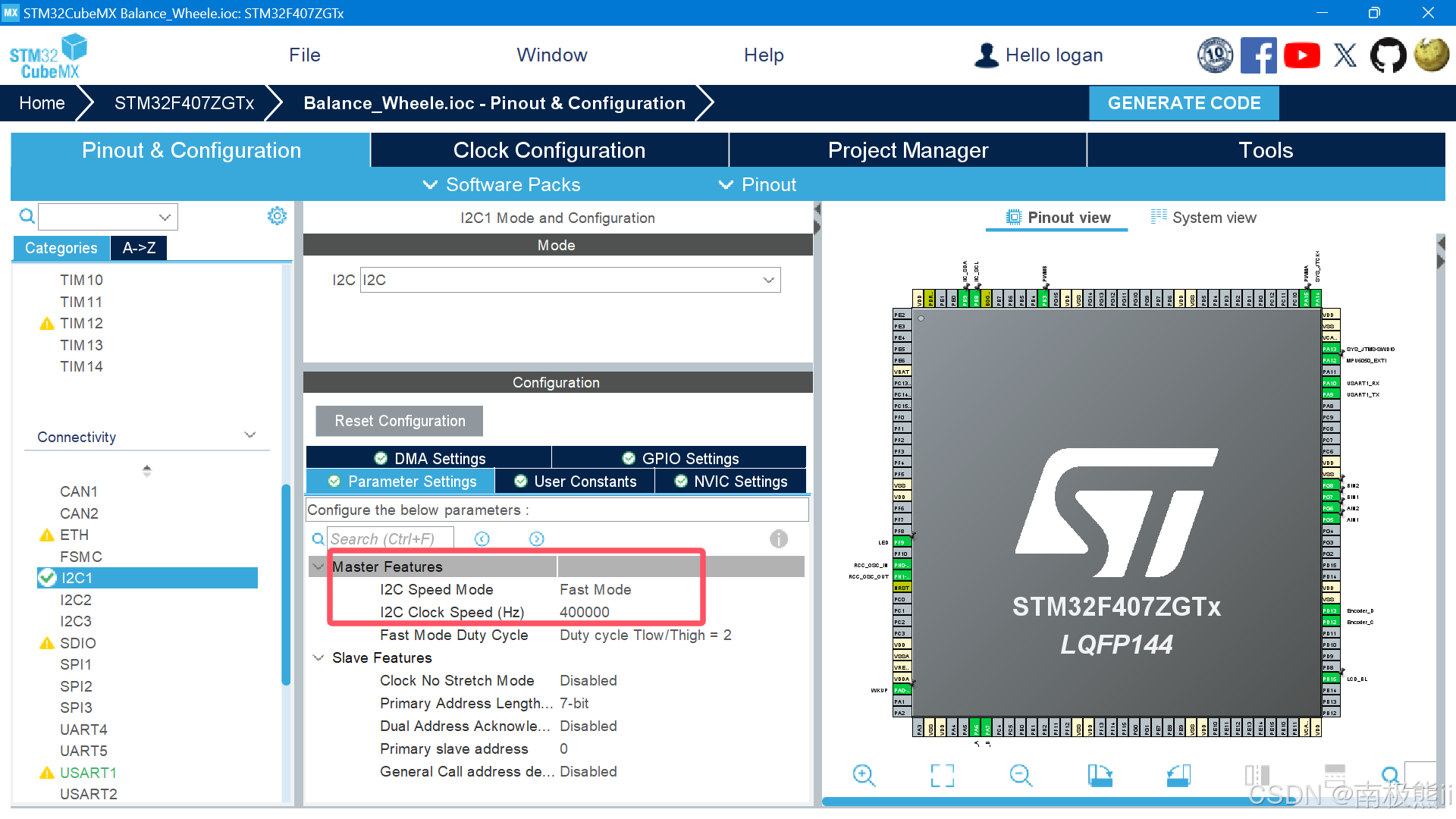
5、配置IIC外设与MPU6050通信
建议将引脚配置为上拉模式,并选择快速模式,使通信更稳定。
至此,CubeMX配置完毕。
五、Keil填写代码
1、MPU6050
有关MPU6050读取角度值、四元数求解以及滤波操作,详见【STM32+HAL】姿态传感器陀螺仪MPU6050模块
这里仅附读取角度的代码,其余代码基本一致。
cpp
/**************************************************************************
Function: Get angle
Input : way:The algorithm of getting angle 1:DMP 2:kalman 3:Complementary filtering
Output : none
函数功能:获取角度
入口参数:无
返回 值:无
**************************************************************************/
void Get_Angle(void)
{
MpuGetData(); //读取加速度、角速度、倾角
GetAngle(&MPU6050,&Angle,0.003f);
Angle_Balance = Roll; //更新平衡倾角,前倾为正,后倾为负
Gyro_Balance = gyro0; //更新平衡角速度,前倾为正,后倾为负
// printf("%.1f,%.1f\r\n",Angle_Balance, Gyro_Balance);
}2、读取编码值
马达编码值的具象表现为定时器的计数值,每当读取一次后,就需要对其进行清零操作,以保证下次读数的准确性。
可以把编码值想象为马达转过的距离,编码值越大,转过的距离越远。此时设置定时一小段时间读取这段时间走过的距离值,即可将此段距离值等效为速度值。
当然,这个数值不是马达的真实转速,不过在程序里我们只需要一个线性量,所以可以简单处理。
cpp
/**************************************************************************
Function: Read encoder count per unit time
Input : TIMX:Timer
Output : none
函数功能:单位时间读取编码器计数
入口参数:TIMX:定时器
返回 值:速度值
**************************************************************************/
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 3: Encoder_TIM = (short)TIM3 -> CNT; TIM3 -> CNT = 0;break;
case 4: Encoder_TIM = (short)TIM4 -> CNT; TIM4 -> CNT = 0;break;
default: Encoder_TIM = 0;
}
return Encoder_TIM;
}3、平衡环
Middle_angle为MPU6050保持水平时程序返回的当前角度值,此值未必为0,需要自己测量。
将此函数计算出来的数值赋值给定时器的CCR后,即可实现小车,但此时小车不会静止在一个位置,会朝着一个方向做匀速直线运动,所以我们需要再加上位置环,使其在一个位置实现平衡。
cpp
/**************************************************************************
Function: Vertical PD control
Input : Angle:angle;Gyro:angular velocity
Output : none
函数功能:平衡环、速度环PD控制
入口参数:Angle:角度;Gyro:角速度
返回 值:无
**************************************************************************/
int Balance(float Angle,float Gyro)
{
float Balance_Kp = 100, Balance_Kd = 2; //直立环PD参数
float Angle_bias, Gyro_bias;
int balance;
Angle_bias = Middle_angle - Angle; //求出平衡的角度中值 和机械相关
Gyro_bias = 0 - Gyro;
balance = Balance_Kp * Angle_bias + Balance_Kd * Gyro_bias; //计算平衡控制的电机PWM
return balance;
}4、位置环
稳定在一个位置的本质即左右马达的速度为0,故这里的位置环也即速度环。
代码不难,只加了几个滤波和积分限幅,大家自行理解吧!
cpp
/**************************************************************************
Function: Speed PI control
Input : encoder_left:Left wheel encoder reading;encoder_right:Right wheel encoder reading
Output : Speed control PWM
函数功能:速度控制PWM
入口参数:encoder_left:左轮编码器读数;encoder_right:右轮编码器读数
返回 值:速度控制PWM
**************************************************************************/
int Velocity(int encoder_left,int encoder_right)
{
float Velocity_Kp = 5, Velocity_Ki = 1.8; //速度环PI参数
static float velocity, Encoder_Least, Encoder_bias;
static float Encoder_Integral;
if(Flag_Stop == 1) Encoder_Integral = 0; //电机关闭后清除积分
/*=================速度PI控制器===================*/
Encoder_bias *= 0.8; //一阶低通滤波器
Encoder_Least = 0 - (encoder_left + encoder_right); //获取最新速度偏差==测量速度(左右编码器之和)-目标速度(此处为零)
Encoder_bias += Encoder_Least * 0.2; //上次偏差的0.8 + 本次偏差的0.2,减缓速度差值,减少对直立的干扰
Encoder_Integral += Encoder_bias; //积分出位移 积分时间:10ms
if(Encoder_Integral > 10000) Encoder_Integral = 10000; //积分限幅
if(Encoder_Integral < -10000) Encoder_Integral = -10000; //积分限幅
velocity = Encoder_bias * Velocity_Kp + Encoder_Integral * Velocity_Ki; //速度控制
return velocity;
}5、赋值
将两环计算出来的数值相加就是所求数值。
赋值函数中的宏定义为控制马达转动方向引脚:
AIN11,AIN20------AIN1为高电平,AIN2为低电平,此时左马达正转;
AIN10,AIN21------AIN1为低电平,AIN2为高电平,此时左马达反转 ... ... 其余同理
cpp
#define AIN11 HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_SET);
#define AIN10 HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);
#define AIN21 HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET);
#define AIN20 HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_RESET);
#define BIN11 HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_SET);
#define BIN10 HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET);
#define BIN21 HAL_GPIO_WritePin(BIN2_GPIO_Port,BIN2_Pin,GPIO_PIN_SET);
#define BIN20 HAL_GPIO_WritePin(BIN2_GPIO_Port,BIN2_Pin,GPIO_PIN_RESET);
/**************************************************************************
Function: Control function
Input : none
Output : none
函数功能:所有的控制代码都在这里面
入口参数:无
返回 值:无
**************************************************************************/
void Control(void)
{
int Balance_Pwm, Velocity_Pwm = 0; //平衡环PWM变量,速度环PWM变量
int Motor_Left, Motor_Right; //位置环PWM变量
Balance_Pwm = Balance(Angle_Balance, Gyro_Balance); //平衡PID控制 Gyro_Balance平衡角速度极性:前倾为正,后倾为负
// Velocity_Pwm = Velocity(Encoder_Left, Encoder_Right);//速度环PID控制
/* 记住,速度反馈是正反馈,就是小车快的时候要慢下来就需要再跑快一点 */
Motor_Left = PWM_Limit(Balance_Pwm + Velocity_Pwm, Limit, -Limit);
Motor_Right = PWM_Limit(Balance_Pwm + Velocity_Pwm, Limit, -Limit); //PWM限幅
Set_Pwm(Motor_Left, Motor_Right);
}
/**************************************************************************
Function: Assign to PWM register
Input : motor_left:Left wheel PWM;motor_right:Right wheel PWM
Output : none
函数功能:赋值给PWM寄存器
入口参数:左轮PWM、右轮PWM
返回 值:无
**************************************************************************/
void Set_Pwm(int motor_left,int motor_right)
{
if(motor_left > 0) //前进
{
AIN11;
AIN20;
}
else //后退
{
AIN10;
AIN21;
}
PWMA = myabs(motor_left);
if(motor_right > 0) //前进
{
BIN11;
BIN20;
}
else //后退
{
BIN10;
BIN21;
}
PWMB = myabs(motor_right);
}6、定时器回调函数
这里的按键控制程序的开启与暂停。
cpp
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
/* MPU6050读取 */
if(htim -> Instance == TIM6){
Get_Angle(); //更新姿态 5ms读取一次
Encoder_Left = Read_Encoder(3); //读取左轮编码器的值,前进为正,后退为负
Encoder_Right = Read_Encoder(4); //读取右轮编码器的值,前进为正,后退为负
}
/* 控制定时器 */
if (htim -> Instance == TIM1){
Control();
}
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(HAL_GPIO_ReadPin(WKUP_GPIO_Port,WKUP_Pin) == GPIO_PIN_SET){
HAL_Delay(20); //延时消抖
if(HAL_GPIO_ReadPin(WKUP_GPIO_Port,WKUP_Pin) == GPIO_PIN_SET){
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
Flag_Stop = !Flag_Stop;
}
}
}
/* USER CODE END 4 */7、初始化程序
最后,记得对程序进行初始化。
cpp
/* USER CODE BEGIN 2 */
/* MPU6050初始化 */
MPU_Init();
HAL_TIM_Base_Start_IT(&htim6);
HAL_Delay(500);
/* PWM初始化 */
HAL_TIM_Encoder_Start(&htim3, TIM_CHANNEL_ALL);
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_Base_Start_IT(&htim1);
/* USER CODE END 2 */六、程序源码
夸克网盘:我用夸克网盘分享了「Balance_Wheele」提取码:cuMG
百度网盘:通过百度网盘分享的文件:Balance_Wheele 提取码:6666
GItee:Balance_Wheele
CSDN:Balance-Wheele
七、结语
本人能力有限,代码未必是最优解,若有可改进之处望在评论区留言。
如有小伙伴想交流学习心得,欢迎加入群聊751950234,群内不定期更新代码,以及提供本人博客所有源码