UR机械臂的ROS驱动安装配置官方教程详解------机器人抓取系统基础系列(一)
- 前言
- [1 准备工作](#1 准备工作)
- [2 电脑安装驱动](#2 电脑安装驱动)
- [3 机器人端设置](#3 机器人端设置)
- [4 电脑和机器人的通讯IP设置](#4 电脑和机器人的通讯IP设置)
- [5 启动机械臂的ROS驱动](#5 启动机械臂的ROS驱动)
- [6 MoveIt控制机械臂](#6 MoveIt控制机械臂)
- 总结
前言
本文在官方Github教程的基础上,详细阐述了UR机械臂的ROS驱动安装的步骤,为广大从事机器人相关工作的人员作参考。
官方安装教程地址为:https://github.com/UniversalRobots/Universal_Robots_ROS_Driver
1 准备工作
首先是环境的准备,准备操作系统Ubuntu20.04和对应的ROS Noetic版本安装;
其中ROS的安装教程参考官网的安装教程:https://wiki.ros.org/noetic/Installation/Ubuntu

本文使用的机械臂硬件为UR5e,其他型号的机械臂依此类推。
此外还需要准备一个U盘(本文第3部分使用),一根网线(本文第4部分使用)。
2 电脑安装驱动
ur_robot_driver驱动安装过程如下:
python
# create a catkin workspace 创建工作空间
$ mkdir -p catkin_ws/src && cd catkin_ws
# clone the driver 下载驱动
$ git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver
# clone the description. Currently, it is necessary to use the melodic-devel branch. 下载机器人文件
$ git clone -b melodic-devel https://github.com/ros-industrial/universal_robot.git src/universal_robot
# install dependencies 安装依赖
$ sudo apt update -qq
$ rosdep update
$ rosdep install --from-paths src --ignore-src -y
# build the workspace 编译工作空间
$ catkin_make
# activate the workspace (ie: source it) 激活工作空间
$ source devel/setup.bash3 机器人端设置
在真实机器人上使用ur_robot_driver需要在机器人示教器上安装externalcontrol-x.x.x.urcap,下载地址:https://github.com/UniversalRobots/Universal_Robots_ExternalControl_URCap/releases。
externalcontrol-x.x.x.urcap的安装教程参考https://github.com/UniversalRobots/Universal_Robots_ROS_Driver/blob/master/ur_robot_driver/doc/install_urcap_e_series.md
这部分的官方教程非常详细,不再累述,简单阐述步骤如下:
-
下载urcap到一个U盘中;
-
将U盘插入示教器,安装urcap并重启机器人;
-
重启之后在示教器的Installation选项卡会出现URCaps-External Control,此处设置电脑主机IP和通讯端口,这里先只做检查,如何查询和设置IP在下一节介绍(此处图片中填写的IP地址不正确);

-
再检查Program选项卡,可以插入URCaps-External Control程序节点。

4 电脑和机器人的通讯IP设置
这里我们使用网线连接电脑和机器人,为控制指令的传输做准备,设置电脑和机器人的IP地址在同一局域网下。
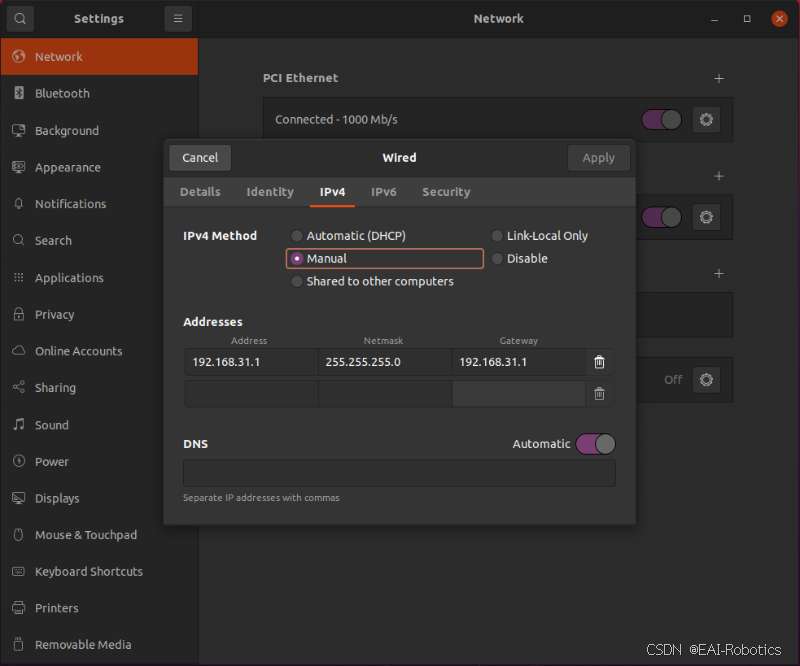
Ubuntu电脑端的IP地址的设置截图如下,步骤为:Settings - Network - Wired settings - IPv4 - Manual 。
电脑ip地址:192.168.31.xxx (本文设置为192.168.31.1)
子网掩码:255.255.255.0
网关:192.168.31.1
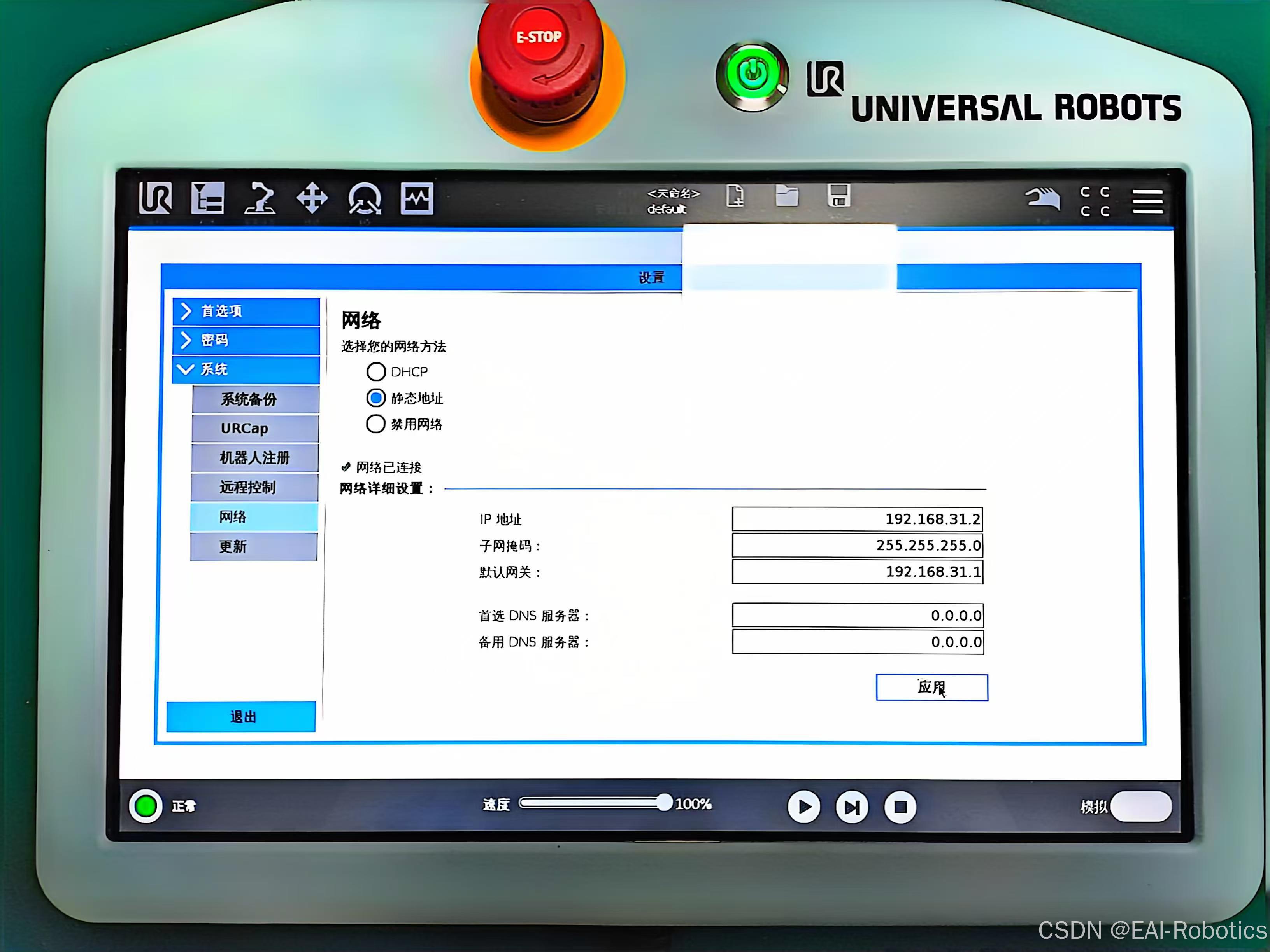
机器人示教器的IP设置如下图所示,步骤为设置-系统-网络-静态地址。
机器人ip地址:192.168.31.xxx (本文设置为192.168.31.2)
子网掩码:255.255.255.0
网关:192.168.31.1
注意机器人端除了要设置机器人的IP地址,还需要填写电脑主机的地址,参考本文第3部分第三步,找到Installation选项卡下的URCaps-External Control,设置与机器人通讯的电脑主机地址,本文电脑端设置为192.168.31.1,通讯端口填写50002。
如果机器人和电脑连接成功,示教器上会显示网络已连接,亦或者使用Ping指令测试。
python
$ Ping 192.168.31.25 启动机械臂的ROS驱动
每个 UR 机器人都在出厂前进行了校准,以提供精确的正向和反向运动学参数。若要在 ROS 中利用此功能,首先必须从机器人中提取校准信息。
python
# calibration, 本文中<robot_ip>:=192.168.31.2
$ roslaunch ur_calibration calibration_correction.launch robot_ip:=<robot_ip> target_filename:="${HOME}/my_robot_calibration.yaml"然后就是机器人的启动,其指令如下所示。
其中<robot_type> 为机器人的型号,如 ur3, ur5, ur10, ur3e, ur5e, ur10e, ur16e, ur20, ur30。
并加载上一步提取出的运动学校准信息文件。
python
# quick start
$ roslaunch ur_robot_driver <robot_type>_bringup.launch robot_ip:=192.168.31.2 kinematics_config:=$(rospack find ur_calibration)/etc/ur5e_example_calibration.yaml在电脑端启动机器人之后,也要运行机器人示教器端的Program选项卡中URCaps-External Control程序节点(本文第3部分设置机器人端)。
至此,机器人就完全准备好了接受控制指令。
6 MoveIt控制机械臂
如果此前没有安装过MoveIt,那么首先安装MoveIt:
python
$ sudo apt install ros-noetic-moveit之后就是打开MoveIt和Rviz控制机械臂运动:
python
$ roslaunch ur5e_moveit_config moveit_planning_execution.launch
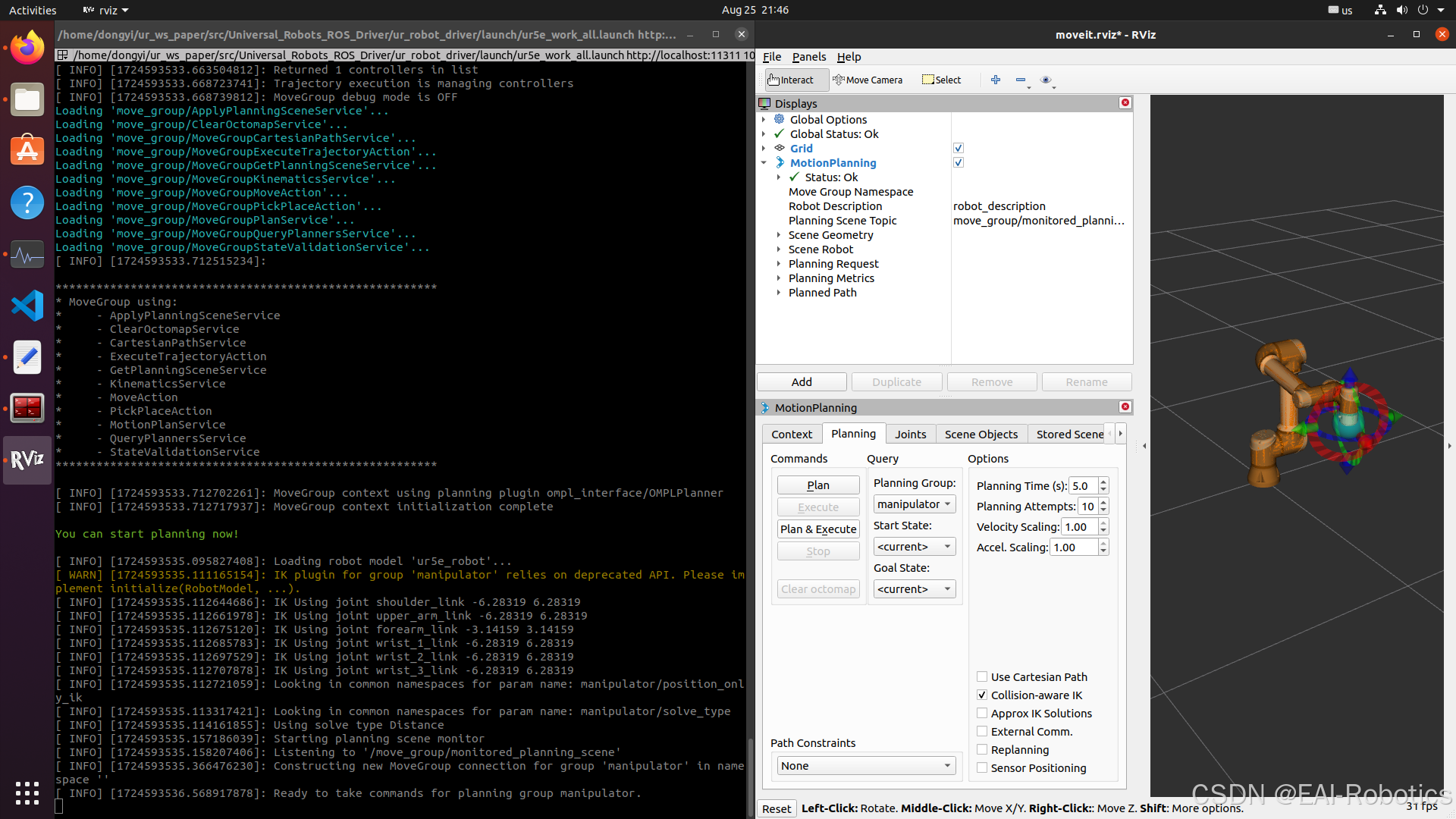
$ roslaunch ur5e_moveit_config moveit_rviz.launchRviz启动之后的界面如下图所示,此时可以在Rviz界面拖动机械臂末端的虚拟球体到新的位姿,然后点击界面上的"Plan"就可以看到规划路径,点击"Excute"则仿真器和真实机械臂都会执行运动到新的位姿。
此时保持手在紧急停止按钮上,保证人身安全并避免机器人发生碰撞。
实际上,机器人启动的两个launch指令和MoveIt控制机械臂的两个launch指令可以集成到一个launch文件中,这样方便下一次启动和控制机械臂。集成的launch文件如下所示:
python
<?xml version="1.0"?>
<launch>
<arg name="robot_ip" doc="The IP address at which the robot is reachable."/>
<!-- calibration of the robot -->
<include file="$(find ur_calibration)/launch/calibration_correction.launch">
<arg name="robot_ip" value="192.168.31.2" />
<arg name="target_filename" value= "$(find ur_robot_driver)/config/my_robot_calibration.yaml"/>
</include>
<!-- bring up the real robot -->
<include file="$(find ur_robot_driver)/launch/ur5e_bringup.launch">
<arg name="robot_ip" value="192.168.31.2" />
<arg name="kinematics_config" value= "$(find ur_robot_driver)/config/my_robot_calibration.yaml"/>
</include>
<!-- moveit -->
<include file="$(find ur5e_moveit_config)/launch/moveit_planning_execution.launch">
</include>
<!-- rviz -->
<include file="$(find ur5e_moveit_config)/launch/moveit_rviz.launch" >
<arg name="config" value="$(find ur5e_moveit_config)/launch/moveit.rviz" />
</include>
</launch>假如将集成的launch文件命名为ur5e_work_all.launch,则下次只需运行指令:
python
$ roslaunch ur_robot_driver ur5e_work_all.launch注:如安装过程中遇到Bug,可能的解决方法包括但不限于:
1)访问官网Bug总结https://github.com/UniversalRobots/Universal_Robots_ROS_Driver/issues,寻找答案;
2)利用Google或者Bing搜索引擎直接搜索error内容;
3)在本博文的评论区进行交流等;
总结
以上就是今天要讲的内容,本文详细介绍了UR机械臂的ROS驱动安装官方教程,并进行了一定的扩展补充,铁子们有问题可以评论区交流。
下一小节将会对如何编写MoveIt控制程序控制机械臂话题展开,敬请期待!