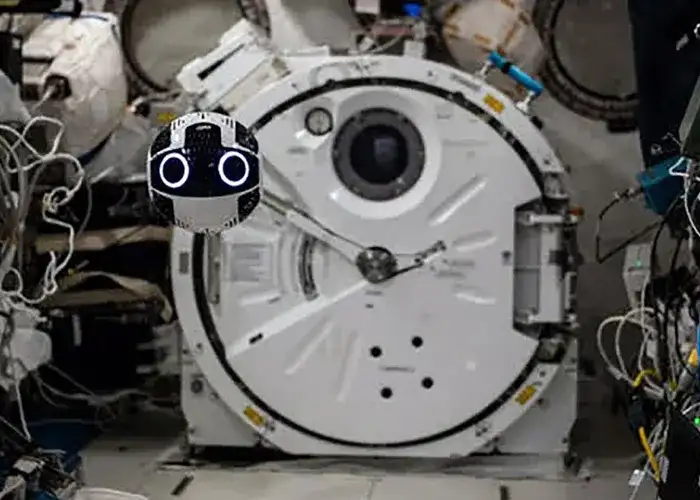
近日,日本宇宙航空研究开发机构(JAXA)宣布,在国际空间站(ISS)实验舱"希望号"(Kibo)上部署的一款移动摄像机器人将采用Epson M-G370系列惯性测量单元(IMU)。IMU是一种能够检测物体运动状态的装置,通过测量加速度和角速度来确定物体的空间位置和姿态。这种技术对于在缺乏固定参照物的空间环境中尤为重要。
自2023年6月以来,"内部球形相机2号"(Internal Ball Camera 2)已经在"希望号"实验舱内进行了功能性验证。这款自由飞行的摄像机器人作为一款机载无人机,由地面控制中心远程操控,可在空间站内部自由移动。它设计用于自动离站执行任务,并在完成后自主返回充电站进行电池充电。
在微重力环境中,机器人必须精确地估计自身的位置(沿X、Y、Z轴)和旋转姿态(俯仰、偏航、滚转)。通过结合视觉同时定位与地图构建(VSLAM)技术和Epson M-G370系列IMU的数据,该机器人成功实现了这一目标。这一技术组合使得机器人能够在没有明显地标的空间站内部准确导航。

Epson M-G370系列IMU凭借其小巧轻便的设计和卓越的精度,成为助力机器人在飞行过程中准确估算空间位置和旋转姿态的理想选择。其主要特点包括:
- 高精度和出色的稳定性:配备Epson原创的晶体陀螺仪传感器,确保了在极端环境下的可靠运行。
- 低陀螺仪偏差:陀螺仪偏差不稳定度低至0.8°/√h,角度随机游走范围在0.06至0.03°/√h之间,保证了高度的测量准确性。
- 体积小巧:重量仅有10克,便于集成到各种小型设备中。
- 低功耗设计:工作电压为3.3V,电流消耗仅为16mA,适合长时间运行任务。
这些特点使得Epson IMU非常适合在资源有限且要求高性能的空间任务中使用。

此次Epson IMU被JAXA选中,不仅彰显了其在航天领域的卓越性能,还为未来空间探索任务提供了可靠的技术保障。随着技术的不断进步,IMU 在航天领域的应用将会更加广泛,为人类的太空探索活动带来更多可能性。未来,我们可以期待看到更多先进的 IMU 技术应用于各类航天器,推动空间科学的发展。