题意
有一个点仙人掌图(每个点都只属于至多一个简单环),给出 k k k 个询问,问点 x x x 到点 y y y 有多少条简单路径(经过的边不能重复,点可以)。
思路
一看这个样例输出,就感觉有猫腻,肯定和 2 2 2 有关。我们画出一个仙人掌图: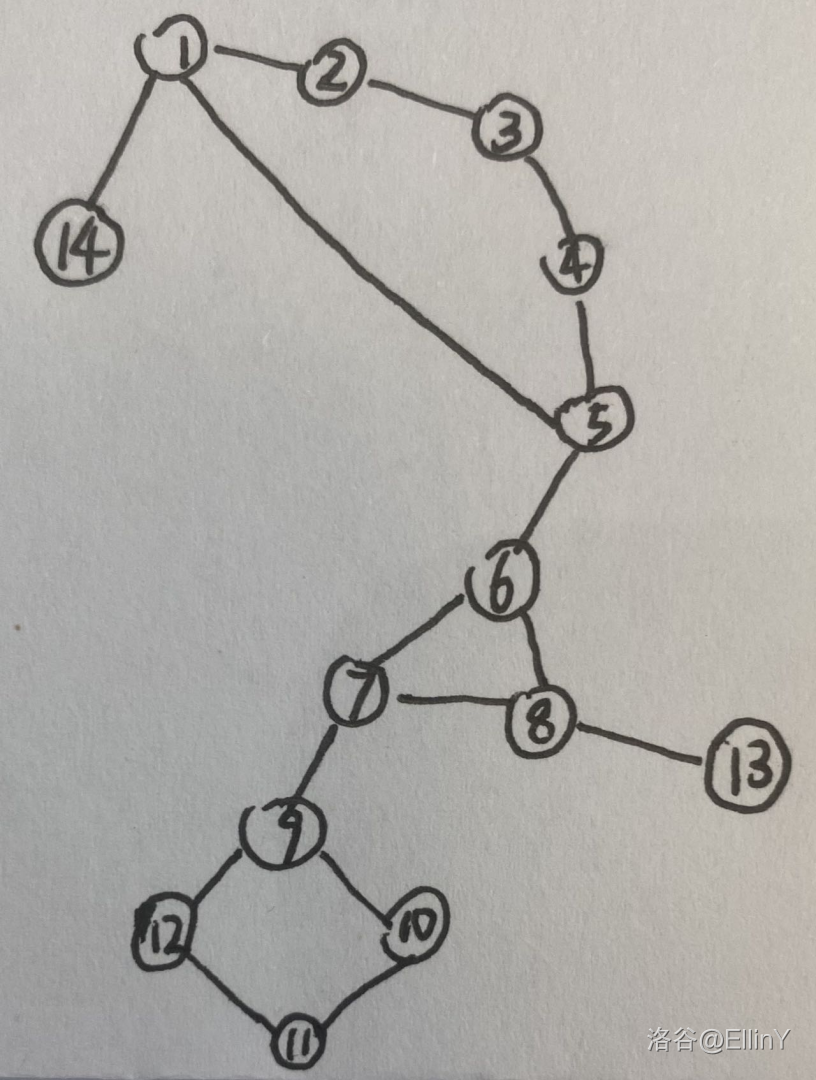 图中有三个简单环:1,2,3,4,5;6,7,8;9,10,11,12。如果问点 3 到点 8 的路径,有 4 条:3,4,5,6,8;3,2,1,5,6,8;3,4,5,6,7,8;3,2,1,5,6,7,8。发现这个路径可以分为三段:第一段在第一个环里从 3 走到 5,有两种走法;第二段从 5 走到 6,进入第二个环;第三段在第二个环里从 6 走到 8。那如果是问 3 到 6 呢?是不是没有第三段了?简单路径只是边不能重复,所以从 6 走到 6 有两种走法,绕一圈(6,7,8,6)或者直接停在 6。走过的边的集合不同则路径不同,所以顺时针绕和逆时针绕没有区别。从 5 走到 6 也是 4 种。可以再模拟一下从 3 走到 12,发现是 8 种。得出结论:经过了几个环,就是 2 的几次方,这里的环包括起点和终点所在的环。
图中有三个简单环:1,2,3,4,5;6,7,8;9,10,11,12。如果问点 3 到点 8 的路径,有 4 条:3,4,5,6,8;3,2,1,5,6,8;3,4,5,6,7,8;3,2,1,5,6,7,8。发现这个路径可以分为三段:第一段在第一个环里从 3 走到 5,有两种走法;第二段从 5 走到 6,进入第二个环;第三段在第二个环里从 6 走到 8。那如果是问 3 到 6 呢?是不是没有第三段了?简单路径只是边不能重复,所以从 6 走到 6 有两种走法,绕一圈(6,7,8,6)或者直接停在 6。走过的边的集合不同则路径不同,所以顺时针绕和逆时针绕没有区别。从 5 走到 6 也是 4 种。可以再模拟一下从 3 走到 12,发现是 8 种。得出结论:经过了几个环,就是 2 的几次方,这里的环包括起点和终点所在的环。
实现
由于这张图是一个仙人掌,所以当把每个环都缩成一个点的时候,图就会变成一棵树。我们先用 dfs 找到所有环,在同一个环里的用 b i b_i bi 标记为相同的数值(数值从 n + 1 n+1 n+1 开始,方便区分原来的点和缩点得到的点)。重新建图,对树进行前缀和,用 s u m i sum_i sumi 表示从根节点( b 1 b_1 b1)到 i i i 有多少个环,用 dfs 预处理。要统计 x x x 到 y y y 有几个环,就计算 s u m x + s u m y − 2 ∗ s u m lca ( x , y ) + ( lca ( x , y ) > n ) sum_x+sum_y-2*sum_{\operatorname{lca}(x,y)}+(\operatorname{lca}(x,y)>n) sumx+sumy−2∗sumlca(x,y)+(lca(x,y)>n)。原理: s u m x + s u m y sum_x+sum_y sumx+sumy 包括了 x x x 到 lca ( x , y ) \operatorname{lca}(x,y) lca(x,y) 的环, y y y 到 lca ( x , y ) \operatorname{lca}(x,y) lca(x,y) 的环和 lca ( x , y ) \operatorname{lca}(x,y) lca(x,y) 到根的环乘上 2。减掉两倍的 lca ( x , y ) \operatorname{lca}(x,y) lca(x,y) 到根的环的数量之后还要再加上 lca ( x , y ) \operatorname{lca}(x,y) lca(x,y) 的环。 lca ( x , y ) \operatorname{lca}(x,y) lca(x,y) 用倍增法就可以啦。
代码
温馨提示:一定要用 scanf,否则会 TLE(本人以为是找环太慢,换了一种写法 qwq)。找环过程建议手动模拟帮助理解。
#include<bits/stdc++.h>
using namespace std;
#define maxlog 18
#define mod 1000000007
int n,m,x,y,k,b[100005],sum[200005],tot;
int anc[200005][20],dep[200005];
vector<int> go[100005],e[200005],st;
long long mi[100005];
bool vis[100005];
void dfs(int ps,int fa){
if(vis[ps]){
bool flag=0;
for(int i=0;i<st.size();i++){
if(st[i]==ps) flag=1,tot++;
if(flag) b[st[i]]=tot;
}
return;
}
vis[ps]=1;
st.push_back(ps);
for(auto g:go[ps]){
if(g==fa) continue;
dfs(g,ps);
}
st.pop_back();
}
void pre(int ps,int fa){//sum 和 LCA 的前处理
sum[ps]=sum[fa]+(ps>n);
dep[ps]=dep[fa]+1;
anc[ps][0]=fa;
for(int i=1;i<maxlog;i++)
anc[ps][i]=anc[anc[ps][i-1]][i-1];
for(auto g:e[ps]) if(g!=fa) pre(g,ps);
}
int lca(int x,int y){
if(x==y) return x;
if(dep[x]<dep[y]) swap(x,y);
for(int i=maxlog-1;i>=0;i--)
if(dep[anc[x][i]]>=dep[y]) x=anc[x][i];
if(x==y) return x;
for(int i=maxlog-1;i>=0;i--)
if(anc[x][i]!=anc[y][i])
x=anc[x][i],y=anc[y][i];
return anc[x][0];
}
int main(){
scanf("%d%d",&n,&m);
tot=n;mi[0]=1;
for(int i=1;i<=n;i++){
mi[i]=mi[i-1]*2%mod;
b[i]=i;
}
for(int i=1;i<=m;i++){
scanf("%d%d",&x,&y);
go[x].push_back(y);
go[y].push_back(x);
}
dfs(1,0);
for(int i=1;i<=n;i++)
for(auto g:go[i])
if(b[i]!=b[g])
e[b[i]].push_back(b[g]);
pre(b[1],0);
scanf("%d",&k);
for(int i=1;i<=k;i++){
scanf("%d%d",&x,&y);
x=b[x],y=b[y];
int z=lca(x,y);
int res=sum[x]+sum[y]-2*sum[z]+(z>n);
printf("%lld\n",mi[res]);
}
return 0;
}