写在前面:
🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落 。📝
个人主页 :清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒
若您觉得内容有价值,还请评论告知一声,以便更多人受益。
转载请注明出处,尊重原创,从我做起。👍 点赞、评论、收藏 ,三连走一波,让我们一起养成好习惯😜
在这里,您将收获的不只是技术干货 ,还有思维的火花!📚 系列专栏:【Linux】系列,带您深入浅出,领略控制之美。🖊
愿我的分享能为您带来启迪,如有不足,敬请指正,让我们共同学习,交流进步!🎭 人生如戏,我们并非能选择舞台和剧本,但我们可以选择如何演绎 🌟
感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行~~~
文章目录
- 引言
- 一、源码安装方法
-
- [1.1 下载摄像头驱动usb_cam](#1.1 下载摄像头驱动usb_cam)
- [1.2 查找FFmpeg库路径](#1.2 查找FFmpeg库路径)
- [1.3 添加FFmpeg库路径到CMakeLists.txt](#1.3 添加FFmpeg库路径到CMakeLists.txt)
- [1.4 编译usb_cam包](#1.4 编译usb_cam包)
- [1.5 修改usb_cam驱动配置](#1.5 修改usb_cam驱动配置)
- [1.6 修改launch文件](#1.6 修改launch文件)
- 二、软件包安装方法
-
- [2.1 安装ROS Melodic版本的usb_cam](#2.1 安装ROS Melodic版本的usb_cam)
- [2.2 安装相机标定功能包](#2.2 安装相机标定功能包)
- [2.3 安装UVC相机功能包](#2.3 安装UVC相机功能包)
- [2.4 启动摄像头节点](#2.4 启动摄像头节点)
- [2.5 处理摄像头连接问题](#2.5 处理摄像头连接问题)
- [2.6 相机启动警告处理](#2.6 相机启动警告处理)
- [2.7 相机标定方法](#2.7 相机标定方法)
- [2.8 查看相机话题和数据](#2.8 查看相机话题和数据)
- 三、总结
- 参考资料
引言
usb_cam是针对USB摄像头的ROS驱动包,简单来说就是得有这个功能包,才能在ROS中把摄像头打开。但是官网给出的目前最新版 usb_cam 已不再支持 ROS1,因此若想在 ubuntu18.04 上安装摄像头驱动 usb_cam,则需修改配置文件, 本篇博客介绍具体操作。
本篇博客提供两种安装方法:源码安装方法、软件包安装方法。
一、源码安装方法
1.1 下载摄像头驱动usb_cam
下载usb_cam文件见本博客置顶的资源。
参考以下方法,将下载到主机的驱动文件发送到虚拟机Ubuntu中:
虚拟机共享文件位置 /mnt/hgfs/Share
从官网下载的usb_cam切换到支持ROS1的master分支。
shell
git clone https://github.com/ros-drivers/usb_cam.git
cd usb_cam
git checkout master编译usb_cam会报错,提示链接不到FFmpeg相关的库文件
因此通过添加FFmpeg库路径到LD_LIBRARY_PATH来解决这些错误。
1.2 查找FFmpeg库路径
查找编译所需的文件位置
bash
locate libavcodec.so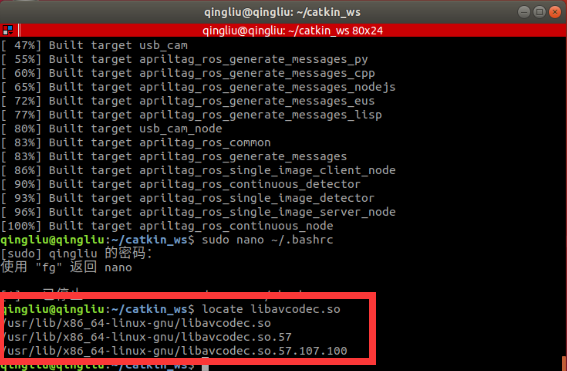
编辑~/.bashrc文件:打开终端,输入
css
sudo nano ~/.bashrc 在.bashrc文件末尾添加如下内容
bash
export LD_LIBRARY_PATH=/usr/lib/x86_64-linux-gnu:$LD_LIBRARY_PATH保存并关闭文件,然后执行以下命令来使更改立即生效:
bash
source ~/.bashrc1.3 添加FFmpeg库路径到CMakeLists.txt
CMakeLists.txt文件中的内容如下:
shell
cmake_minimum_required(VERSION 3.5)
project(test_ffmpeg)
set(CMAKE_LIBRARY_PATH "/usr/lib/x86_64-linux-gnu")
find_package(PkgConfig REQUIRED)
pkg_check_modules(AVCODEC REQUIRED libavcodec)
pkg_check_modules(AVUTIL REQUIRED libavutil)
pkg_check_modules(AVFORMAT REQUIRED libavformat)
pkg_check_modules(SWSCALE REQUIRED libswscale)
add_executable(test_ffmpeg test_ffmpeg.cpp)
target_link_libraries(test_ffmpeg
${AVCODEC_LIBRARIES}
${AVUTIL_LIBRARIES}
${AVFORMAT_LIBRARIES}
${SWSCALE_LIBRARIES}
)测试文件编译通过。
因此,在usb_cam文件夹下的CMakeLists.txt添加如下内容:
python
# 添加内容
set(CMAKE_LIBRARY_PATH "/usr/lib/x86_64-linux-gnu")
find_package(PkgConfig REQUIRED)
pkg_check_modules(AVCODEC REQUIRED libavcodec)
pkg_check_modules(AVUTIL REQUIRED libavutil)
pkg_check_modules(AVFORMAT REQUIRED libavformat)
pkg_check_modules(SWSCALE REQUIRED libswscale)
# 添加内容
target_link_libraries(${PROJECT_NAME}_node
${AVCODEC_LIBRARIES}
${AVUTIL_LIBRARIES}
${AVFORMAT_LIBRARIES}
${SWSCALE_LIBRARIES}
)1.4 编译usb_cam包
再次编译。
bash
catkin_make若编译出错,使用如下指令清理构建目录,并重新编译项目:
bash
cd ~/catkin_ws
rm -rf build/ devel/
catkin_make1.5 修改usb_cam驱动配置
找到自己的USB摄像头所对应的端口。

我的是/dev/video0 /dev/video1
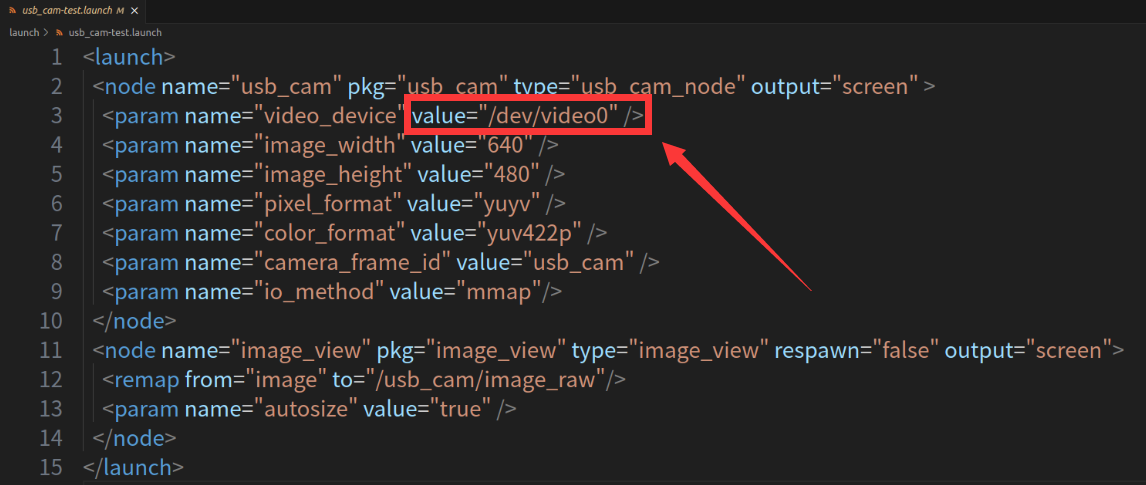
1.6 修改launch文件
在src/usb_cam目录下打开并编辑launch文件。
二、软件包安装方法
下面介绍一种使用软件包安装usb-cam的方法。
2.1 安装ROS Melodic版本的usb_cam
首先打开终端,输入:
shell
sudo apt-get install ros-melodic-usb-cam这里melodic应该根据自己Ubuntu系统进行灵活变换,例如我使用的Ubuntu18.04,那么我对应的就是melodic版本。
2.2 安装相机标定功能包
安装ROS Melodic版本的相机标定功能包。
bash
sudo apt-get install ros-melodic-camera-calibration相机标定是确定相机内部参数(如焦距、主点等)的过程,这对于处理从相机获得的图像数据非常重要。
2.3 安装UVC相机功能包
安装ROS Melodic版本的UVC相机功能包。
bash
sudo apt-get install ros-melodic-uvc-cameraUVC(Universal Video Class)是一种USB摄像头的标准,这个功能包允许ROS与UVC兼容的USB摄像头通信。
2.4 启动摄像头节点
驱动安装完成后,会自带一个launch文件,我们打开launch文件就可以打开摄像头。
启动名为usb_cam的ROS节点,并运行一个名为usb_cam-test.launch的launch文件。
shell
roslaunch usb_cam usb_cam-test.launch这个launch文件配置了如何使用USB摄像头获取图像,并包括其他相关参数设置。
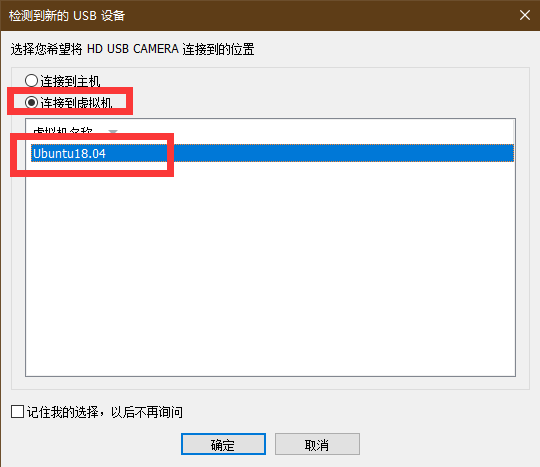
2.5 处理摄像头连接问题
此时,保证相机已经开机,并通过usb接口连接至电脑,若出现以下问题:
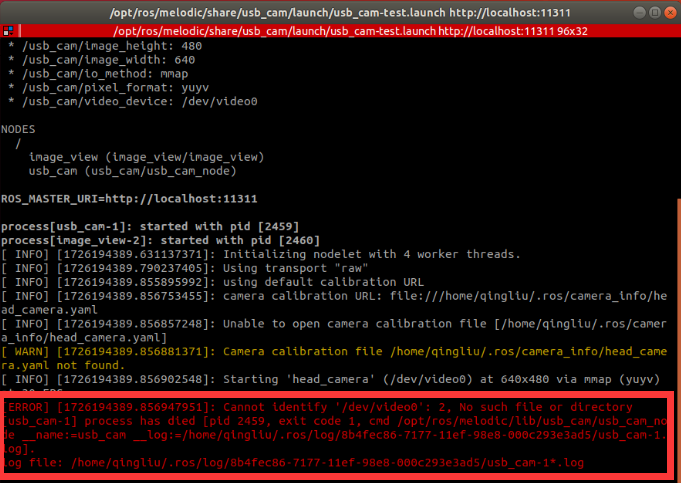
说明没有检测到USB摄像头,重新插入摄像头
2.6 相机启动警告处理
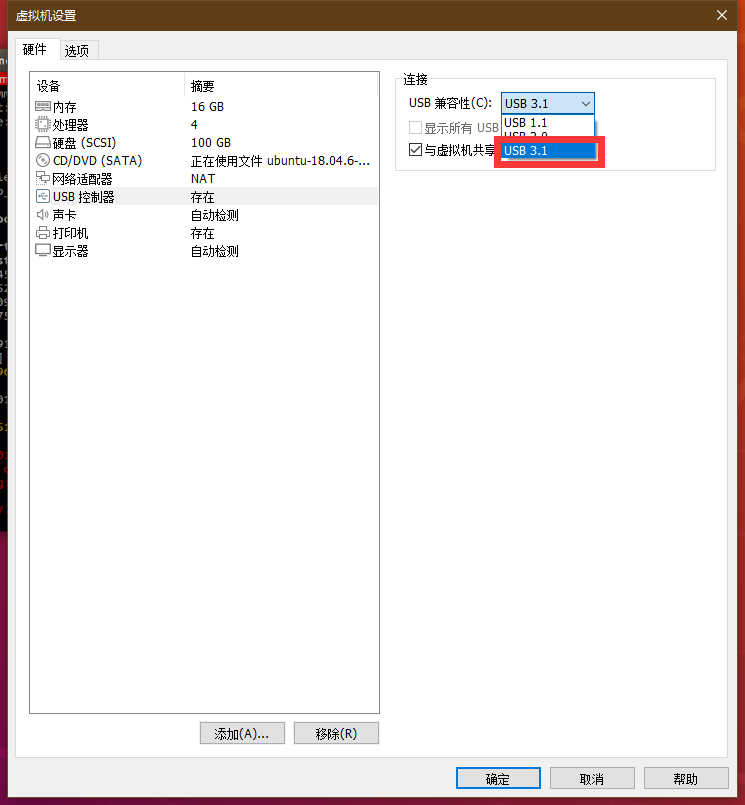
如果报错如下select timeout

说明USB兼容性选择错了,需要关闭虚拟机进行更改,点击编辑虚拟机,打开 USB 控制器,将 USB 兼容性改为USB 3.1,点击确定,重新打开虚拟机,再次运行即可打开摄像头。
出现以下画面,成功打开摄像头。

2.7 相机标定方法
如果相机启动时出现如下警告:
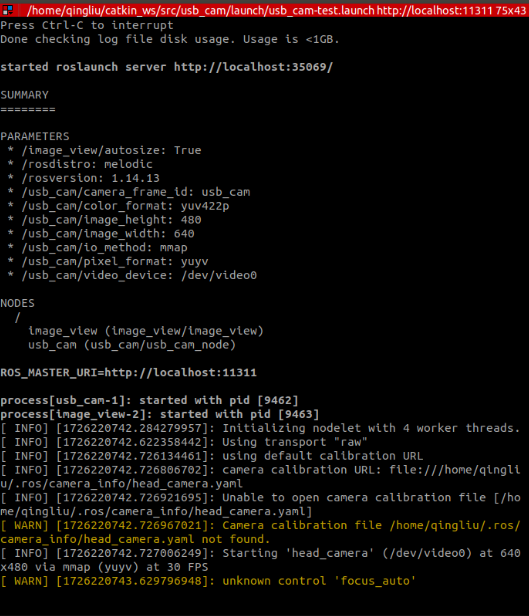
说明相机没有进行标定,所以出现警告。
参考以下链接进行相机标定:
【相机内参标定】------ 如何标定单目相机的内参(张正友标定法)
2.8 查看相机话题和数据
查看相机发布的话题。
bash
rostopic list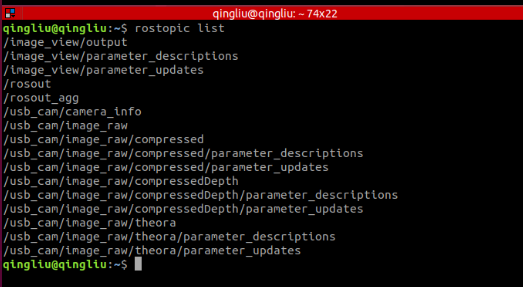
查看相机获取的数据。
bash
rostopic echo /camera_info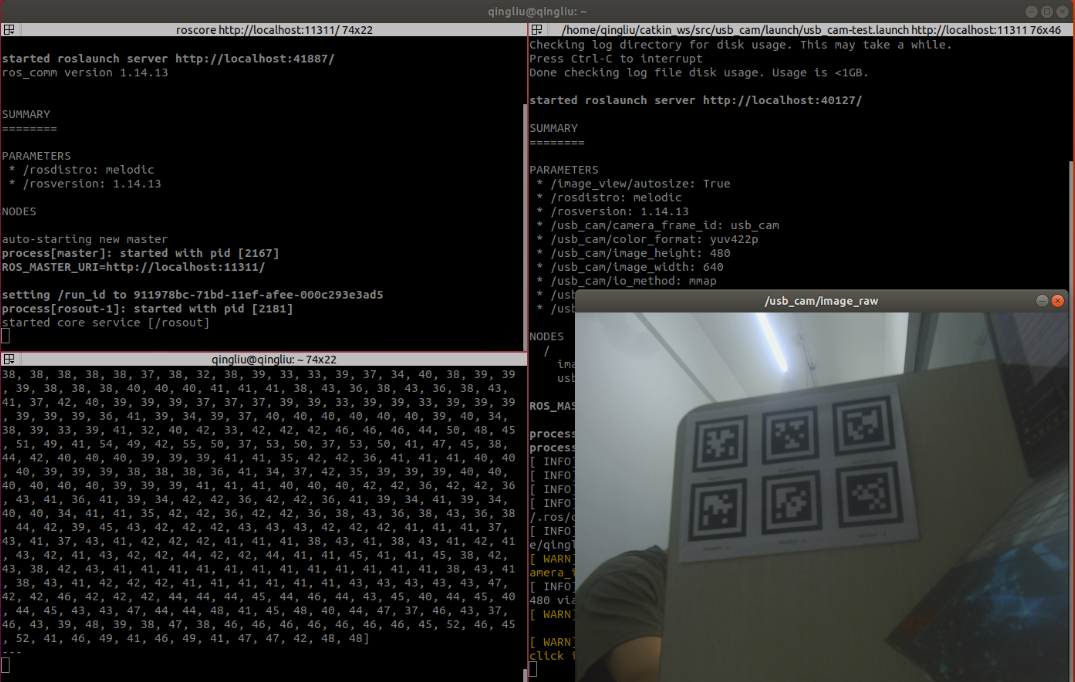
安装完成!
三、总结
在Ubuntu18.04上安装USB摄像头驱动usb_cam的方法主要有两种:源码安装和软件包安装。
-
源码安装方法
需要从GitHub下载usb_cam源码,切换到支持ROS1的master分支,并通过添加FFmpeg库路径到LD_LIBRARY_PATH来解决编译错误。
-
软件包安装方法
通过使用sudo apt-get命令安装ROS Melodic版本的usb_cam、camera-calibration和uvc-camera功能包,然后运行usb_cam-test.launch文件来启动摄像头节点。
安装完成后,可以通过rostopic list和rostopic echo命令查看摄像头发布的话题和获取的数据。
总的来说,这两种方法都能在Ubuntu18.04上成功安装和使用usb_cam驱动,但在选择安装方法时,应根据自己的需求和环境进行选择。
参考资料
3、【相机内参标定】------ 如何标定单目相机的内参(张正友标定法)
后记:
🌟 感谢您耐心阅读这篇关于 虚拟机安装USB摄像头ROS驱动 usb_cam 的技术博客。 📚
🎯 如果您觉得这篇博客对您有所帮助,请不要吝啬您的点赞和评论 📢
🌟您的支持是我继续创作的动力。同时,别忘了收藏本篇博客 ,以便日后随时查阅。🚀
🚗 让我们一起期待更多的技术分享,共同探索移动机器人 的无限可能!💡
🎭感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行 🚀