目录
增加环境变量
1.在home目录下按ctrl+h打开隐藏文件,打开.bashrc直接修改即可
2.输入gedit/vim ~/.bashrc修改即可
对于source ~/.bashrc这条指令只是适用于当前终端,如果修改完bashrc文件后可以关闭所有终端重新打开即可自动刷新环境变量,所以改完直接关更方便。
取消终端sudo密码
输入
sudo visudo划到下面 %sudo ALL=(ALL:ALL)
此图是修改好的,按照此图修改即可关闭密码 验证
该界面如何操作,直接跳到要输入位置,输入后按ctrl+o写入 ,回车确定,然后ctrl+x退出
关闭开机密码
打开设置,详细信息
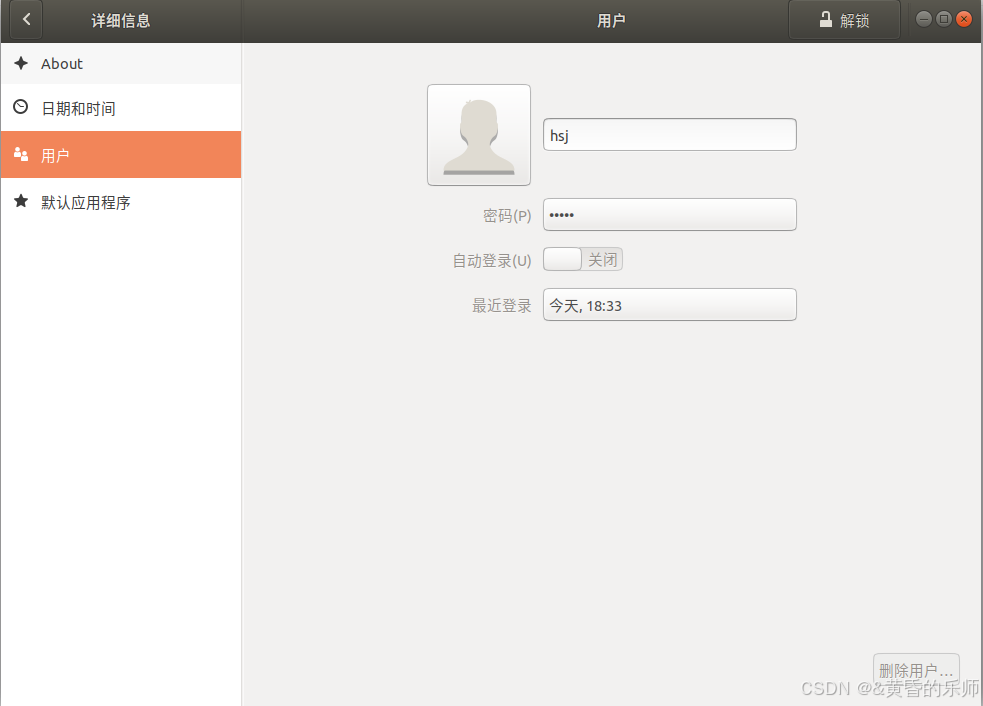
点击右上角解锁输入密码,然后打开自动登录(都则按钮是暗的)
编写sh文件
配合上一篇文章SSH
新建文档名称为 **.sh
第一行输入
#!/bin/bash之后一行一句指令
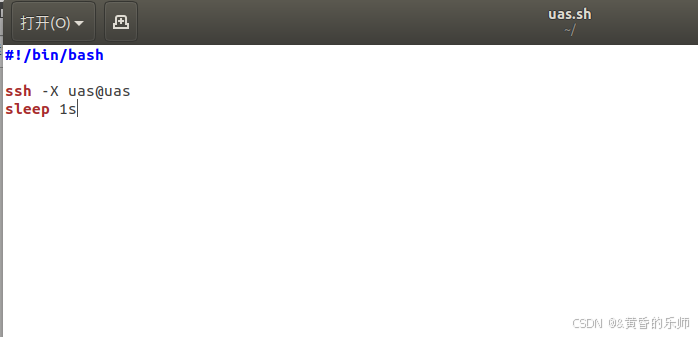
sleep 1s表示等待1s,这样写所有的指令都会在同一终端输入,像ros的话会冲突,所以这里提供另外一种写法
gnome-terminal -t "ssh" -x bash -c "ssh -X uas@uas;exec bash;"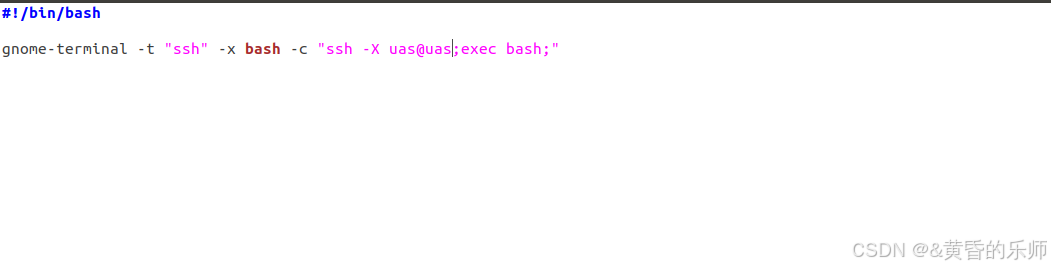
表示重新打开一个终端并输入""里的指令,第一个""里的是终端的名称, 可相同
第一次编写完成后需要赋予权限
sudo chmod 777 **.sh虚拟环境的启用与关闭
默认退出base环境
#修改默认配置
conda config --set auto_activate_base false # 默认不进入base环境
conda config --set auto_activate_base true # 默认进入base环境默认进入指定环境
在bashrc文件最后添加
conda activate env_name # env_name就是你的虚拟环境名称launch文件小技巧
对于ros繁琐的节点我们都会使用一两个launch文件来启动各个节点,或者用launch启动launch
如果多个节点同一launch启动也会占用一个终端,不太容易发现哪个掉了(报错)
所以在launch文件里添加参数
launch-prefix="gnome-terminal -x"会自动生成一个终端进行ros节点启用
方便调试
例如:
<!-- Start darknet and ros wrapper -->
<node pkg="darknet_ros" type="darknet_ros" name="darknet_ros" output="screen" launch-prefix="gnome-terminal -x">
<param name="weights_path" value="$(arg yolo_weights_path)" />
<param name="config_path" value="$(arg yolo_config_path)" />
<remap from="camera/rgb/image_raw" to="$(arg image)" />
</node>我修改的为darknet的launch文件,找到node句,然后再最后面添加参数即可。
开机自启
对于开机自启有很多种方法,这里说明一种本人用过的方法
打开启动应用程序首选项
或者输入
gnome-session-properties
如上图所示
点击添加,在指令行输入
gnome-terminal -x fish /home/**.sh意为开机自启一个终端并输入""内指令
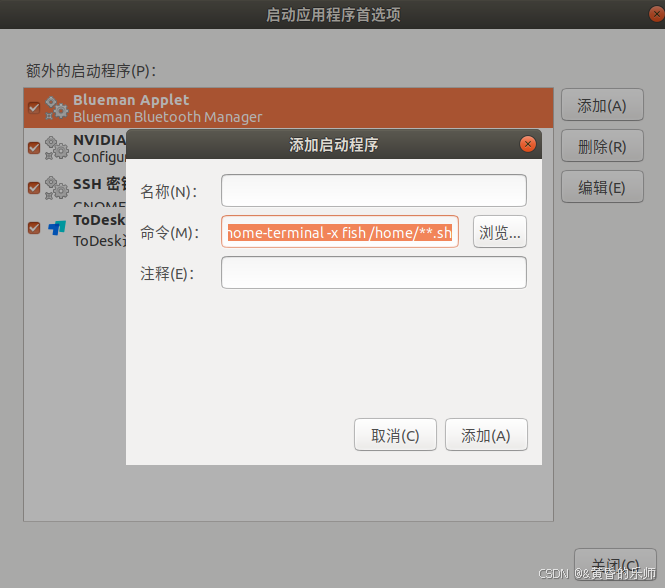
名称和注释随意编写。
上述为自身经历获得的经验,如有补充欢迎评论,感谢阅读
2024.9.22