一、单个无人机路径规划模型介绍
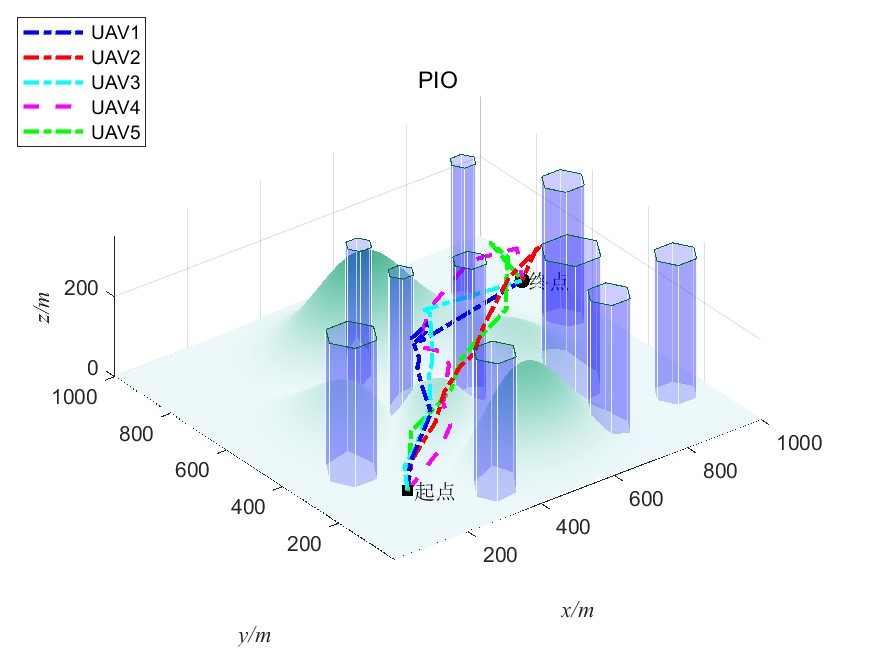
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、无人机集群模型介绍
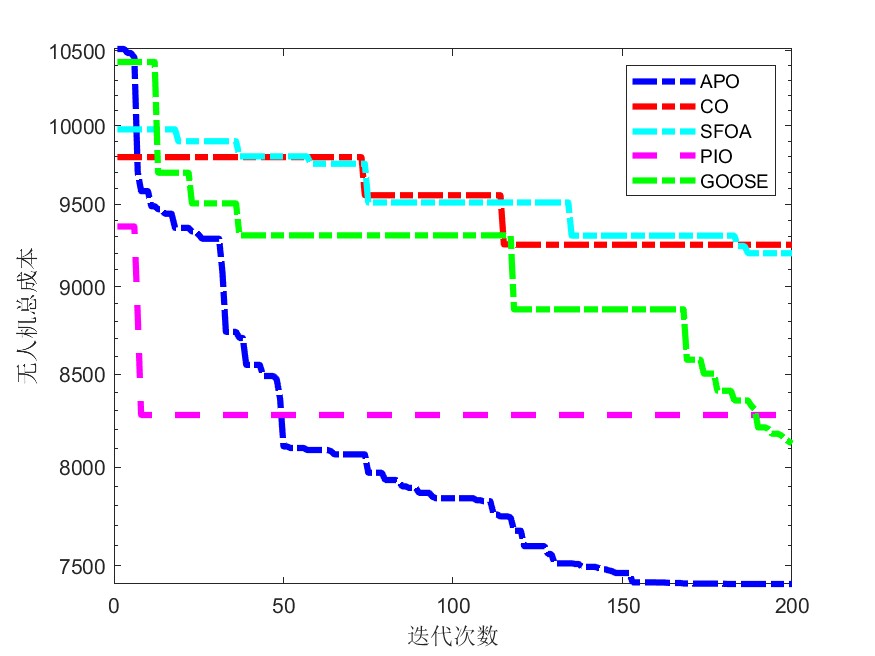
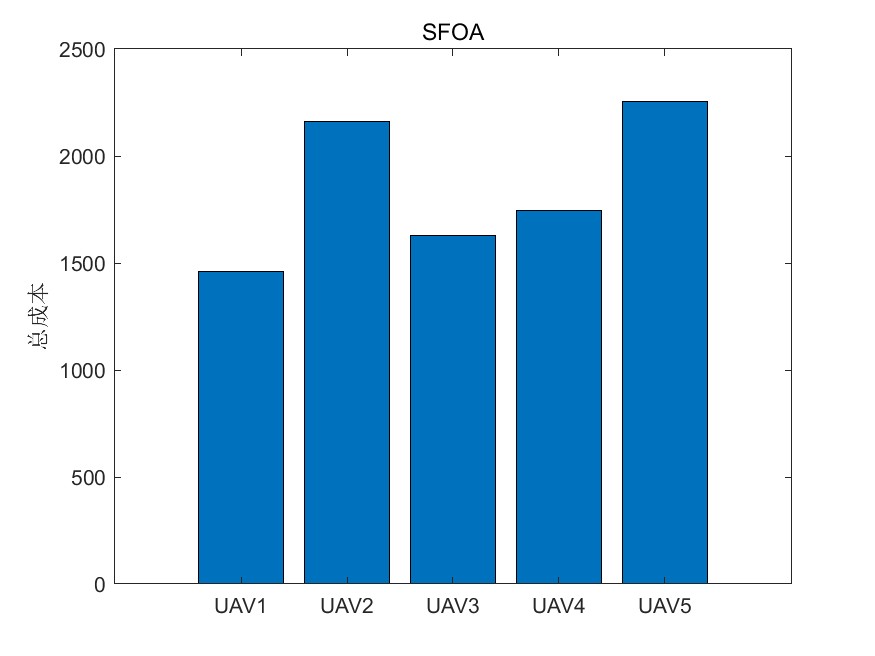
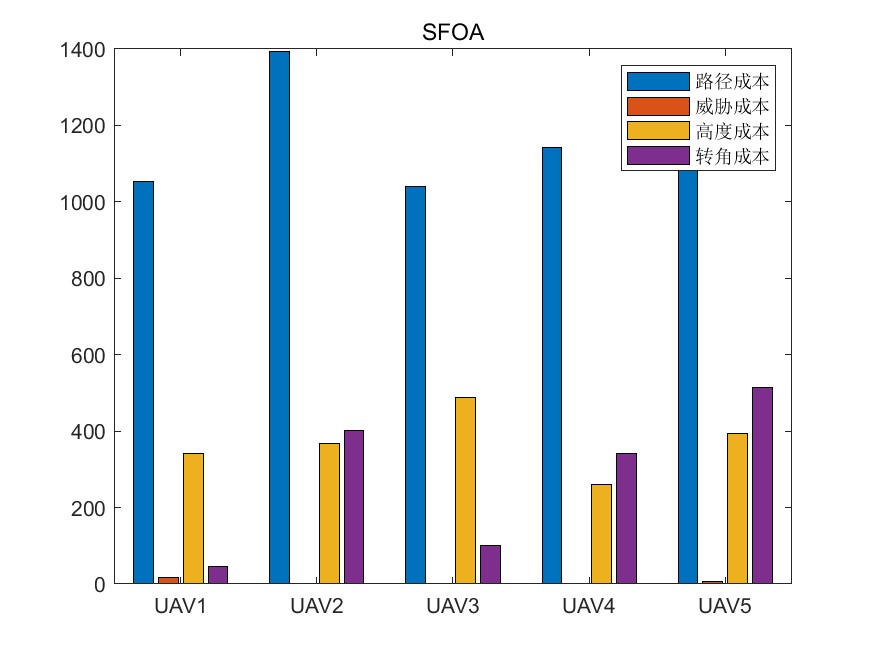
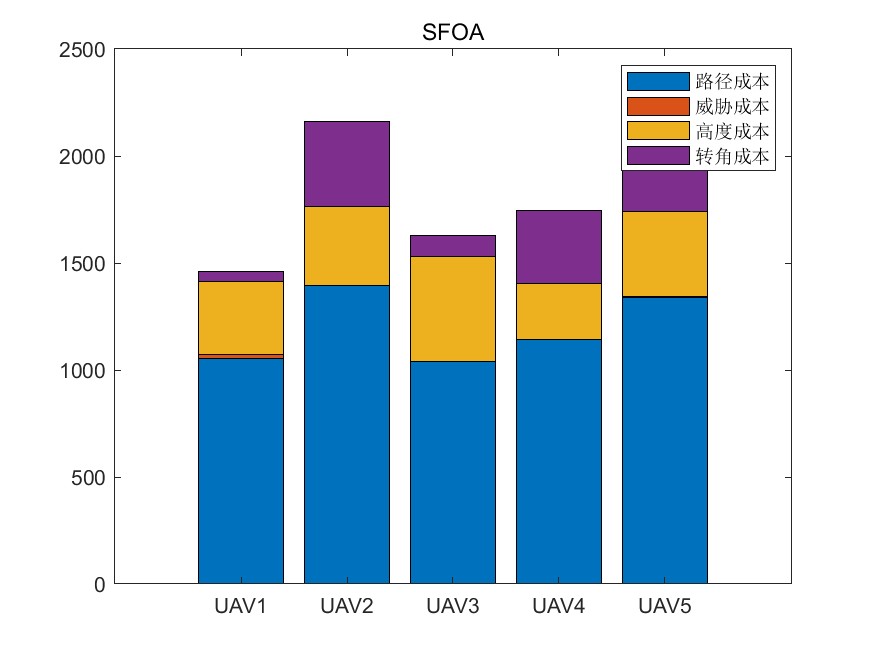
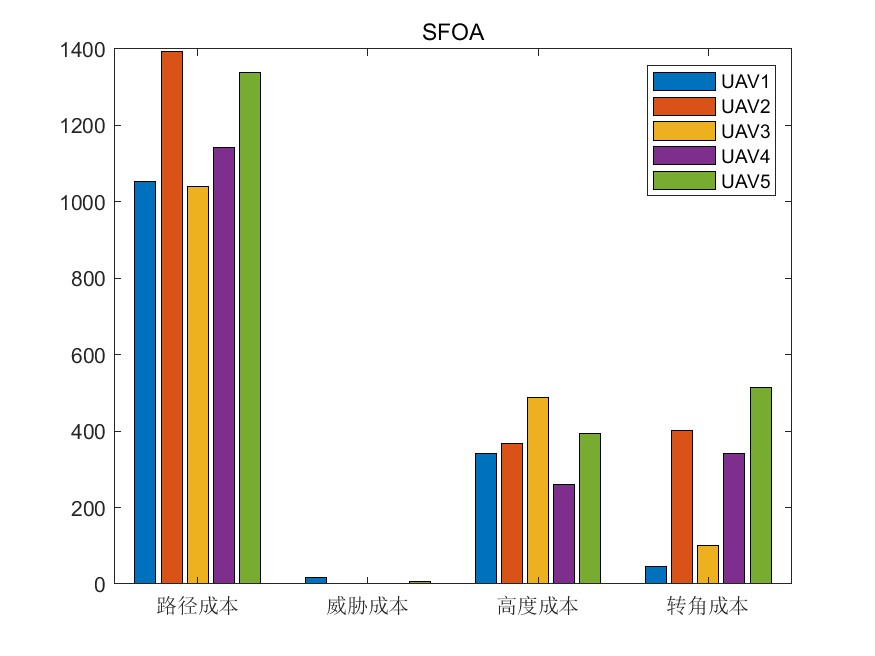
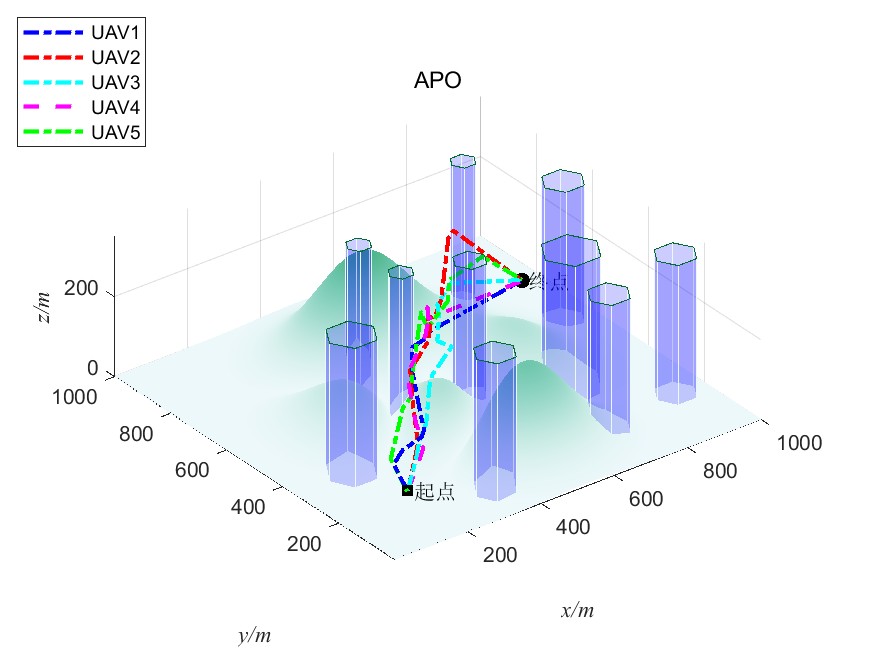
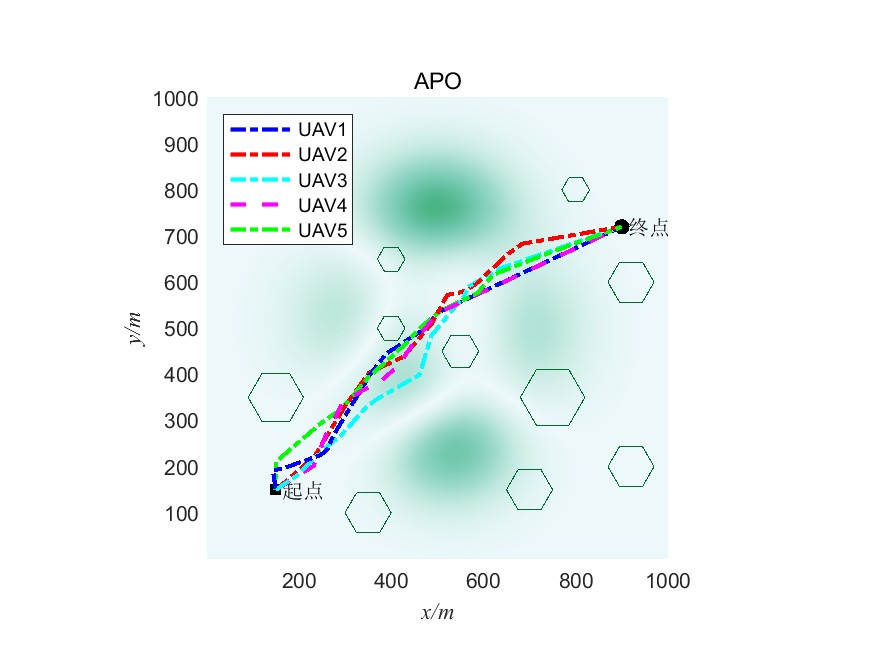
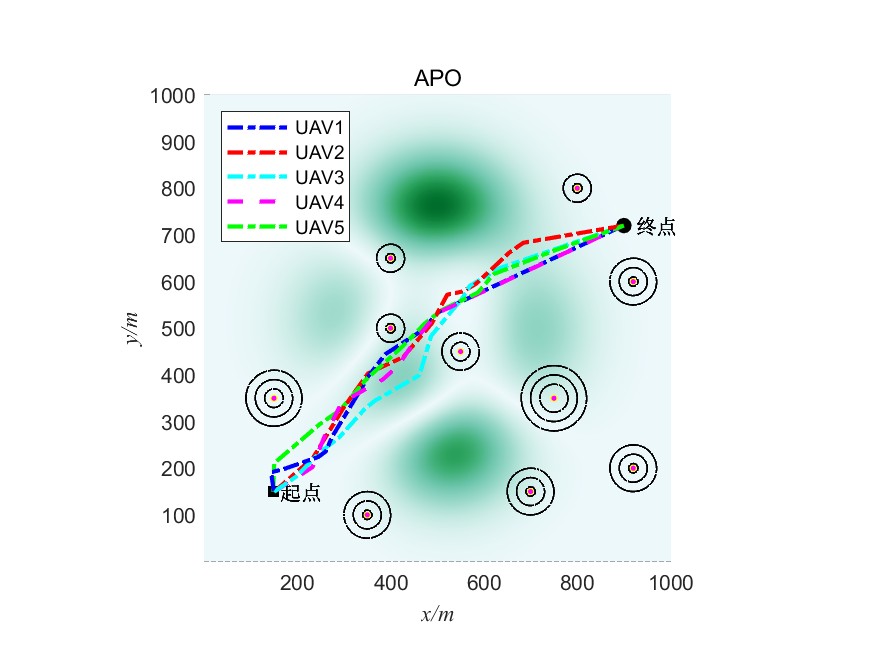
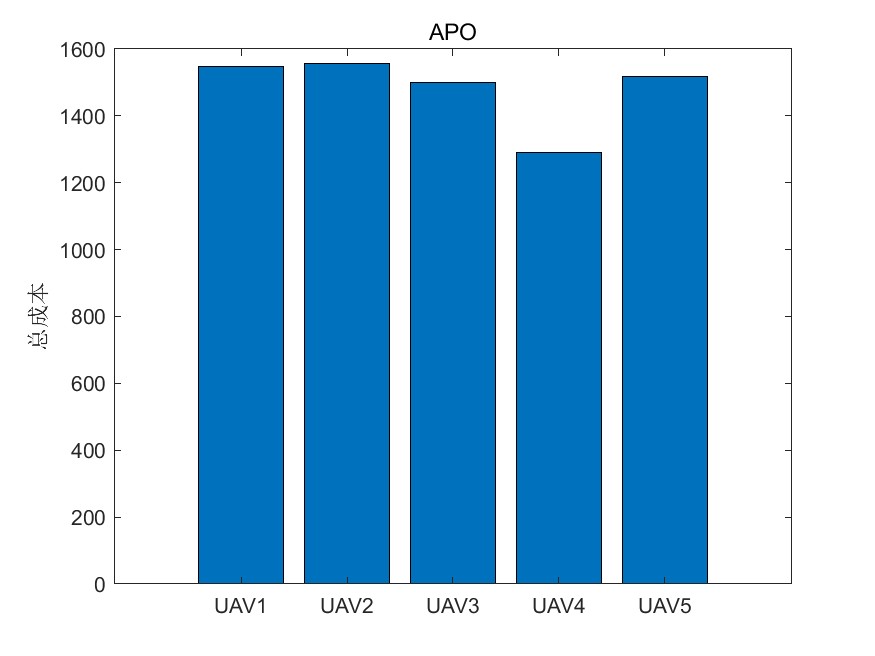
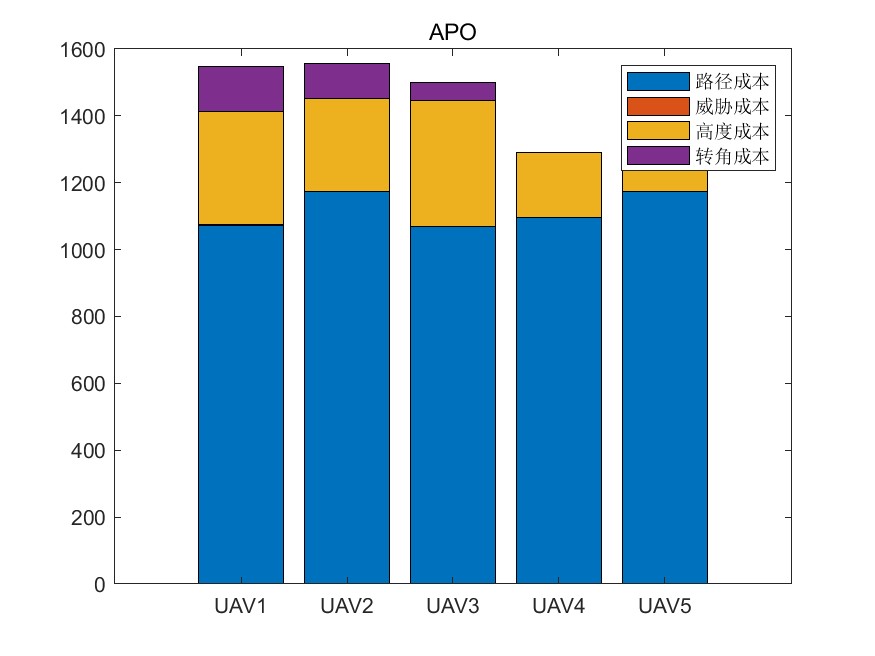
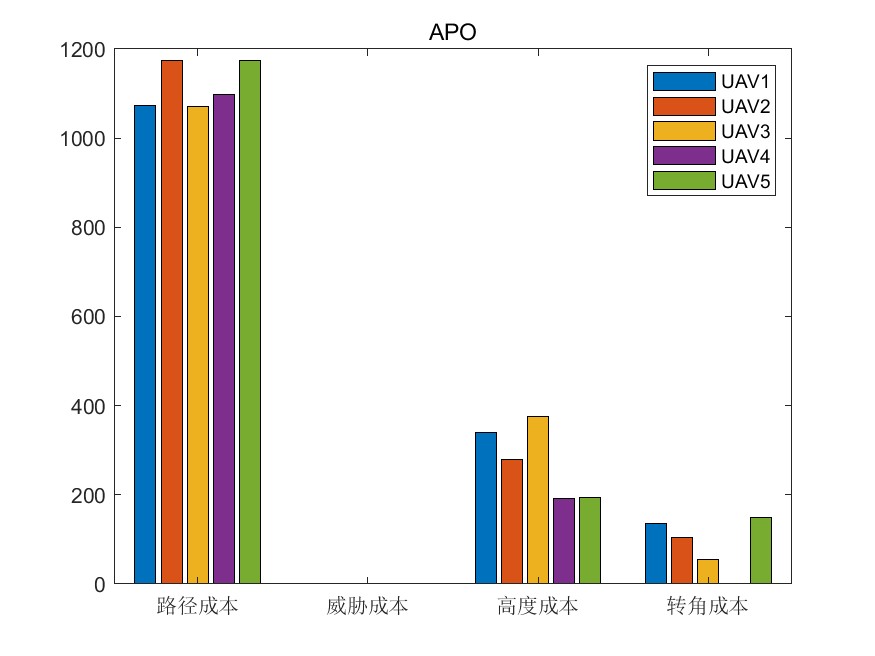
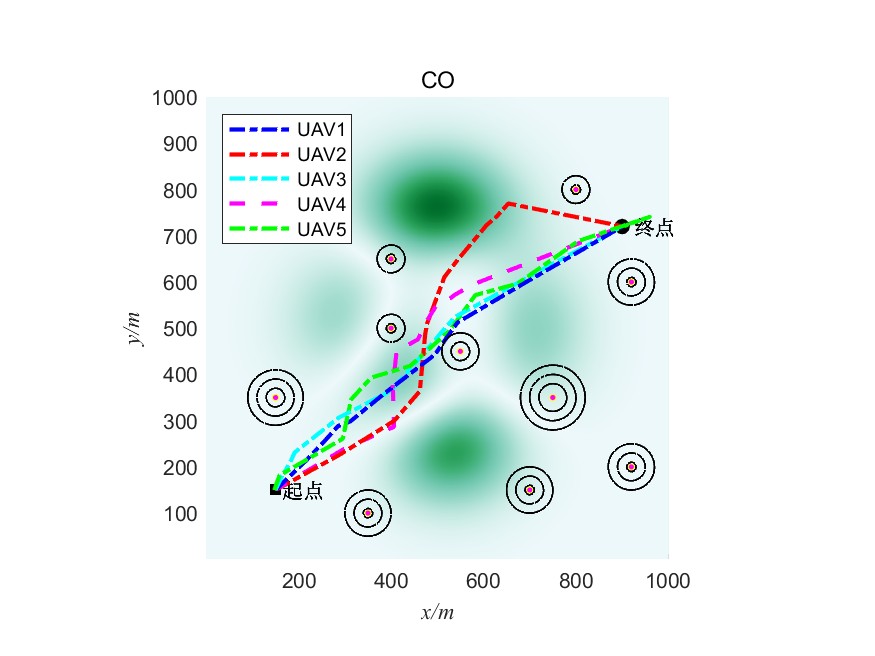
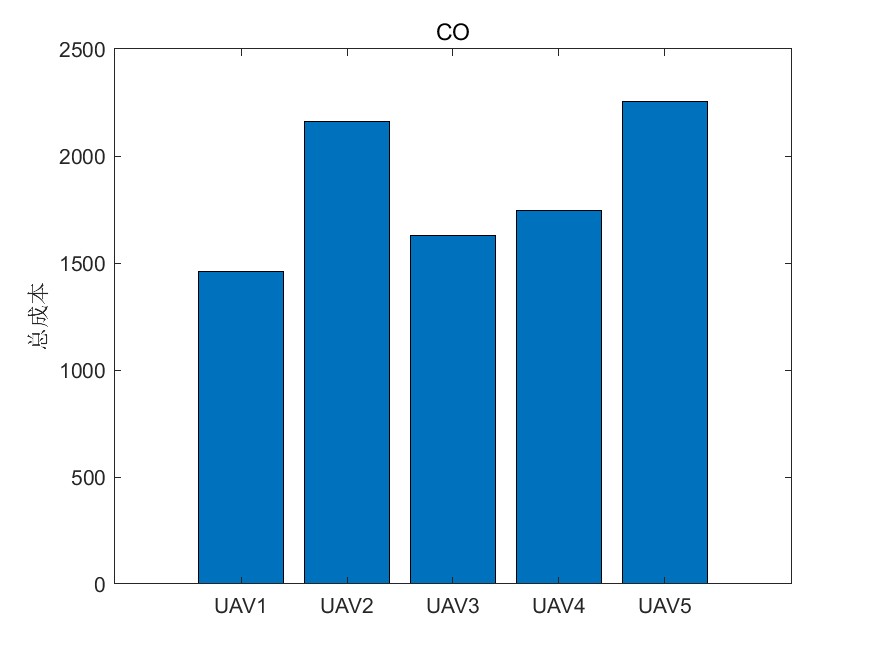
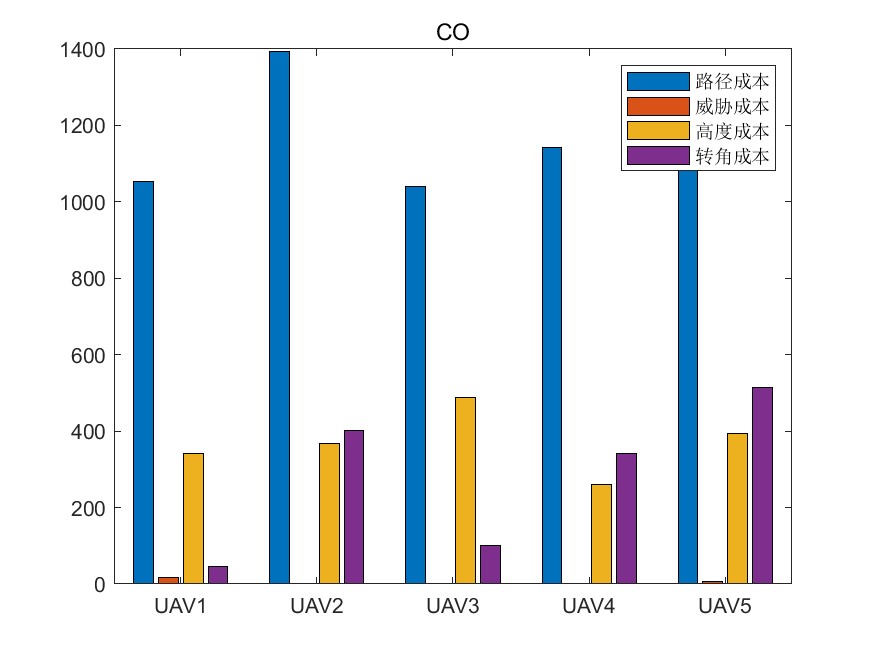
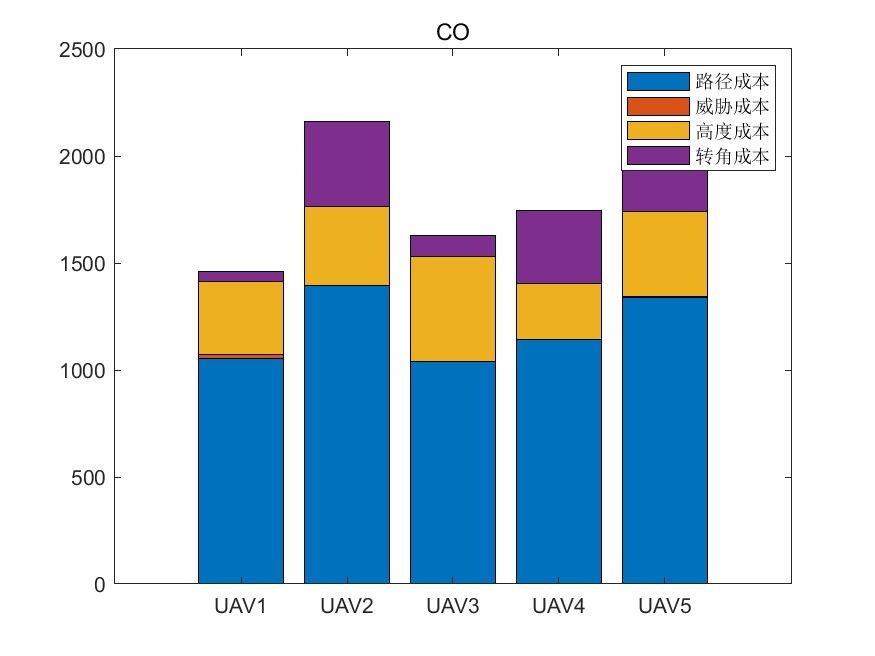
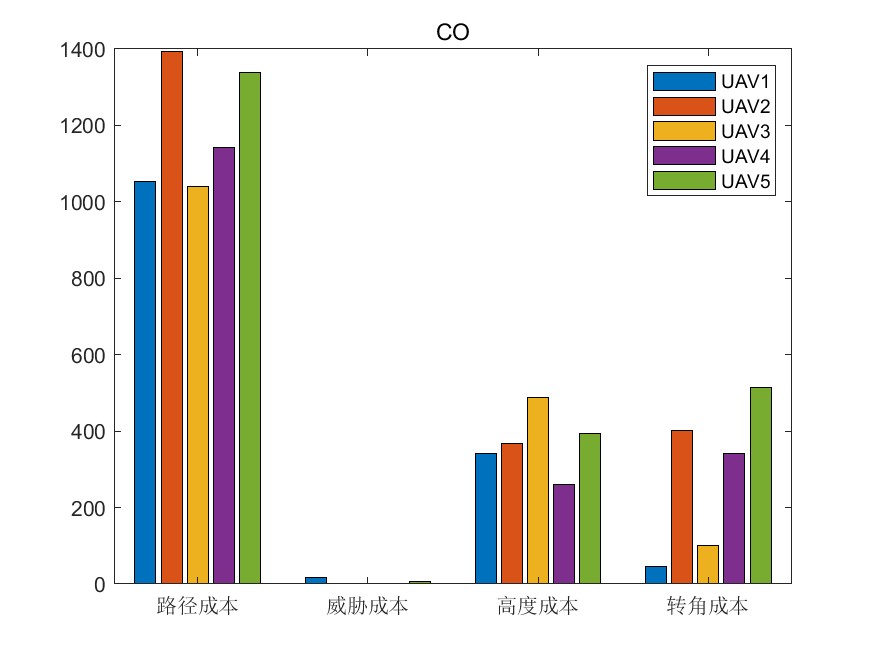
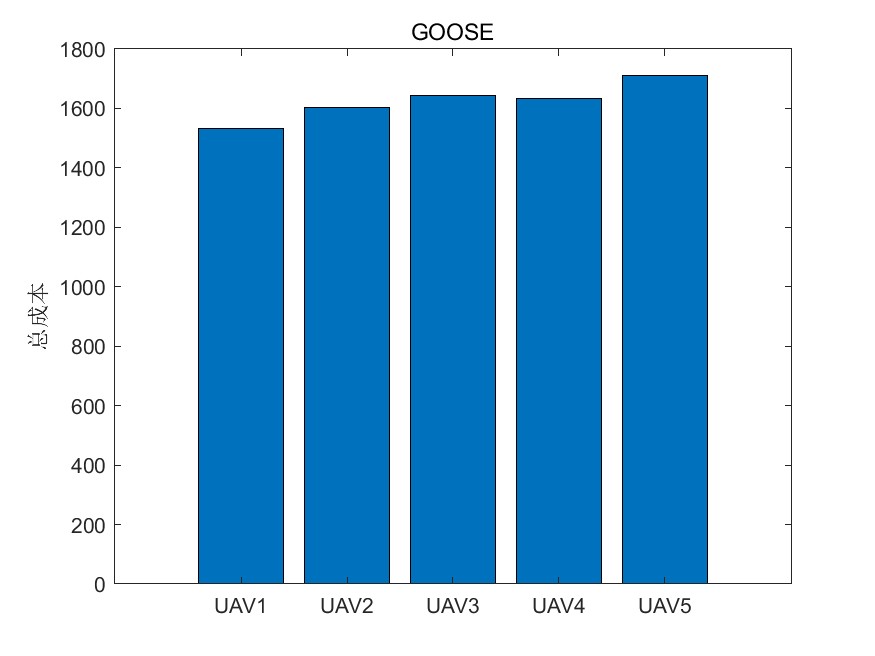
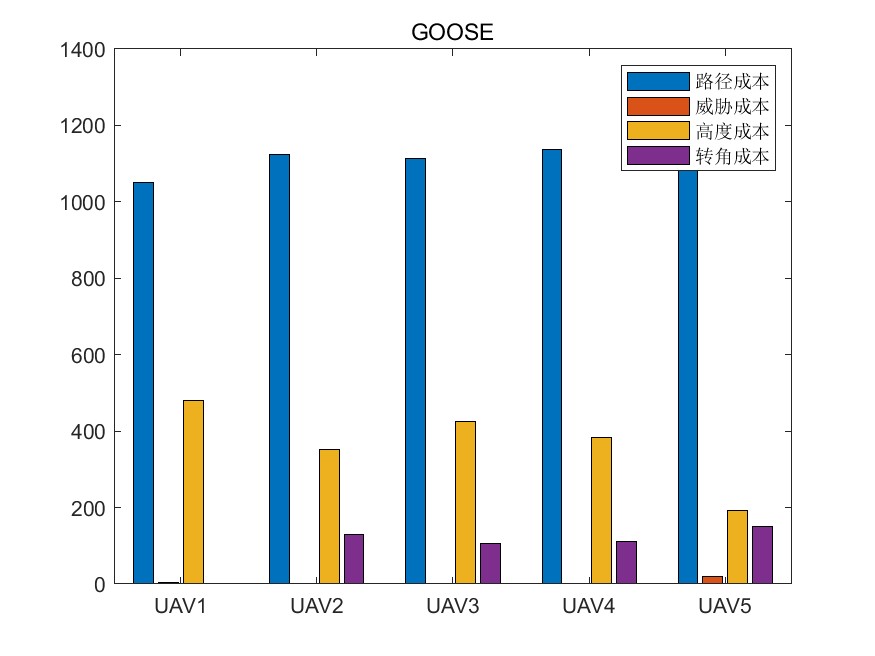
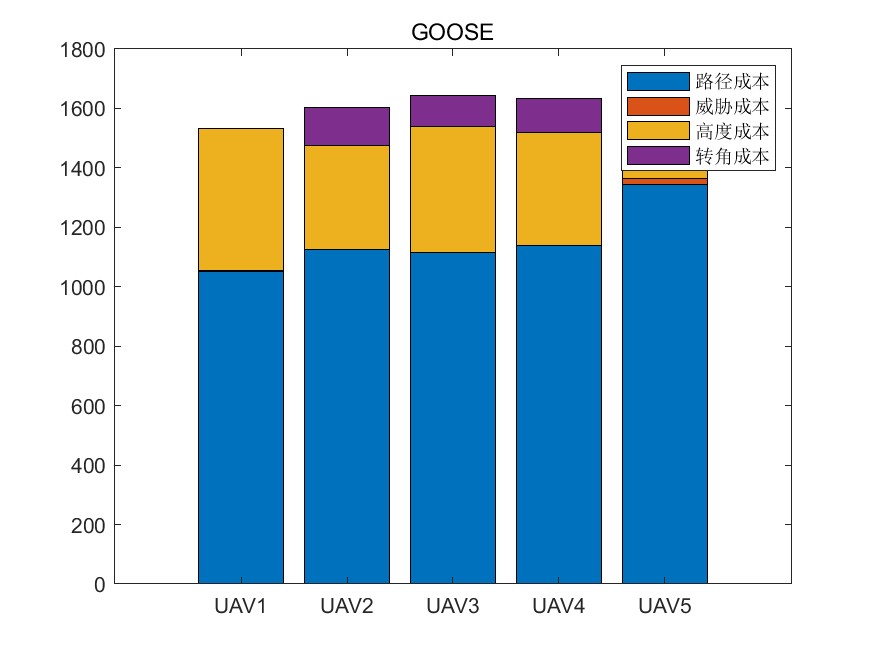
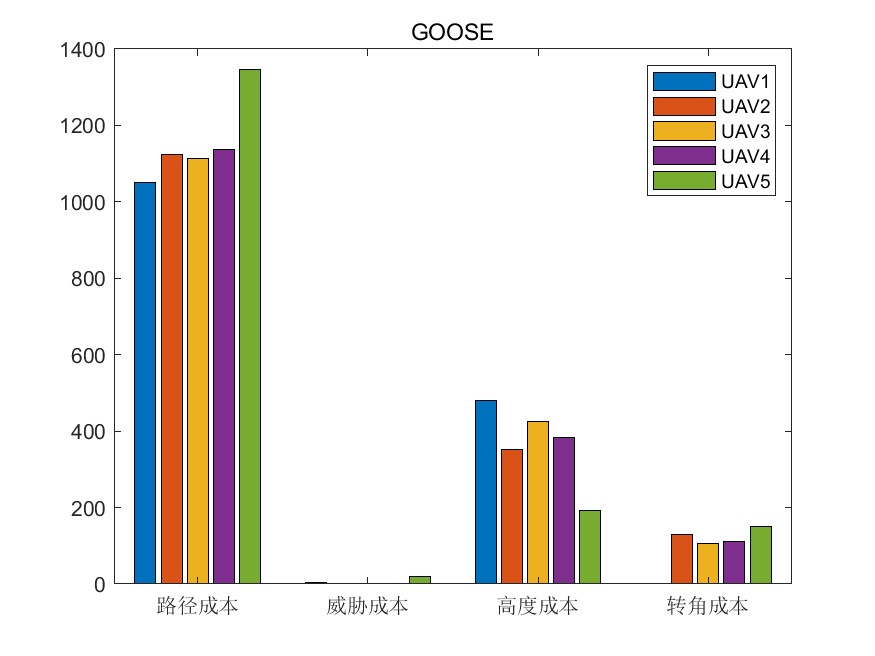
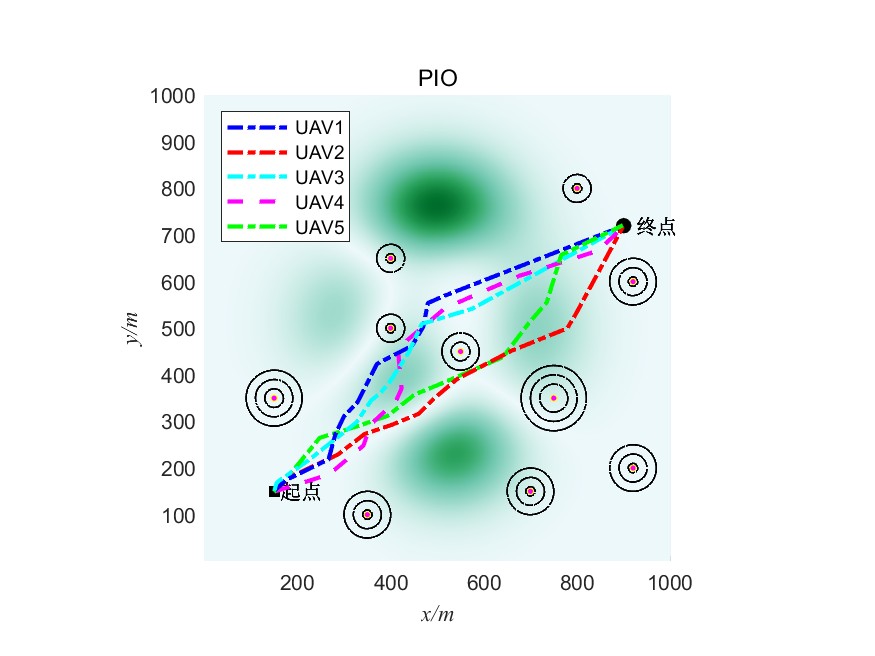
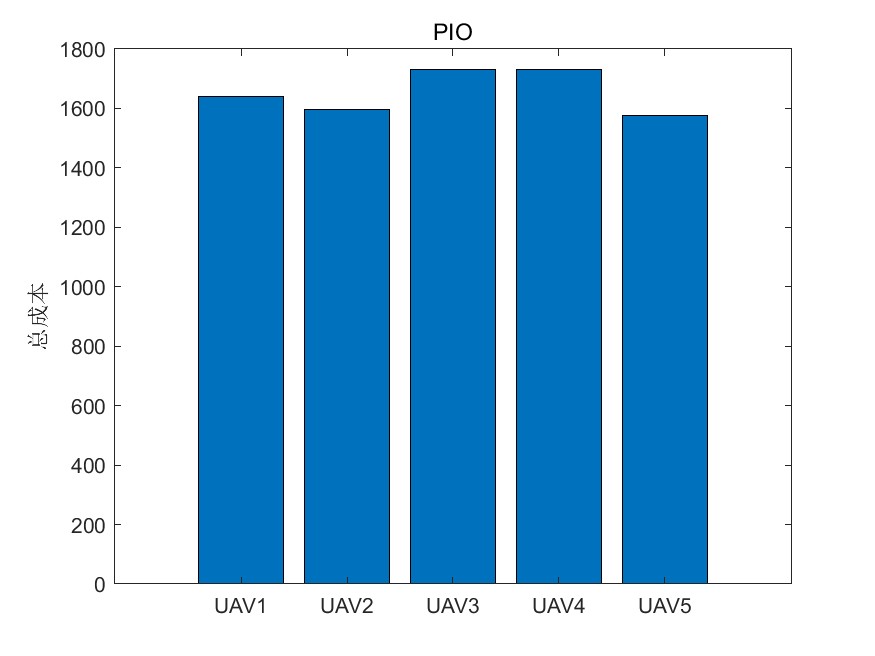
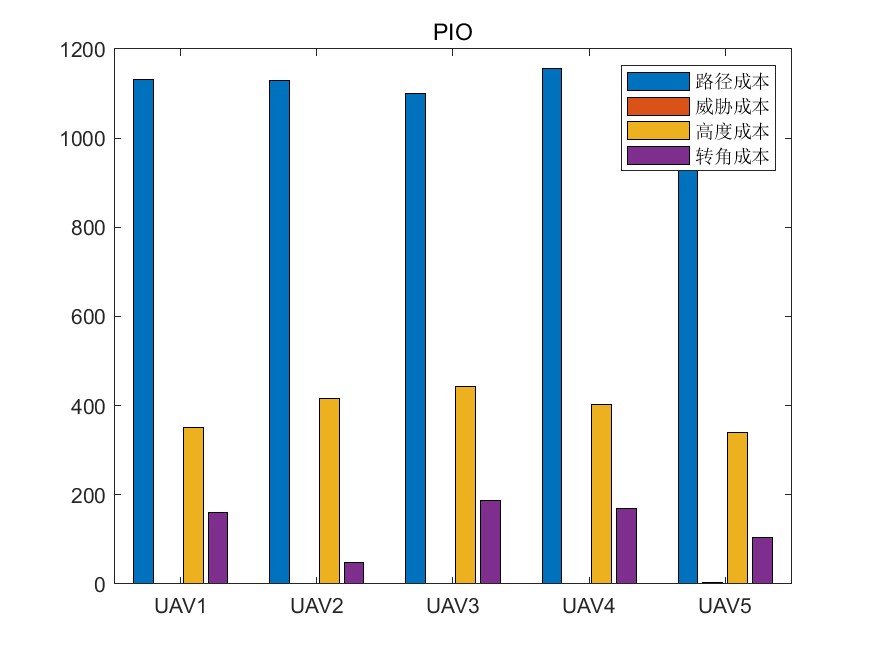
本文中以5个无人机构成无人机集群,采用优化算法同时规划五个无人机的路径,每个无人机的成本由路径成本、威胁成本、高度成本和转角成本四个部分构成。无人机集群的总成本为5个无人机成本之和。
三、5种算法求解无人机集群路径规划
3.15种算法介绍
3.1、 人工原生动物优化器APO
**人工原生动物优化器(APO)**是一种新型的元启发式算法(智能优化算法),灵感来源于模拟原生动物的觅食、休眠和繁殖行为的生存机制,APO与32种最先进的算法进行了比较,实验证明,该算法对优化问题具有较强的竞争性。
1Wang X, Snášel V, Mirjalili S, et al. Artificial Protozoa Optimizer (APO): A novel bio-inspired metaheuristic algorithm for engineering optimizationJ. Knowledge-Based Systems, 2024: 111737.
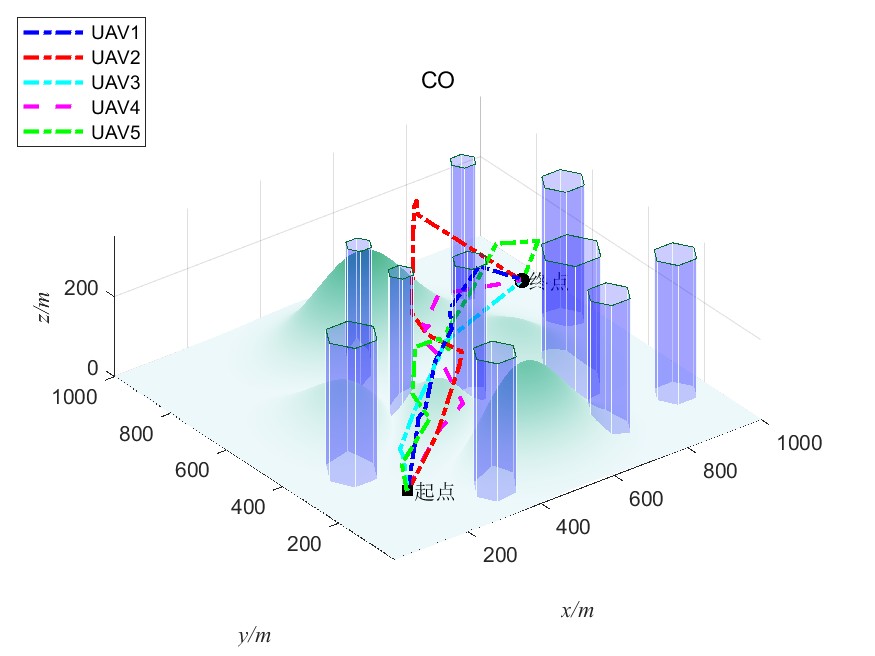
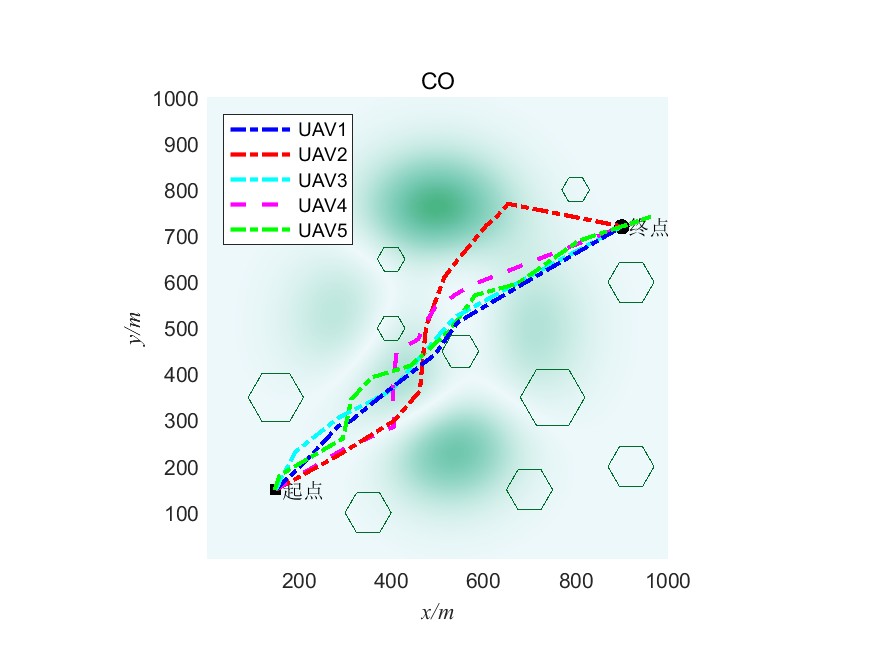
3.2、猎豹优化算法CO
-
原理
- 猎豹优化算法基于猎豹在自然界中的狩猎行为。猎豹以其高速奔跑、灵活转向和精准追捕能力而闻名。算法模仿猎豹的这些特性,通过快速的搜索和精确的定位来寻找最优解。
- 通常包括速度更新和位置更新两个主要步骤,以模拟猎豹的运动。
-
特点
- 具有快速的收敛速度,能够在较短的时间内找到较好的解。
- 对于高维度的优化问题,也能表现出一定的有效性。
- 能够有效地避免局部最优解,提高算法的搜索精度。
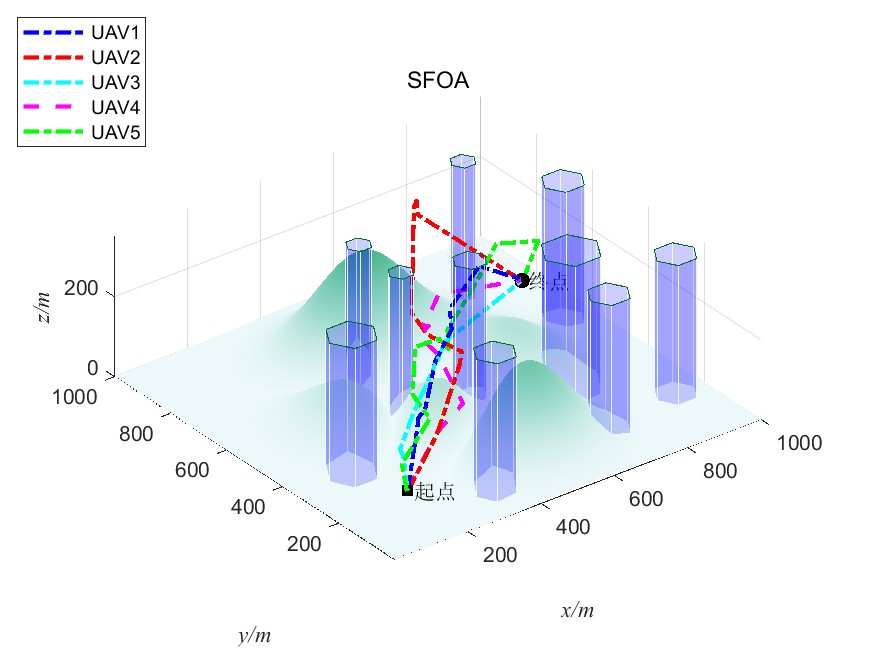
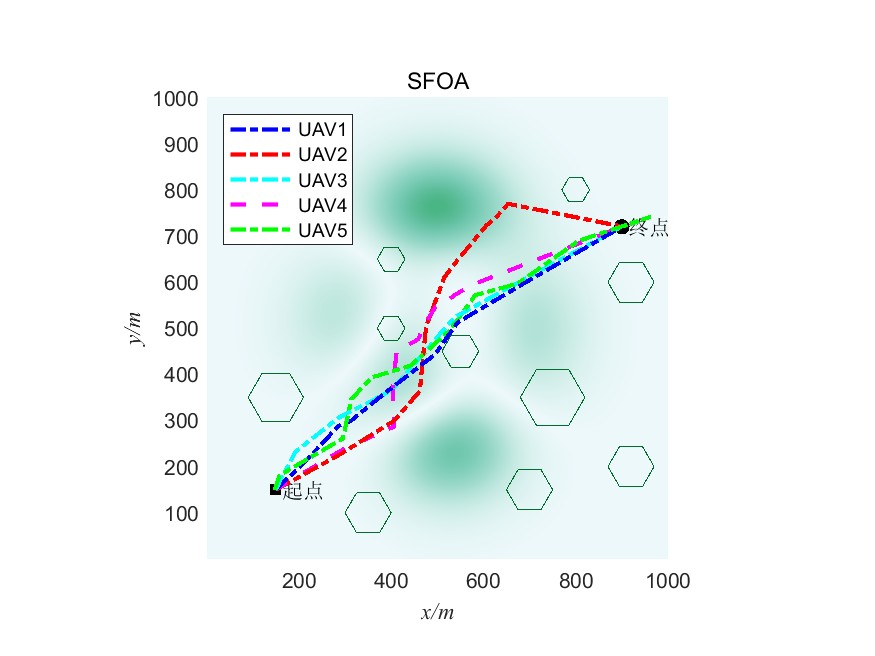
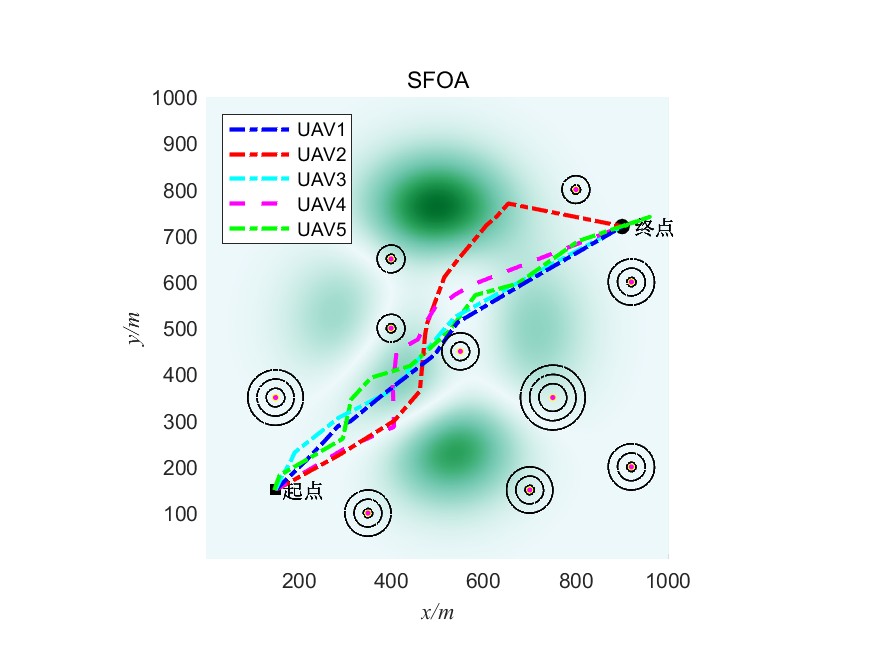
3.3、海星优化算法SFOA
海星优化算法(Starfish Optimization Algorithm ,SFOA)是2024年提出的一种元启发式算法,该算法模拟了海星的行为,包括探索、捕食和再生。
参考文献:Changting Zhong, Gang Li, Zeng Meng, Haijiang Li, Ali Riza Yildiz, Seyedali Mirjalili. Starfish Optimization Algorithm (SFOA): A bio-inspired metaheuristic algorithm for global optimization compared with 100 optimizers. Neural Computing and Applications, 2024,
3.4、鸽群优化算法PIO
-
原理
- 鸽群优化算法源于鸽子在归巢过程中的导航行为。鸽子能够利用地球磁场、地标等信息准确地找到回家的路。算法模拟鸽子的归巢行为,通过地图和指南针算子、地标算子等步骤来进行优化搜索。
-
特点
- 具有较好的全局搜索能力和收敛速度。
- 对于复杂的多模态优化问题,能够有效地找到多个最优解。
- 算法的稳定性较高,不容易受到初始值的影响。
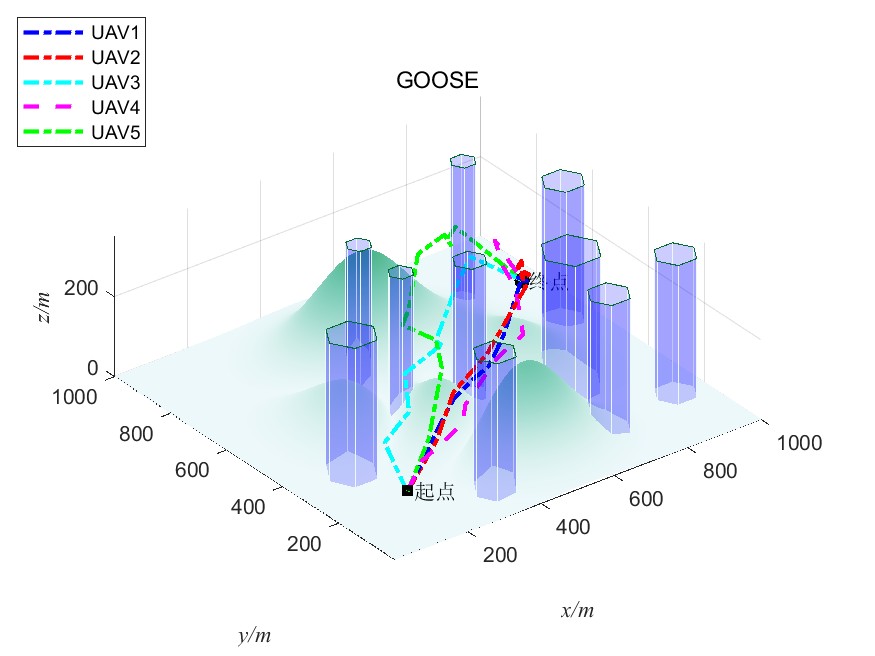
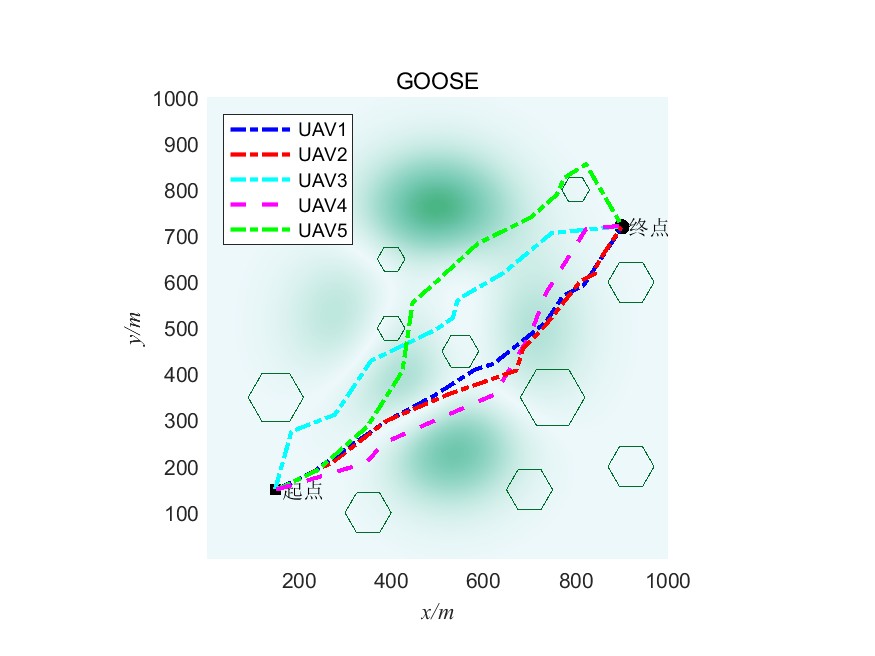
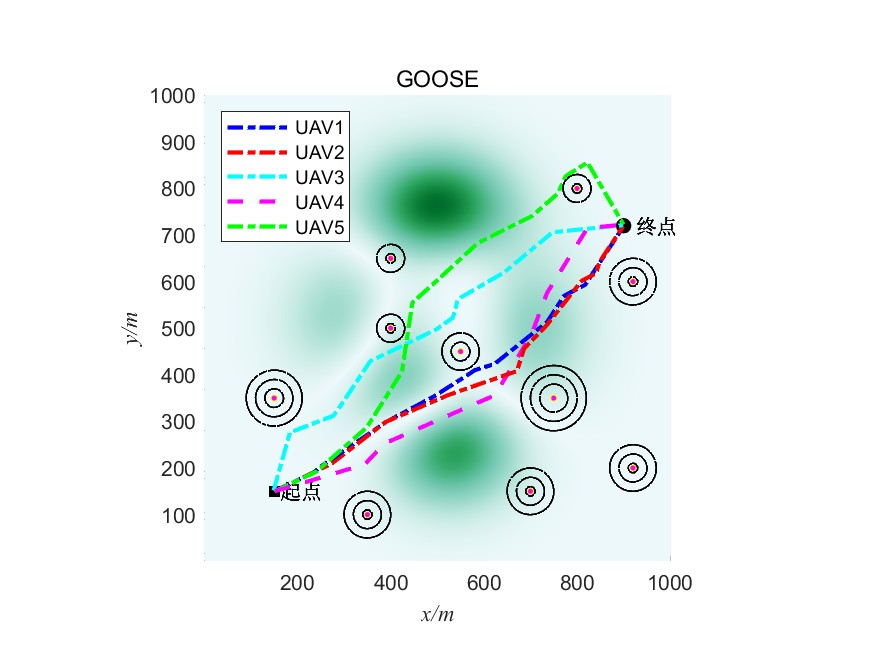
3.5、鹅群优化算法GOOSE
鹅群优化算法(GOOSE)是一种受鹅群行为启发而提出的新型智能优化算法。
鹅群在自然界中的行为具有一定的规律和特点,GOOSE 算法正是模拟了这些行为来进行优化搜索。
- 群体结构:算法将优化问题的解空间类比为鹅群的生存环境,解空间中的每个解被视为一只鹅。鹅群通常分为多个子群,每个子群有一个领导者。
- 领导者行为:领导者具有较强的引导能力,它会根据全局最优解和自身经验来调整飞行方向和速度,带领子群向更优的区域移动。
- 跟随者行为:跟随者会跟随领导者飞行,并在一定条件下进行局部搜索,以寻找更好的解。跟随者也会根据自身经验和邻居鹅的信息来调整自己的位置。
- 信息交流:鹅群中的个体之间会通过信息交流来共享搜索经验。这种信息交流可以帮助鹅群更快地找到最优解。
3.6部分代码
close all
clear
clc
dbstop if all error
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=50;%种群大小(可以自己修改)
maxgen=100;%最大迭代次数(可以自己修改)
for i=1:length(algorithName)
Algorithm=str2func(algorithName{i});
[fMin,bestX,ConvergenceCurve] = Algorithm(pop, maxgen,Xmin,Xmax,dim,fobj);
result(i).fMin=fMin;
result(i).bestX=bestX;
result(i).ConvergenceCurve=ConvergenceCurve;
result(i).BestPosition=BestPosition;
result(i).BestFit=BestFit;
result(i).UAVfit=UAVfit;
end
save result result3.7部分结果




四、完整MATLAB代码
见下方名片