如果你的现场总是发生急停,很可能是++PLC++和设置间网络中断,本文用一个真实案例告诉你问题背后的原因和解决方法!
这是一台生产汽车配件的机器,使用1500F的控制器连接机器人控制器,现场装置总会莫名其妙的发生急停故障。
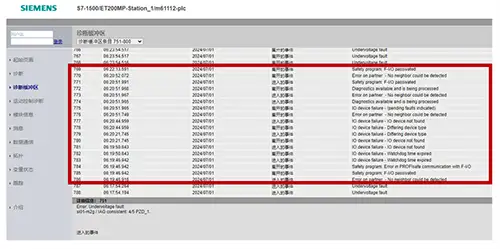
首先,仔细查看现场在那个时间段的故障信息,通过PLC的Web页面查看诊断缓冲区,可见发生故障时PLC的信息,其中出现的第一个重要的信息是"Error on partner-No neighbor could be detected",这表明机器人控制器与连接的交换机断开了连接,同时也证明了博途使用了网络拓扑组态,这种组态给诊断带来了很大的便利性。
试想一下,如果没有组态网络拓扑而不出现这样的诊断信息,只有诸如"Watchdog time expired"这样的信息,会给诊断带来很大的难度,因为导致看门狗超时的故障信息的真实原因有很多。
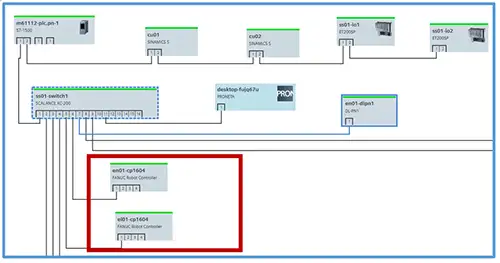
为了确认现场的故障信息,我们使用Proneta查看了网络拓扑,其中采用的星型网络的交换机使用了管理型的交换机SCALANCE XC216,经过和现场工程师的确认,经常是网络中的机器人控制器发生急停(下图红框内的设备需要虚化,不能让观众看到上面的字),实际上从诊断信息可以看见实际是通信故障。
借助管理型的交换机SCALANCE XC216的Log table日志信息,我们看到发生故障时机器人控制器所连接的端口出现了Link down和Link up的信息。这样就排除了交换机的问题,那么问题就显而易见了,这表明机器人控制器的网卡出现了问题,会出现偶尔物理连接断开的情况。那么我们就可以建议用户与机器人生产商取得联系,看是否可以更换网卡或对应的设备。
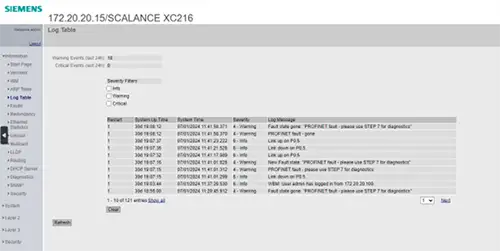
管理型交换机的日志表中可以清晰的标识网络端口出现的问题,从而进一步验证了PLC中的故障信息"Error on partner-No neighbor could be detected",机器人设备与PLC物理连接断开。这里需要特别说下,以前给OEM用户建议使用管理型交换机,从这个案例更好验证了使用管理型交换机的重要性,借助它可以高效的解决现场的问题。