一.Ubuntu22.04系统虚拟机安装
1.下载镜像并安装 Index of /ubuntu-releases/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
2.安装选英文版,安装类型选清除磁盘。


3.遇到无法复制windows内容到虚拟机里。需安装VMware tools。VMware tools安装不了,提示连接到更新服务器时发生证书错误。
科学上网,输入以下命令:
sudo apt autoremove open-vm-tools
sudo apt update
sudo apt install open-vm-tools
sudo apt install open-vm-tools-desktop二.ROS2 humble系统安装
1.系统搭配说明:Ubuntu 22.04搭配ROS 2 Humble。

2.安装ROS2 Humble,需要科学上网。
官网提示https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.htm
3.添加ROS2 apt源
sudo apt install software-properties-common
sudo add-apt-repository universe4.add ROS 2 GPG key
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg5.添加仓库源列表sources list.
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
#安装ROS2核心组件、RViz可视化工具、演示和教程等资源,但不包含开发工具。
sudo apt install ros-humble-desktop
#安装ROS开发、构建、测试和调试ROS应用的工具
sudo apt install ros-dev-tools6.设置环境变量
source /opt/ros/humble/setup.bash三.安装开发工具
1.vscode
下载地址Visual Studio Code - Code Editing. Redefined
bash
sudo dpkg -i code_1.9*- 安装terminator
bash
sudo apt install terminator3.Rviz
#运行命令
ros2 run rviz2 rviz2四.Gazebo仿真平台
ROS2支持的仿真平台有:Gazebo、Ignition、WeBots、Unity。
- Gazebo官网:Cyberbotics: Robotics simulation with Webots,Gazebo是ROS中常用的机器人仿真平台。
- Ignition官网:Gazebo 官方文档:https://ignitionrobotics.org/docs继承Gazebo的下一代仿真平台,基于开发库和云服务等工具箱,提供新的简化的仿真方式。
- WeBots官网:Cyberbotics: Robotics simulation with Webots
- Unity官网:hUnity Real-Time Development Platform | 3D, 2D, VR & AR Engine UnityForROS2:https://github.com/RobotecAI/ros2-for-unity
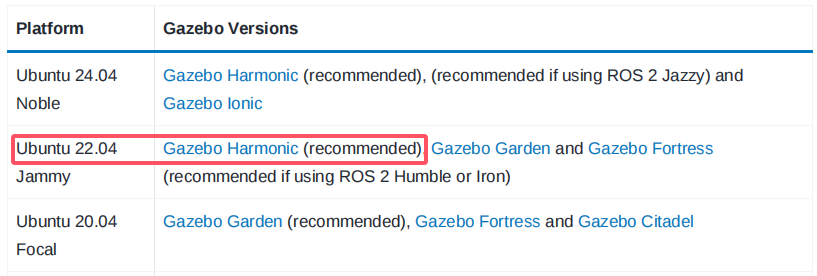
1.安装Gazebo Harmonic
# 安装Gazebo的ROS 2集成包
sudo apt install ros-humble-gazebo-ros-pkgs
# 下载Gazebo的地图模型
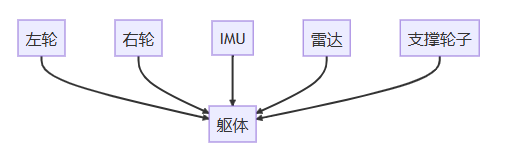
git clone https://gazebosim.org/docs/latest/getstarted/2.制作机器人模型
3.验证gitee LiJianghao/ mbot_gazebo_ros2代码,安装环境依赖
sudo apt install ros-humble-gazebo* #安装gazebo依赖库和插件
sudo apt install ros-humble-velodyne* #安装Velodyne(威力登)激光雷达依赖和软件包发现这套代码运行起来,虚拟机变得很卡!!!!应该是模型配置的有点复杂!!
五.URDF统一机器人建模语言
1.建立机器人模型

2.URDF可视化步骤如下:
- 建立机器人描述功能包
- 建立
urdf文件夹编写urdf文件 - 建立
launch文件夹,编写launch文件 - 修改
setup.py配置,编译测试
3.机器人建模过程:参考鱼香ros
-
创建机器人包,具体见以下网页
https://fishros.com/d2lros2/#/humble/chapt8/get_started/2.RVIZ2可视化URDF模型
ros2 pkg create fishbot_description --build-type ament_python -
查看节点和他们的通信关系
sudo snap install tree #安装新版的tree
rqt_graph #显示节点和及它们之间的通信关系