线性表:有个n个元素的集合,逻辑上成线性结构。(顺序表、链表、栈、队列、串)。
栈
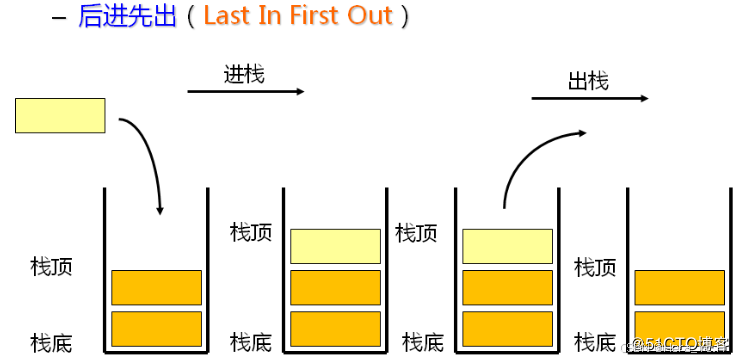
栈 :一种特殊的线性表,其只允许在固定的一端进行插入和删除元素操作。
进行数据插入和删除操作的一端称为栈顶,另一端称为栈底。
栈中的数据元素遵守后进先出LIFO(Last In First Out)的原则。
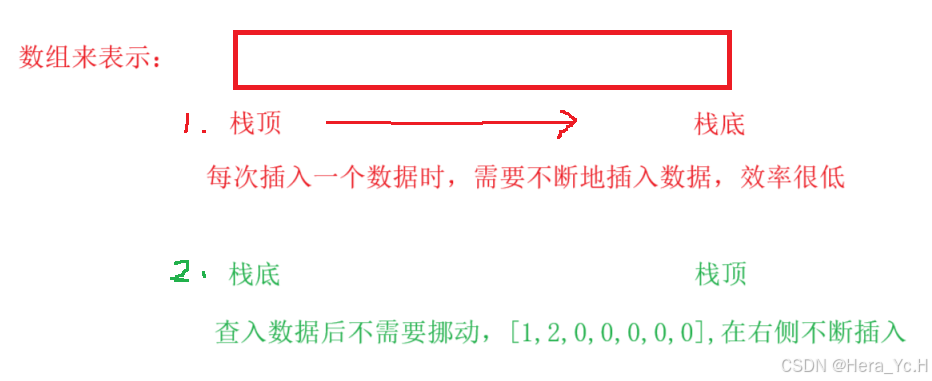
数组来实现:
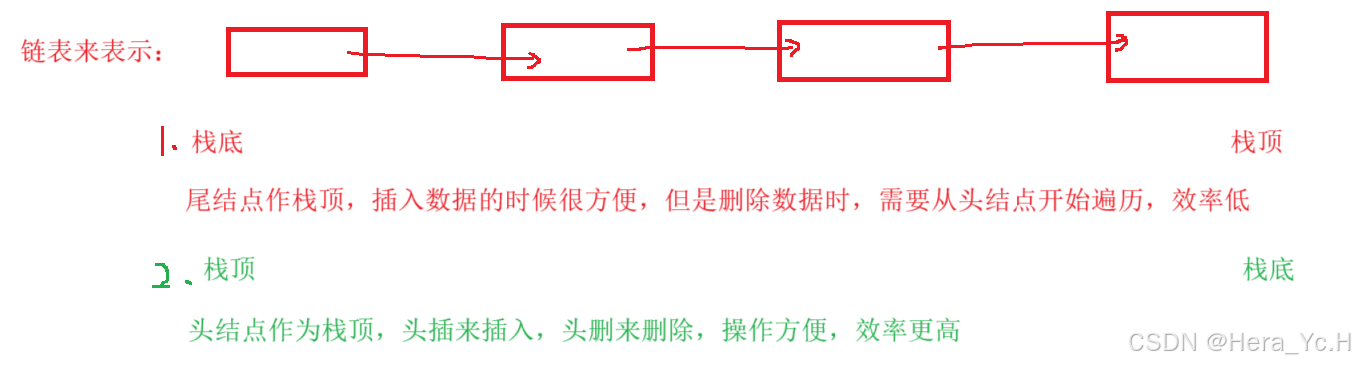
链表来实现:
- 如果是双向链表,那么哪边是栈顶,哪边是栈底都无所谓。
- 如果是单链表:
实现栈 :数组更加简单(对于当代的计算机,内存开辟带来的时间开销可以忽略不计)。
头文件
cpp
#pragma once
#include <stdio.h>
#include <stdlib.h>
#include <assert.h>
typedef int STDataType;
#define N 4
/*
静态
struct Stack
{
int* _a[N};
int _size;//
};
*/
typedef struct Stack
{
STDataType* _a;
int _top; //栈顶下标
int _capacity; //容量
}Stack;
void StackInit(Stack* pst);
void StackDestory(Stack* ppst);
void StackPush(Stack* pst, STDataType x);
void StackPop(Stack* pst);
int StackSize(const Stack* pst);
//返回1是空,返回0是非空
int StackEmpty(Stack* pst);
//获取栈顶数据
STDataType StackTop(Stack* pst);实现
cpp
#define _CRT_SECURE_NO_WARNINGS
#include "stack.h"
void StackInit(Stack* pst)
{
assert(pst);
pst->_a = (STDataType*)malloc(sizeof(int) * N);
pst->_capacity = N;
pst->_top = 0;
//初始0:top在栈顶的下一个位置
//初始1:top在栈顶位置
}
void StackDestory(Stack* pst)
{
assert(pst);
free(pst->_a);
pst->_a = NULL;
pst->_capacity = 0;
pst->_top = -1;
}
void StackPush(Stack* pst, STDataType x)
{
assert(pst);
if (pst->_top == pst->_capacity)
{
pst->_capacity *= 2;
STDataType* tmp= (STDataType*)realloc(pst->_a, sizeof(STDataType) * pst->_capacity);
if (tmp == NULL)
{
printf("内存不足\n");
exit(-1);
}
else
{
pst->_a = tmp;
}
}
pst->_a[pst->_top] = x;
pst->_top++;
}
void StackPop(Stack* pst)
{
assert(pst);
assert(pst->_top > 0);
//if(pst->_top>0)
pst->_top--;
}
int StackSize(const Stack* pst)
{
assert(pst);
return pst->_top;
}
STDataType StackTop(Stack* pst)
{
assert(pst);
assert(pst->_top > 0);
return pst->_a[pst->_top - 1];
}
int StackEmpty(Stack* pst)
{
assert(pst);
return !pst->_top;
}队列
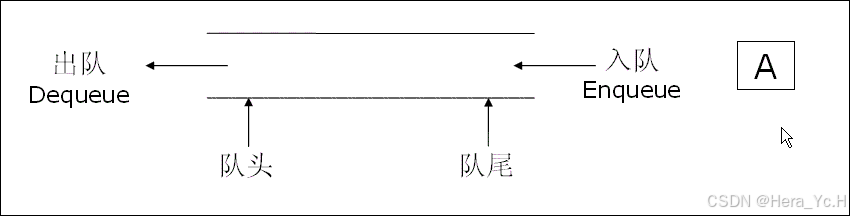
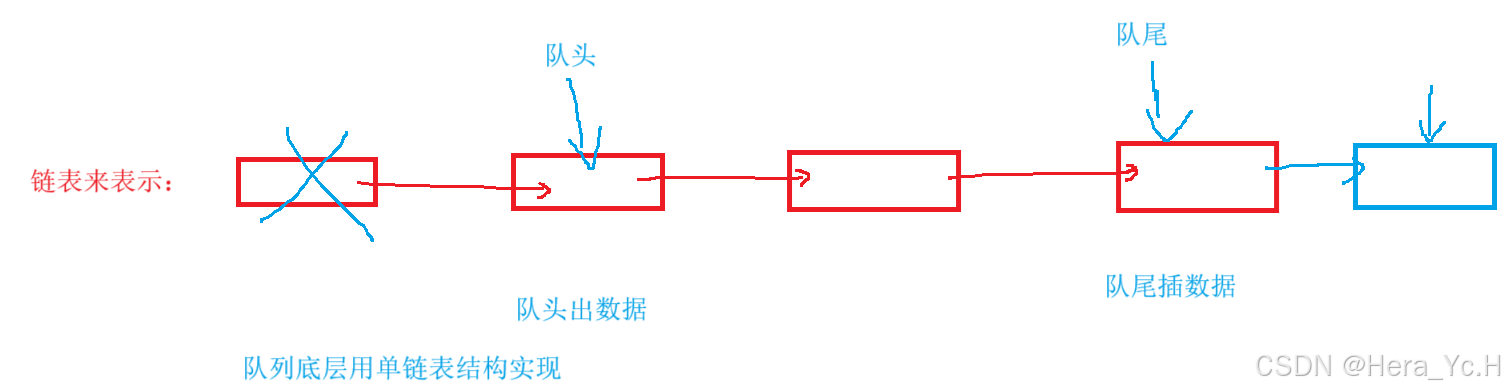
队列 :只允许在一端进行插入数据操作,在另一端进行删除数据操作的特殊线性表。
队列具有先进先出FIFO(First In First Out)
- 入队列 :进行插入操作的一端称为队尾。
- 出队列 :进行删除操作的一端称为队头。
数组来实现:无论是哪一边做队头,都需要挪动数据,开销大效率低。(不挪动数据相对复杂)。
链表实现:
头文件
cpp
#pragma once
#include <stdio.h>
#include <stdlib.h>
#include <assert.h>
typedef int QDataType;
typedef struct QueueNode
{
struct QueueNode* _next;
QDataType _data;
}QueueNode;
typedef struct Queue
{
QueueNode* _head;
QueueNode* _tail;
}Queue;
void QueueInit(Queue* pq);
void QueueDestory(Queue* pq);
//出入队
void QueuePush(Queue* pq, QDataType x);
void QueuePop(Queue* pq);
QDataType QueueFront(Queue* pq);
QDataType QueueBack(Queue* pq);
//返回1是空,返回0是非空
int QueueEmpty(Queue* pst);
//获取栈顶数据
QDataType QueueTop(Queue* pst);实现
cpp
#define _CRT_SECURE_NO_WARNINGS
#include "queue.h"
void QueueInit(Queue* pq)
{
assert(pq);
pq->_head = pq->_tail = NULL;
}
void QueueDestory(Queue* pq)
{
assert(pq);
QueueNode* cur = pq->_head;
while (cur)
{
QueueNode* next = cur->_next;
free(cur);
cur = next;
}
pq->_head = pq->_tail = NULL;
}
//出入队
void QueuePush(Queue* pq, QDataType x)
{
assert(pq);
QueueNode* newnode = (QueueNode*)malloc(sizeof(QueueNode));
if (newnode == NULL)
{
exit(-1);
}
newnode->_data = x;
newnode->_next = NULL;
if (pq->_head == NULL)
{
pq->_head = pq->_tail = newnode;
}
else
{
pq->_tail->_next = newnode;
pq->_tail = newnode;
}
}
void QueuePop(Queue* pq)
{
assert(pq);
assert(pq->_head);
QueueNode* next = pq->_head->_next;
free(pq->_head);
pq->_head = next;
if (pq->_head == NULL)
{
pq->_tail = NULL;
}
}
QDataType QueueFront(Queue* pq)
{
assert(pq&&pq->_head);
return pq->_head->_data;
}
QDataType QueueBack(Queue* pq)
{
assert(pq && pq->_tail);
return pq->_tail->_data;
}
//返回1是空,返回0是非空
int QueueEmpty(Queue* pq)
{
return pq->_head == NULL ? 1 : 0;
}
//获取栈顶数据
QDataType QueueTop(Queue* pq)
{
assert(pq);
int sz = 0;
QueueNode* cur = pq->_head;
while (cur)
{
sz++;
cur = cur->_next;
}
return sz;
}数据结构的栈和堆和内存中的堆栈有什么区别?
- 数据结构的栈、堆:**存储和管理数据,**解决一些一些问题。
- 内存中的堆栈:虚拟进程地址空间分段。一段内存区域的划分。
数据结构的栈和内存的栈都满足"后进先出"的规则。
循环队列
循环队列用数组实现更容易判断队列的空满。

cpp
typedef struct {
int*_a;
int front;
int rear;
int k;
} MyCircularQueue;
bool myCircularQueueIsFull(MyCircularQueue* obj);
MyCircularQueue* myCircularQueueCreate(int k) {
MyCircularQueue* q=(MyCircularQueue*)malloc(sizeof(MyCircularQueue));
q->_a=(int*)malloc(sizeof(int)*(k+1));
q->front=q->rear=0;
q->k=k;
return q;
}
bool myCircularQueueEnQueue(MyCircularQueue* obj, int value) {
if(myCircularQueueIsFull(obj))
{
return false;
}
else
{
obj->_a[obj->rear]=value;
obj->rear = (obj->rear+1)%(obj->k+1);
return true;
}
}
bool myCircularQueueDeQueue(MyCircularQueue* obj) {
if(obj->front==obj->rear)
{
return false;
}
else
{
obj->front = (obj->front+1)%(obj->k+1);
return true;
}
}
int myCircularQueueFront(MyCircularQueue* obj) {
if(obj->front==obj->rear)
{
return -1;
}
return obj->_a[obj->front];
}
int myCircularQueueRear(MyCircularQueue* obj) {
if(obj->front==obj->rear)
{
return -1;
}
int tail=obj->rear-1;
if(tail==-1)
{
tail=obj->k;
}
return obj->_a[tail];
}
bool myCircularQueueIsEmpty(MyCircularQueue* obj) {
return obj->front==obj->rear;
}
bool myCircularQueueIsFull(MyCircularQueue* obj) {
return (obj->rear+1)%(obj->k+1)==obj->front;
}
void myCircularQueueFree(MyCircularQueue* obj) {
free(obj->_a);
free(obj);
}