在Ubuntu 20.04和ROS中使用RViz进行数据可视化:详解Fixed Frame参数的选择与应用
在ROS的可视化工具RViz中,"Fixed Frame"是一个关键的全局选项,它设置了一个参考坐标系,用于解释和显示所有其他坐标系中的数据。通过您提供的图示,我们可以更具体地探讨如何在实际应用中选择和使用"Fixed Frame"。
解释Fixed Frame
Fixed Frame 参数定义了RViz中用于显示所有可视化数据的基准坐标系。所有从传感器或其他来源接收的数据都将根据这个固定坐标系进行转换和解释,以便在RViz中正确显示。
图中坐标系解析
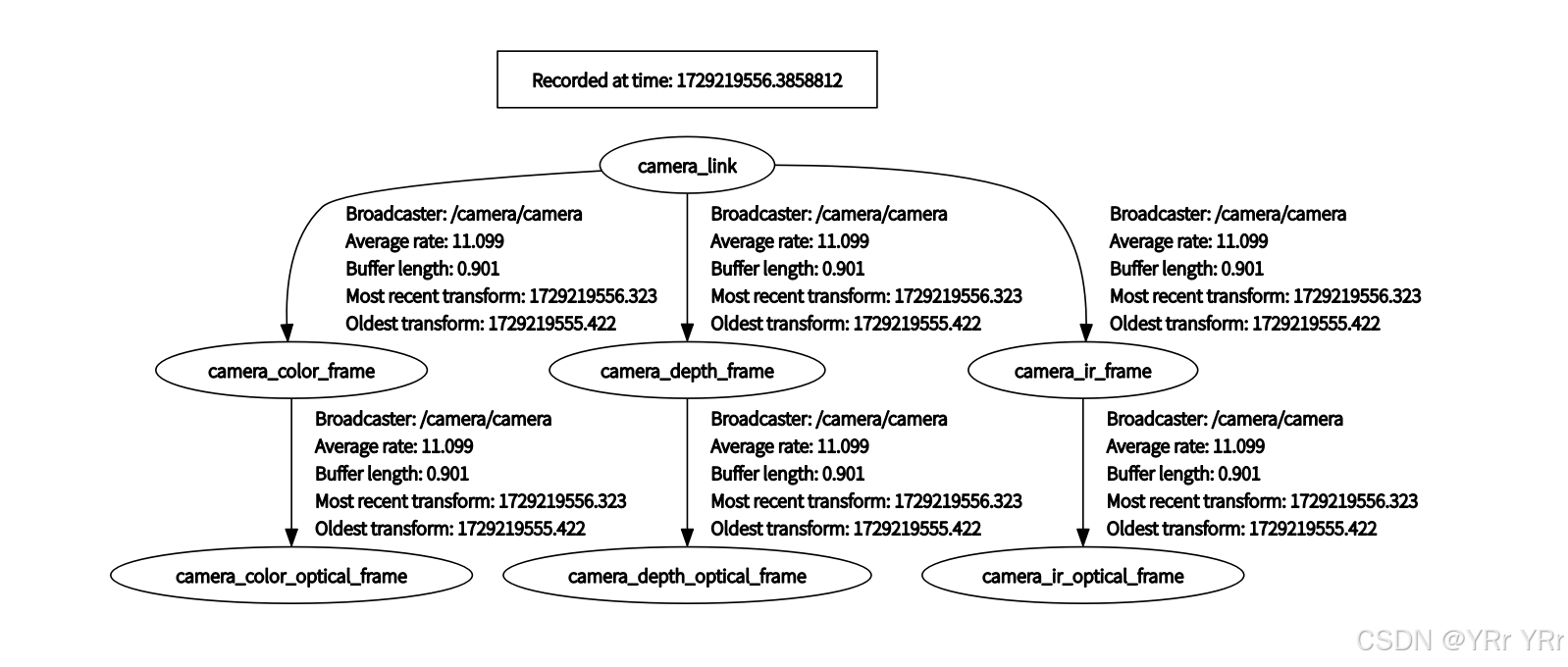
从您提供的图中,我们可以看到多个与相机相关的坐标系,包括:
- camera_link
- camera_color_frame
- camera_depth_frame
- camera_ir_frame
- camera_color_optical_frame
- camera_depth_optical_frame
- camera_ir_optical_frame
每个坐标系都有与之相关的数据,例如颜色数据、深度数据和红外数据,以及各自的光学版本,这些光学坐标系通常用于图像处理。
如何选择Fixed Frame
选择正确的"Fixed Frame"依赖于你希望如何观察和分析数据:
-
如果关注相机的总体位置和定位:
- Fixed Frame 应设置为 camera_link。
- 这种设置适用于需要观察相机相对于机器人或环境其他部分的位置时。
-
如果关注特定类型的图像数据处理:
- 例如,处理颜色图像数据时,选择 camera_color_optical_frame 作为 Fixed Frame。
- 这有助于确保颜色图像数据正确对齐和呈现,特别是当处理图像识别或跟踪任务时。
使用示例
假设您正在使用深度相机进行空间测量或导航,并希望深度图像能准确地反映环境信息,您可能会设置:
- Fixed Frame 为 camera_depth_optical_frame。
- 在RViz中,这会确保所有基于深度数据的视觉化内容都是以深度相机的视角和参数正确展示的。
设置Fixed Frame
在RViz中,设置Fixed Frame通常通过以下步骤完成:
- 打开RViz。
- 在左侧的 Displays 面板中,找到 Global Options。
- 在 Fixed Frame 的下拉菜单中选择合适的坐标系(如 camera_depth_optical_frame)。
这样设置后,所有的视觉化数据将根据选定的固定坐标系进行转换和显示,确保视觉化内容的准确性和实用性。
总结
通过理解和正确设置Fixed Frame,您可以有效地利用RViz为您的ROS项目提供准确和有用的可视化支持。根据具体的应用需求(例如,导航、对象跟踪或图像处理),恰当地选择Fixed Frame是实现有效数据解释和表达的关键步骤。