识别框架还是沿用之前的了MediaPipe Hand。
背景知识不摘重复,参见之前的:亚博microros小车-原生ubuntu支持系列:10-画笔-CSDN博客
手指控制
src/yahboom_esp32_mediapipe/yahboom_esp32_mediapipe/目录下新建文件10_HandCtrl.py,代码如下:
python
#!/usr/bin/env python3
# encoding: utf-8
import math
import time
import cv2 as cv
import numpy as np
import mediapipe as mp
import rclpy
from rclpy.node import Node
from cv_bridge import CvBridge
from sensor_msgs.msg import Image, CompressedImage
from rclpy.time import Time
import datetime
volPer = value = index = 0
effect = ["color", "thresh", "blur", "hue", "enhance"]
volBar = 400
class handDetector:
def __init__(self, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5):
self.tipIds = [4, 8, 12, 16, 20]
self.mpHand = mp.solutions.hands
self.mpDraw = mp.solutions.drawing_utils
self.hands = self.mpHand.Hands(#模型初始化
static_image_mode=mode,
max_num_hands=maxHands,
min_detection_confidence=detectorCon,
min_tracking_confidence=trackCon
)
self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=15)
self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=10, circle_radius=10)
#距离计算
def get_dist(self, point1, point2):
x1, y1 = point1
x2, y2 = point2
return abs(math.sqrt(math.pow(abs(y1 - y2), 2) + math.pow(abs(x1 - x2), 2)))
#计算角度
def calc_angle(self, pt1, pt2, pt3):
point1 = self.lmList[pt1][1], self.lmList[pt1][2]
point2 = self.lmList[pt2][1], self.lmList[pt2][2]
point3 = self.lmList[pt3][1], self.lmList[pt3][2]
a = self.get_dist(point1, point2)
b = self.get_dist(point2, point3)
c = self.get_dist(point1, point3)
try:#余弦定理
radian = math.acos((math.pow(a, 2) + math.pow(b, 2) - math.pow(c, 2)) / (2 * a * b))
angle = radian / math.pi * 180#弧度转角度
except:
angle = 0
return abs(angle)
def findHands(self, frame, draw=True):
img = np.zeros(frame.shape, np.uint8)
img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)#图像格式转换
self.results = self.hands.process(img_RGB)#检测
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:#输出关键点
if draw: self.mpDraw.draw_landmarks(img, handLms, self.mpHand.HAND_CONNECTIONS)
return img
def findPosition(self, frame, draw=True):
self.lmList = []
if self.results.multi_hand_landmarks:
for id, lm in enumerate(self.results.multi_hand_landmarks[0].landmark):
# print(id,lm)
h, w, c = frame.shape
cx, cy = int(lm.x * w), int(lm.y * h)
# print(id, lm.x, lm.y, lm.z)
self.lmList.append([id, cx, cy])#记录指点序号与坐标
if draw: cv.circle(frame, (cx, cy), 15, (0, 0, 255), cv.FILLED)
return self.lmList
def frame_combine(slef,frame, src):
if len(frame.shape) == 3:
frameH, frameW = frame.shape[:2]
srcH, srcW = src.shape[:2]
dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8)
dst[:, :frameW] = frame[:, :]
dst[:, frameW:] = src[:, :]
else:
src = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
frameH, frameW = frame.shape[:2]
imgH, imgW = src.shape[:2]
dst = np.zeros((frameH, frameW + imgW), np.uint8)
dst[:, :frameW] = frame[:, :]
dst[:, frameW:] = src[:, :]
return dst
class MY_Picture(Node):
def __init__(self, name):
super().__init__(name)
self.bridge = CvBridge()
self.sub_img = self.create_subscription(
CompressedImage, '/espRos/esp32camera', self.handleTopic, 1) #获取esp32传来的图像
self.hand_detector = handDetector()
self.volPer = self.value = self.index = 0
self.effect = ["color", "thresh", "blur", "hue", "enhance"]
self.volBar = 400
self.last_stamp = None
self.new_seconds = 0
self.fps_seconds = 1
def handleTopic(self, msg):
self.last_stamp = msg.header.stamp
if self.last_stamp:
total_secs = Time(nanoseconds=self.last_stamp.nanosec, seconds=self.last_stamp.sec).nanoseconds
delta = datetime.timedelta(seconds=total_secs * 1e-9)
seconds = delta.total_seconds()*100
if self.new_seconds != 0:
self.fps_seconds = seconds - self.new_seconds
self.new_seconds = seconds#保留这次的值
start = time.time()
frame = self.bridge.compressed_imgmsg_to_cv2(msg)
frame = cv.resize(frame, (640, 480))
action = cv.waitKey(1) & 0xFF
img = self.hand_detector.findHands(frame)
lmList = self.hand_detector.findPosition(frame, draw=False)
if len(lmList) != 0:
angle = self.hand_detector.calc_angle(4, 0, 8)#计算拇指,0点,食指尖的角度
x1, y1 = lmList[4][1], lmList[4][2]
x2, y2 = lmList[8][1], lmList[8][2]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2
cv.circle(img, (x1, y1), 15, (255, 0, 255), cv.FILLED)
cv.circle(img, (x2, y2), 15, (255, 0, 255), cv.FILLED)
cv.line(img, (x1, y1), (x2, y2), (255, 0, 255), 3)
cv.circle(img, (cx, cy), 15, (255, 0, 255), cv.FILLED)
if angle <= 10: cv.circle(img, (cx, cy), 15, (0, 255, 0), cv.FILLED)
self.volBar = np.interp(angle, [0, 70], [400, 150])
self.volPer = np.interp(angle, [0, 70], [0, 100])
self.value = np.interp(angle, [0, 70], [0, 255])
# print("angle: {},self.value: {}".format(angle, self.value))
print(f'mode:{self.effect[self.index]}')
# 进行阈值二值化操作,大于阈值value的,使用255表示,小于阈值value的,使用0表示
if self.effect[self.index]=="thresh":
gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)
frame = cv.threshold(gray, self.value, 255, cv.THRESH_BINARY)[1]
# 进行高斯滤波,(21, 21)表示高斯矩阵的长与宽都是21,标准差取value
elif self.effect[self.index]=="blur":
frame = cv.GaussianBlur(frame, (21, 21), np.interp(self.value, [0, 255], [0, 11]))
# 色彩空间的转化,HSV转换为BGR
elif self.effect[self.index]=="hue":
frame = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
frame[:, :, 0] += int(self.value)
frame = cv.cvtColor(frame, cv.COLOR_HSV2BGR)
# 调节对比度
elif self.effect[self.index]=="enhance":
enh_val = self.value / 40
clahe = cv.createCLAHE(clipLimit=enh_val, tileGridSize=(8, 8))
lab = cv.cvtColor(frame, cv.COLOR_BGR2LAB)
lab[:, :, 0] = clahe.apply(lab[:, :, 0])
frame = cv.cvtColor(lab, cv.COLOR_LAB2BGR)
if action == ord('f'):
self.index += 1
if self.index >= len(self.effect): self.index = 0
end = time.time()
fps = 1 / ((end - start)+self.fps_seconds)
text = "FPS : " + str(int(fps))
cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)
cv.rectangle(img, (50, 150), (85, 400), (255, 0, 0), 3)
cv.rectangle(img, (50, int(self.volBar)), (85, 400), (0, 255, 0), cv.FILLED)
cv.putText(img, f'{int(self.volPer)}%', (40, 450), cv.FONT_HERSHEY_COMPLEX, 1, (0, 255, 0), 3)
dst = self.hand_detector.frame_combine(frame, img)
cv.imshow('dst', dst)
def main():
print("start it")
rclpy.init()
esp_img = MY_Picture("My_Picture")
try:
rclpy.spin(esp_img)
except KeyboardInterrupt:
pass
finally:
esp_img.destroy_node()
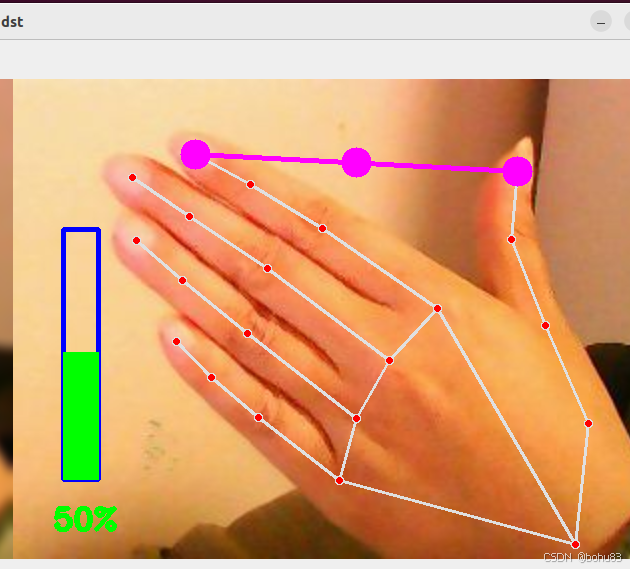
rclpy.shutdown()订阅esp32传出来的图像后,通过MediaPipe去做相关的识别后,再通过记录手指的点坐标,计算角4-0-8之间度数。本节与之前不同,增加了opencv输出的格式,"color", "thresh", "blur", "hue", "enhance"。默认是color,还有阈值化输出,高斯模糊等其他效果。按F键切换
构建后运行:
ros2 run yahboom_esp32_mediapipe HandCtrl
效果如下:

手势识别
src/yahboom_esp32_mediapipe/yahboom_esp32_mediapipe/目录下新建文件11_GestureRecognition.py,代码如下
python
#!/usr/bin/env python3
# encoding: utf-8
import math
import time
import cv2 as cv
import numpy as np
import mediapipe as mp
import rclpy
from rclpy.node import Node
from cv_bridge import CvBridge
from sensor_msgs.msg import Image, CompressedImage
from rclpy.time import Time
import datetime
class handDetector:
def __init__(self, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5):
self.tipIds = [4, 8, 12, 16, 20]
self.mpHand = mp.solutions.hands
self.mpDraw = mp.solutions.drawing_utils
self.hands = self.mpHand.Hands(
static_image_mode=mode,
max_num_hands=maxHands,
min_detection_confidence=detectorCon,
min_tracking_confidence=trackCon
)
self.lmList = []
self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=6)
self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=2, circle_radius=2)
def get_dist(self, point1, point2):
x1, y1 = point1
x2, y2 = point2
return abs(math.sqrt(math.pow(abs(y1 - y2), 2) + math.pow(abs(x1 - x2), 2)))
def calc_angle(self, pt1, pt2, pt3):
point1 = self.lmList[pt1][1], self.lmList[pt1][2]
point2 = self.lmList[pt2][1], self.lmList[pt2][2]
point3 = self.lmList[pt3][1], self.lmList[pt3][2]
a = self.get_dist(point1, point2)
b = self.get_dist(point2, point3)
c = self.get_dist(point1, point3)
try:
radian = math.acos((math.pow(a, 2) + math.pow(b, 2) - math.pow(c, 2)) / (2 * a * b))
angle = radian / math.pi * 180
except:
angle = 0
return abs(angle)
def findHands(self, frame, draw=True):
self.lmList = []
img = np.zeros(frame.shape, np.uint8)
img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)
self.results = self.hands.process(img_RGB)
if self.results.multi_hand_landmarks:
for i in range(len(self.results.multi_hand_landmarks)):
if draw: self.mpDraw.draw_landmarks(frame, self.results.multi_hand_landmarks[i], self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec)
self.mpDraw.draw_landmarks(img, self.results.multi_hand_landmarks[i], self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec)
for id, lm in enumerate(self.results.multi_hand_landmarks[i].landmark):
h, w, c = frame.shape
cx, cy = int(lm.x * w), int(lm.y * h)
self.lmList.append([id, cx, cy])
return frame, img
def frame_combine(slef,frame, src):
if len(frame.shape) == 3:
frameH, frameW = frame.shape[:2]
srcH, srcW = src.shape[:2]
dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8)
dst[:, :frameW] = frame[:, :]
dst[:, frameW:] = src[:, :]
else:
src = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
frameH, frameW = frame.shape[:2]
imgH, imgW = src.shape[:2]
dst = np.zeros((frameH, frameW + imgW), np.uint8)
dst[:, :frameW] = frame[:, :]
dst[:, frameW:] = src[:, :]
return dst
def fingersUp(self):
fingers=[]
# Thumb
if (self.calc_angle(self.tipIds[0],
self.tipIds[0] - 1,
self.tipIds[0] - 2) > 150.0) and (
self.calc_angle(
self.tipIds[0] - 1,
self.tipIds[0] - 2,
self.tipIds[0] - 3) > 150.0): fingers.append(1)
else:
fingers.append(0)
# 4 finger
for id in range(1, 5):
if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]:
fingers.append(1)
else:
fingers.append(0)
return fingers
def get_gesture(self):
gesture = ""
fingers = self.fingersUp()
if self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[1]][2] and \
self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[2]][2] and \
self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[3]][2] and \
self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[4]][2] : gesture = "Thumb_down"
elif self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[1]][2] and \
self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[2]][2] and \
self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[3]][2] and \
self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[4]][2] and \
self.calc_angle(self.tipIds[1] - 1, self.tipIds[1] - 2, self.tipIds[1] - 3) < 150.0 : gesture = "Thumb_up"
if fingers.count(1) == 3 or fingers.count(1) == 4:
if fingers[0] == 1 and (
self.get_dist(self.lmList[4][1:], self.lmList[8][1:])<self.get_dist(self.lmList[4][1:], self.lmList[5][1:])
): gesture = "OK"
elif fingers[2] == fingers[3] == 0: gesture = "Rock"
elif fingers.count(1) == 3: gesture = "Three"
else: gesture = "Four"
elif fingers.count(1) == 0: gesture = "Zero"
elif fingers.count(1) == 1: gesture = "One"
elif fingers.count(1) == 2:
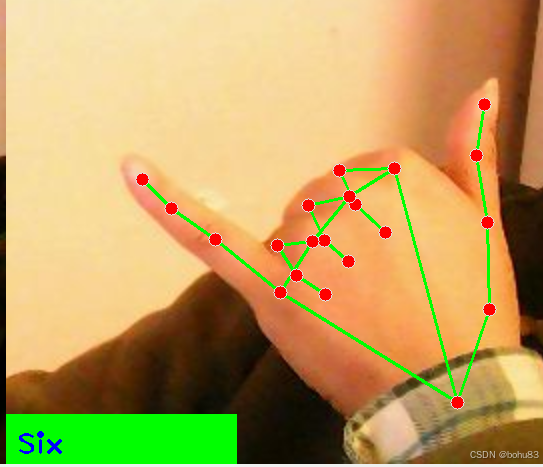
if fingers[0] == 1 and fingers[4] == 1: gesture = "Six"
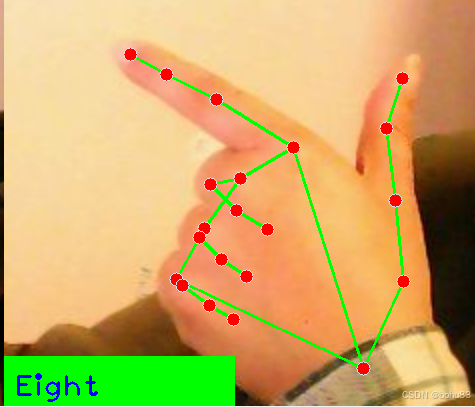
elif fingers[0] == 1 and self.calc_angle(4, 5, 8) > 90: gesture = "Eight"
elif fingers[0] == fingers[1] == 1 and self.get_dist(self.lmList[4][1:], self.lmList[8][1:]) < 50: gesture = "Heart_single"
else: gesture = "Two"
elif fingers.count(1)==5:gesture = "Five"
if self.get_dist(self.lmList[4][1:], self.lmList[8][1:]) < 60 and \
self.get_dist(self.lmList[4][1:], self.lmList[12][1:]) < 60 and \
self.get_dist(self.lmList[4][1:], self.lmList[16][1:]) < 60 and \
self.get_dist(self.lmList[4][1:], self.lmList[20][1:]) < 60 : gesture = "Seven"
if self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[1]][2] and \
self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[2]][2] and \
self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[3]][2] and \
self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[4]][2] and \
self.calc_angle(self.tipIds[1] - 1, self.tipIds[1] - 2, self.tipIds[1] - 3) > 150.0 : gesture = "Eight"
return gesture
class MY_Picture(Node):
def __init__(self, name):
super().__init__(name)
self.bridge = CvBridge()
self.sub_img = self.create_subscription(
CompressedImage, '/espRos/esp32camera', self.handleTopic, 1) #获取esp32传来的图像
self.hand_detector = handDetector(detectorCon=0.75)
self.last_stamp = None
self.new_seconds = 0
self.fps_seconds = 1
def handleTopic(self, msg):
self.last_stamp = msg.header.stamp
if self.last_stamp:
total_secs = Time(nanoseconds=self.last_stamp.nanosec, seconds=self.last_stamp.sec).nanoseconds
delta = datetime.timedelta(seconds=total_secs * 1e-9)
seconds = delta.total_seconds()*100
if self.new_seconds != 0:
self.fps_seconds = seconds - self.new_seconds
self.new_seconds = seconds#保留这次的值
start = time.time()
frame = self.bridge.compressed_imgmsg_to_cv2(msg)
frame = cv.resize(frame, (640, 480))
cv.waitKey(1)
frame, img = self.hand_detector.findHands(frame, draw=False)
if len(self.hand_detector.lmList) != 0:
totalFingers = self.hand_detector.get_gesture()
cv.rectangle(frame, (0, 430), (230, 480), (0, 255, 0), cv.FILLED)
cv.putText(frame, str(totalFingers), (10, 470), cv.FONT_HERSHEY_PLAIN, 2, (255, 0, 0), 2)
end = time.time()
fps = 1 / ((end - start)+self.fps_seconds)
text = "FPS : " + str(int(fps))
cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)
dist = self.hand_detector.frame_combine(frame, img)
cv.imshow('dist', dist)
'''
Zero One Two Three Four Five Six Seven Eight
Ok: OK
Rock: rock
Thumb_up : 点赞
Thumb_down: 拇指向下
Heart_single: 单手比心
'''
def main():
print("start it")
rclpy.init()
esp_img = MY_Picture("My_Picture")
try:
rclpy.spin(esp_img)
except KeyboardInterrupt:
pass
finally:
esp_img.destroy_node()
rclpy.shutdown()网上有不少这个例子,差异点可能在手势识别哪里,前面的hand模型都是一样的。
根据你预计的指点判断角度或者漏出的手指组合判断含义。有的也不太准确,大部分能识别。
构建后运行:ros2 run yahboom_esp32_mediapipe GestureRecognition