背景介绍
线扫相机通过光栅尺的脉冲触发, 我在调试线扫过程中,发现图像被拉伸,预设调节分配器。图像正常后,我提高的相机的扫描速度(Y轴动的更快了)。
动的更快的发现,图像变短了(以前设置的高度为1000,现在高度明显变短了,但是出图了),而且又畸形了。此时不管怎么调节速度,都无法改变畸形。
问题分析
我初步分析是相机丢帧了,无法跟上当前的速度,我把速度降下来之后,图片就正常了。但是我此次用的是光口相机,不至于这么慢的速度都不支持(当时2秒跑半的速度)。应该跑的更快。后面咨询的海康的技术,发现是曝光调的太大了(150us),导致支持行频变低了。
问题解决
于是将曝光调成15us,然后将光源调到最大,这样速度就能上去了。
之前还遇到一个类似的问题。之前相机的行触发接到的是欧姆龙的驱动器。
欧姆龙驱动器有个特点,每毫米发出的脉冲特别多(有400多万个脉冲),
也导致相机行频跟不上,最后相机设置分频100图像才正常。
所以这两个问题就能归结为一类问题,就是外界行频和相机当前支持最大的行频不匹配。
解决方案
1、降低外界的输入行频
2、降低相机的曝光,提高行频支持。
如何通过软件判断相机行频,以及支持多大的行频。
通过海康的MVS软件可以查看,相机支持的最高行频:

然后当相机跑起来后可以看相机的当前行频:
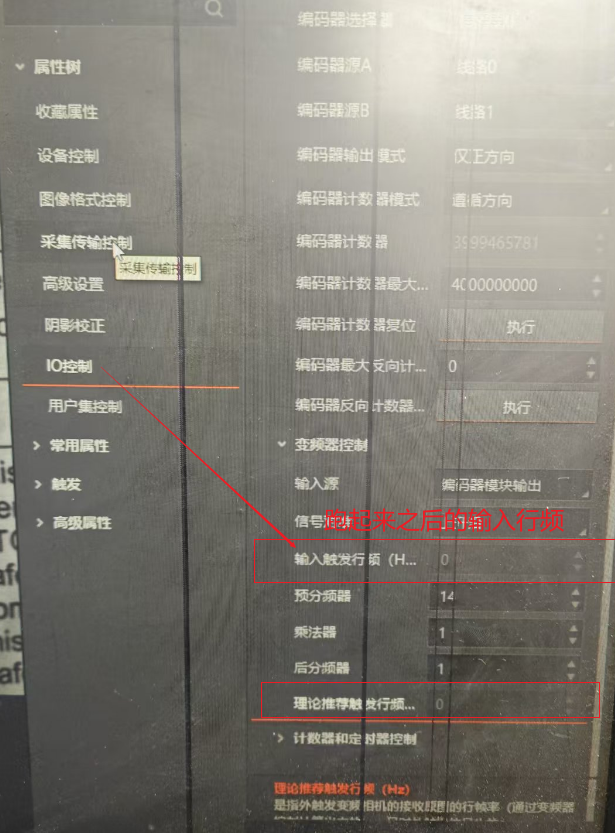
所以我们要做的就确保,输出的触发行频不要大于它最大支持的行频(这个最大行频,可以通过修改曝光改变。)