跨设备图像拼接:消除色彩偏差的 8 大策略及 OpenCV + Halcon 实战
- 🎯跨设备图像拼接:统一色彩偏差的8个核心策略,附OpenCV+Halcon实战代码!
-
- 🎯一、先搞懂:跨设备色彩偏差从哪来?
- 🎯二、8个核心策略:从基础校正到智能融合,按需选择
-
- [✅1. 策略1:参数归一化(源头控制,解决40%参数型偏差)](#✅1. 策略1:参数归一化(源头控制,解决40%参数型偏差))
- [✅2. 策略2:灰度卡校正(经典对标,实现基础色彩对齐)](#✅2. 策略2:灰度卡校正(经典对标,实现基础色彩对齐))
- [✅3. 策略3:直方图匹配(灰度分布对齐,解决亮度偏差)](#✅3. 策略3:直方图匹配(灰度分布对齐,解决亮度偏差))
- [✅4. 策略4:色域映射(色彩空间统一,解决空间型偏差)](#✅4. 策略4:色域映射(色彩空间统一,解决空间型偏差))
- [✅5. 策略5:特征区域色彩校准(局部精准对齐,解决局部色偏)](#✅5. 策略5:特征区域色彩校准(局部精准对齐,解决局部色偏))
- [✅6. 策略6:多尺度融合(过渡平滑,隐藏色彩断层)](#✅6. 策略6:多尺度融合(过渡平滑,隐藏色彩断层))
- [✅7. 策略7:在线色彩校准(应对环境动态变化)](#✅7. 策略7:在线色彩校准(应对环境动态变化))
- [✅8. 策略8:深度学习色彩迁移(复杂场景终极方案)](#✅8. 策略8:深度学习色彩迁移(复杂场景终极方案))
- 🎯三、实战代码:OpenCV+Halcon实现跨设备色彩校正与拼接
-
- [✅1. OpenCV实现(直方图匹配+特征区域校准+图像拼接)](#✅1. OpenCV实现(直方图匹配+特征区域校准+图像拼接))
- [✅2. Halcon实现(色彩校正+图像拼接)](#✅2. Halcon实现(色彩校正+图像拼接))
- 代码关键说明
- 🎯四、工业落地:4个关键技巧,让色彩统一更稳定
-
- [✅1. 硬件选型优先统一](#✅1. 硬件选型优先统一)
- [✅2. 校准标靶定期更新](#✅2. 校准标靶定期更新)
- [✅3. 分区域处理复杂场景](#✅3. 分区域处理复杂场景)
- [✅4. 实时监控色彩偏差](#✅4. 实时监控色彩偏差)
- 🎯五、避坑指南:3个常见误区
- 🎯六、总结:跨设备图像拼接的"核心逻辑"
🎯跨设备图像拼接:统一色彩偏差的8个核心策略,附OpenCV+Halcon实战代码!
做工业视觉拼接的工程师,几乎都栽过"色彩偏差"的跟头:多台相机拍摄的同一块光伏板,有的偏蓝、有的偏黄,拼接后出现明显的色彩断层;跨产线采集的汽车车身图像,不同设备拍出来的漆面亮度天差地别,拼接后的全景图成了"调色盘",直接导致缺陷检测漏判。
这就是跨设备图像拼接的核心痛点 ------不同相机的传感器特性、曝光参数、白平衡设置不同,甚至同一品牌相机的批次差异,都会让图像的色彩空间、亮度对比度出现偏差,而拼接的本质不仅是几何对齐,更是色彩的统一融合。
今天就拆解统一跨设备图像色彩偏差的8个核心策略,从基础的色彩校正到高级的深度学习色彩迁移,还附上OpenCV和Halcon的可运行代码,帮你实现跨设备图像的"无缝无色差拼接"!
🎯一、先搞懂:跨设备色彩偏差从哪来?

跨设备图像的色彩偏差,本质是不同设备的成像链路对光的响应特性不同,工业场景中主要分5类根源:
-
硬件固有差异:相机传感器的感光灵敏度、滤光片波长响应不同(如索尼IMX307与IMX477传感器的色彩表现差异);
-
参数设置不同:各相机的曝光时间、增益、白平衡、伽马值不一致;
-
光照环境差异:多相机拍摄时的光源角度、亮度分布不同(如产线左侧灯光明亮,右侧光线较暗);
-
镜头影响:不同镜头的透光率、色偏特性不同(如广角镜头边缘易偏紫);
-
后处理差异:部分相机自带的色彩增强算法,会让图像色彩偏离原始值。
简单说:色彩偏差是"硬件+参数+环境"的综合结果,8个策略正是从这三个维度层层破解,实现色彩的统一。
🎯二、8个核心策略:从基础校正到智能融合,按需选择
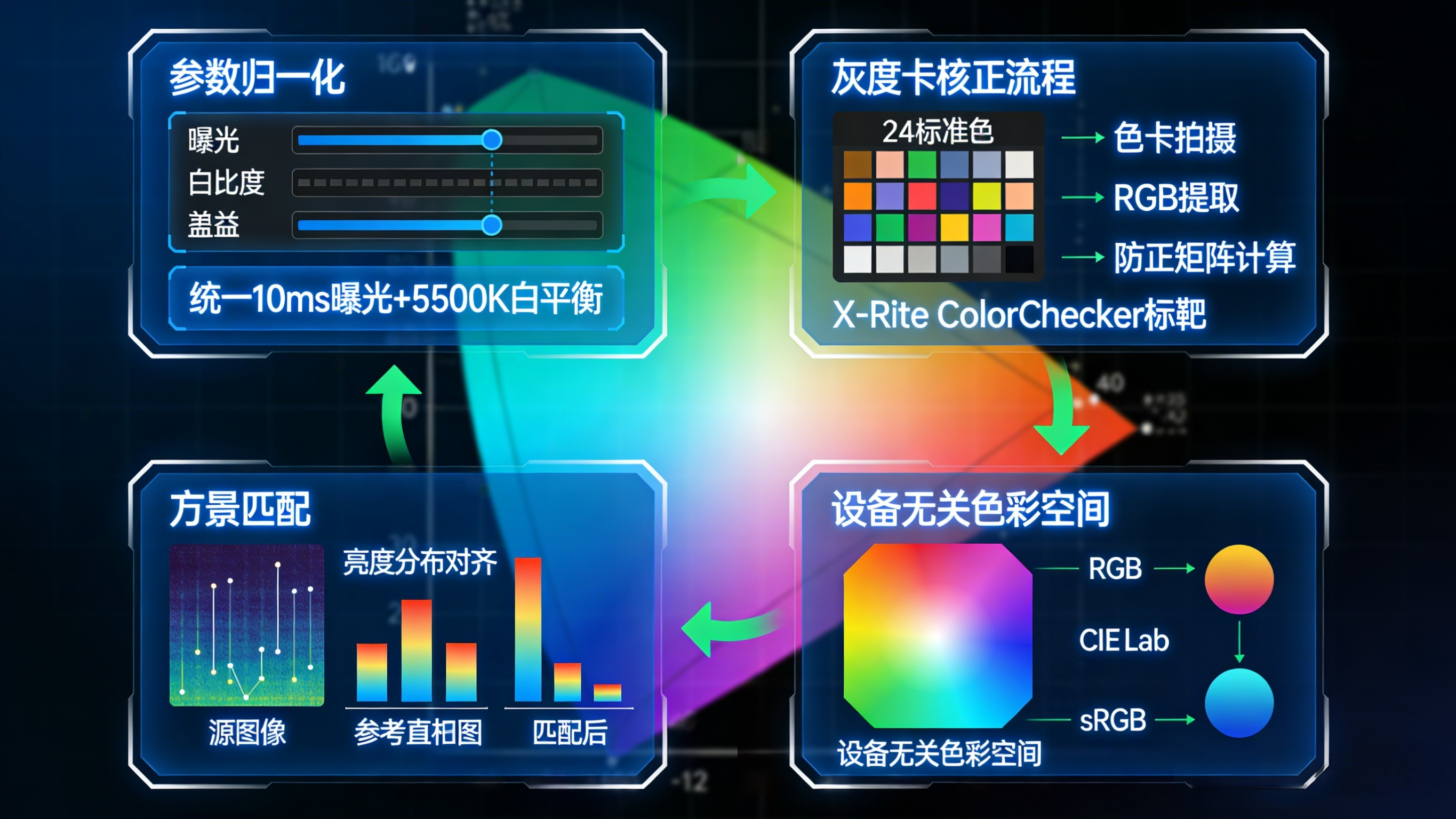
✅1. 策略1:参数归一化(源头控制,解决40%参数型偏差)
-
核心逻辑:统一所有拍摄设备的成像参数,从源头避免因参数不同导致的色彩偏差;
-
归一化内容:
-
基础参数:曝光时间(如统一设为10ms)、增益(设为1.0)、白平衡(设为5500K日光模式);
-
图像参数:伽马值(设为2.2)、对比度(设为1.0)、饱和度(设为1.0);
-
-
适用场景:同品牌、同型号相机的跨设备拼接(如3C产线的多相机视觉系统);
-
优势:零算法成本,操作简单,是跨设备色彩统一的"第一步";
-
注意:需确保所有相机的硬件支持参数统一调节(工业相机一般支持,消费级相机可能有限制)。
✅2. 策略2:灰度卡校正(经典对标,实现基础色彩对齐)
-
核心逻辑:用标准24色卡或灰度卡作为参考,让各设备拍摄同一色卡,计算色彩校正矩阵,将各设备的图像映射到标准色彩空间;
-
操作步骤:
-
所有相机拍摄同一标准灰度卡(如X-Rite ColorChecker);
-
提取色卡各色块的RGB值,与色卡的标准Lab值对比;
-
计算校正矩阵(如3×3线性变换矩阵),对图像进行色彩校正;
-
-
适用场景:不同品牌相机的跨设备拼接(如车间既有海康威视又有大华相机);
-
优势:算法成熟,能有效校正整体色偏,是工业色彩校正的"标配方法"。
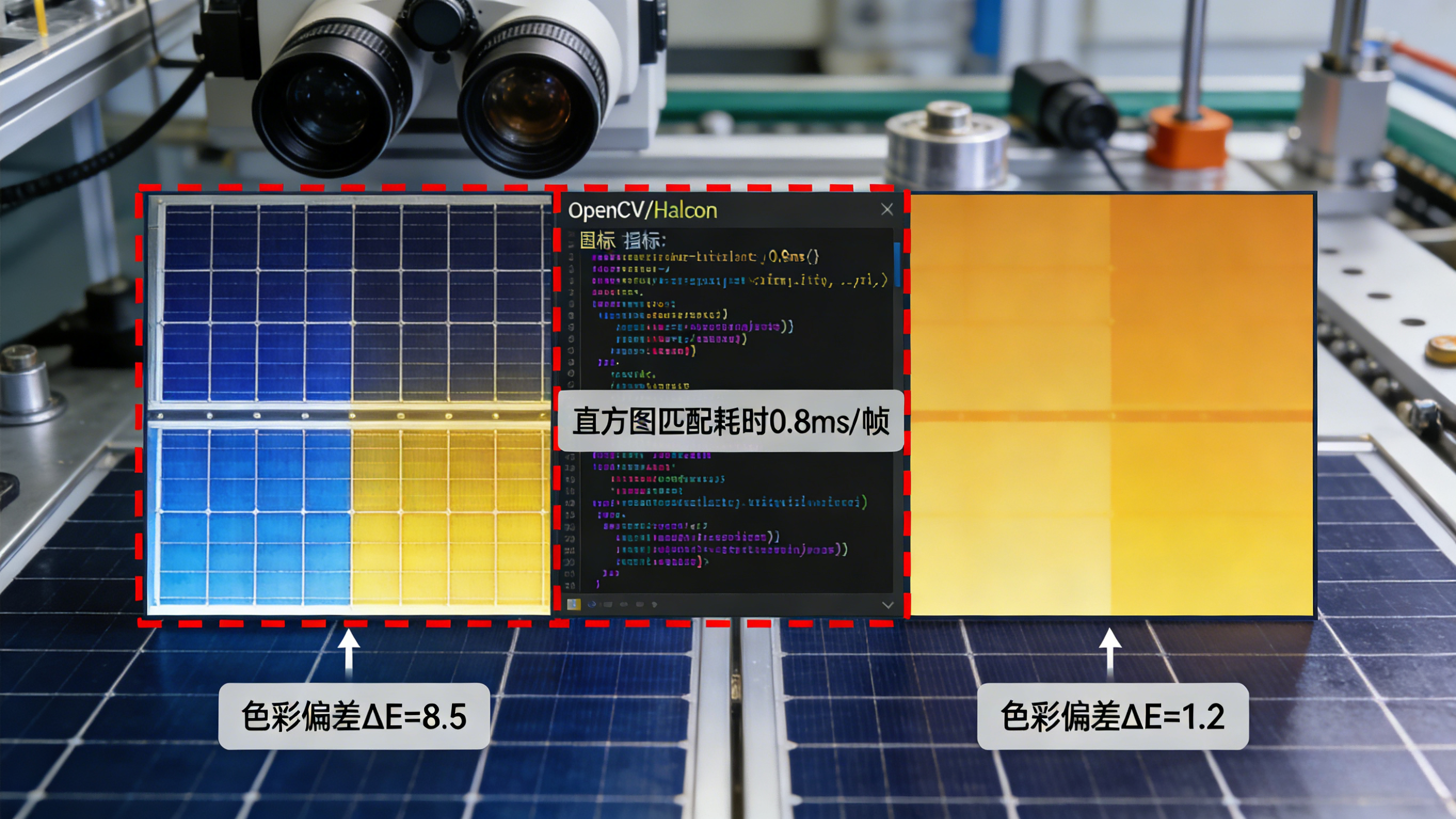
✅3. 策略3:直方图匹配(灰度分布对齐,解决亮度偏差)
-
核心逻辑:将待校正图像的灰度直方图,匹配到参考图像的直方图分布,让两者的亮度、对比度保持一致;
-
关键价值:重点解决"各设备图像亮度不均"的问题(如有的图像偏亮,有的偏暗),对色彩偏差也有辅助校正作用;
-
适用场景:光照环境差异导致的亮度/色彩偏差(如仓储物流的全景相机拼接);
-
优势 :计算速度快(单帧处理<1ms),实时性强,适合高速产线。

✅4. 策略4:色域映射(色彩空间统一,解决空间型偏差)
-
核心逻辑:将所有设备的图像从各自的设备相关色域(如相机原生RGB),转换到设备无关的标准色域(如CIE Lab、sRGB),再进行拼接;
-
转换方法:
-
线性转换:通过色彩校正矩阵将RGB转换为Lab;
-
非线性转换:用3D LUT(查找表)实现更精准的色域映射;
-
-
适用场景:高精度色彩要求的拼接场景(如汽车漆面检测、印刷品质量检测);
-
优势:从色彩空间层面统一,能消除设备固有色彩响应差异。
✅5. 策略5:特征区域色彩校准(局部精准对齐,解决局部色偏)
-
核心逻辑:在图像中选取重叠区域的特征点(如零件的固定边缘、标定点),以参考图像的特征区域色彩为标准,校正待拼接图像的对应区域色彩;
-
操作步骤:
-
在重叠区域提取特征点对;
-
计算特征区域的平均RGB值、方差等统计量;
-
对非参考图像的特征区域进行色彩调整,使其与参考区域一致;
-
-
适用场景:图像重叠区域有明显特征的拼接场景(如光伏板、电路板的多相机拼接);
-
优势:针对性校正重叠区域,拼接后过渡更自然,避免整体校正导致的局部失真。
✅6. 策略6:多尺度融合(过渡平滑,隐藏色彩断层)
-
核心逻辑:在图像拼接的融合阶段,采用多尺度金字塔融合(如拉普拉斯金字塔),让不同设备图像的色彩在重叠区域平滑过渡,即使存在轻微偏差,也能被隐藏;
-
关键价值:不是校正色彩偏差,而是"掩盖"偏差,适合偏差较小的场景;
-
适用场景:几何对齐精准、色彩偏差轻微的跨设备拼接(如会议室全景拼接);
-
优势:融合效果好,能提升拼接图像的视觉一致性。
✅7. 策略7:在线色彩校准(应对环境动态变化)
-
核心逻辑:在产线中设置固定的色彩参考标(如金属色标、彩色陶瓷块),每次拍摄前自动采集标靶图像,实时计算校正参数,应对光照、设备老化导致的色彩偏差;
-
实现方式:
-
硬件标靶:在拍摄视野中固定放置色标,定期采集校正;
-
软件标靶:利用图像中的固定特征(如零件的红色logo)作为参考;
-
-
适用场景:光照变化剧烈、设备长期运行的产线(如食品包装检测的多相机拼接);
-
优势:实时性强,能动态适应环境变化,保持色彩一致性。
✅8. 策略8:深度学习色彩迁移(复杂场景终极方案)
-
核心逻辑:用大量"跨设备偏差图像-无偏差参考图像"的配对样本训练深度学习模型(如CycleGAN、U-Net),让模型直接学习跨设备色彩的迁移规律,输出色彩统一的图像;
-
优势:
-
适应性强:能处理传统算法难以应对的非线性复杂色偏;
-
端到端学习:无需手动设计校正规则,模型自动学习;
-
-
适用场景:不同品牌、不同类型设备的跨设备拼接(如工业相机与无人机相机的图像拼接);
-
落地注意:需要大量标注样本和GPU加速,适合高要求、大批量的工业场景。
🎯三、实战代码:OpenCV+Halcon实现跨设备色彩校正与拼接
✅1. OpenCV实现(直方图匹配+特征区域校准+图像拼接)
Python
import cv2
import numpy as np
def histogram_matching(src, ref):
"""
直⽅图匹配:将源图像的直⽅图匹配到参考图像
"""
# 转换为Lab⾊彩空间(更适合⾊彩匹配)
src_lab = cv2.cvtColor(src, cv2.COLOR_BGR2LAB)
ref_lab = cv2.cvtColor(ref, cv2.COLOR_BGR2LAB)
# 对L通道进⾏直⽅图匹配
src_l, src_a, src_b = cv2.split(src_lab)
ref_l, ref_a, ref_b = cv2.split(ref_lab)
# 计算参考图像的直⽅图和累积分布
hist_ref, bins_ref = np.histogram(ref_l.flatten(), 256, [0,256])
cdf_ref = hist_ref.cumsum()
cdf_ref_normalized = cdf_ref / cdf_ref.max()
# 计算源图像的直⽅图和累积分布
hist_src, bins_src = np.histogram(src_l.flatten(), 256, [0,256])
cdf_src = hist_src.cumsum()
cdf_src_normalized = cdf_src / cdf_src.max()
# 构建映射表
mapping = np.zeros(256, dtype=np.uint8)
for i in range(256):
idx = np.argmin(np.abs(cdf_ref_normalized - cdf_src_normalized[i]))
mapping[i] = idx
# 应⽤映射
src_l_matched = mapping[src_l]
src_lab_matched = cv2.merge([src_l_matched, src_a, src_b])
src_matched = cv2.cvtColor(src_lab_matched, cv2.COLOR_LAB2BGR)
return src_matched
def feature_region_calibration(src, ref, feature_num=50):
"""
特征区域⾊彩校准:基于SIFT特征点的区域⾊彩校正
"""
# 提取SIFT特征点
sift = cv2.SIFT_create(nfeatures=feature_num)
kp1, des1 = sift.detectAndCompute(src, None)
kp2, des2 = sift.detectAndCompute(ref, None)
# 匹配特征点
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
# 提取特征点坐标
src_pts = np.float32([kp1[m.queryIdx].pt for m in
good_matches]).reshape(-1, 2)
ref_pts = np.float32([kp2[m.trainIdx].pt for m in
good_matches]).reshape(-1, 2)
# 计算特征点周围3×3区域的平均RGB值
src_rgb = []
ref_rgb = []
h, w = src.shape[:2]
for (x, y) in src_pts:
x = int(round(x))
y = int(round(y))
if 1 <= x < w-1 and 1 <= y < h-1:
roi = src[y-1:y+2, x-1:x+2]
src_rgb.append(np.mean(roi, axis=(0,1)))
for (x, y) in ref_pts:
x = int(round(x))
y = int(round(y))
if 1 <= x < w-1 and 1 <= y < h-1:
roi = ref[y-1:y+2, x-1:x+2]
ref_rgb.append(np.mean(roi, axis=(0,1)))
src_rgb = np.array(src_rgb)
ref_rgb = np.array(ref_rgb)
# 计算⾊彩校正系数(均值⽐)
if len(src_rgb) > 0 and len(ref_rgb) > 0:
scale = np.mean(ref_rgb / (src_rgb + 1e-6), axis=0)
src_calibrated = src * scale
src_calibrated = np.uint8(np.clip(src_calibrated, 0, 255))✅2. Halcon实现(色彩校正+图像拼接)
Plain
* 跨设备图像拼接:⾊彩校正+特征匹配拼接(⼯业级实现)
dev_close_window()
dev_open_window(0, 0, 1200, 600, 'black', WindowHandle)
* 1. 读取跨设备图像
read_image(Img1, 'camera1.jpg')
read_image(Img2, 'camera2.jpg')
get_image_size(Img1, Width1, Height1)
get_image_size(Img2, Width2, Height2)
* 2. ⾊彩校正:直⽅图匹配(灰度通道)
convert_image_type(Img1, Img1Float, 'real')
convert_image_type(Img2, Img2Float, 'real')
* 提取灰度通道
rgb1_to_gray(Img1, Img1Gray)
rgb1_to_gray(Img2, Img2Gray)
* 计算参考直⽅图
gray_histo(Img1Gray, Img1Gray, HistoRef, 256, 0, 255)
* 匹配直⽅图
histo_match(Img2Gray, Img2GrayMatched, HistoRef)
* 融合回彩⾊图像
compose3(Img2GrayMatched, Img2GrayMatched, Img2GrayMatched, Img2MatchedTemp)
convert_image_type(Img2MatchedTemp, Img2Matched, 'byte')
* 3. 特征匹配:提取SURF特征点
find_surface_points(Img1, KeyPoints1, 'surf', 'contrast_threshold', 0.04)
find_surface_points(Img2Matched, KeyPoints2, 'surf', 'contrast_threshold',
0.04)
compute_surface_descriptors(Img1, KeyPoints1, Descriptors1, 'surf')
compute_surface_descriptors(Img2Matched, KeyPoints2, Descriptors2, 'surf')
* 4. 匹配特征点并计算单应矩阵
match_descriptors(Descriptors1, Descriptors2, MatchingPairs, 'nn', 0.75)
select_matching_points(KeyPoints1, KeyPoints2, MatchingPairs, Points1, Points2)
homography_to_3d(Points1, Points2, HomMat2D, 'ransac', 5.0, 0.99, 1000)
* 5. 图像变换与拼接
affine_trans_image(Img1, Img1Trans, HomMat2D, 'bilinear', 'false')
* 融合图像(简单加权融合)
gen_image_const(ImgBlack, 'byte', Width1 + Width2, max(Height1, Height2))
paint_region(ImgBlack, ImgBlack, Img2, Img2Paint, 0, 'fill')
paint_region(ImgBlack, ImgBlack, Img1Trans, Img1Paint, 0, 'fill')
alpha_blend(Img1Paint, Img2Paint, ImgBlended, 0.5, 0.5)
* 6. 显⽰结果
dev_display(ImgBlended)
disp_message(WindowHandle, '跨设备拼接结果', 'window', 10, 10, 'black', 'true')代码关键说明
-
OpenCV版:整合了直方图匹配(亮度对齐)、特征区域校准(色彩对齐)和图像拼接三大功能,分步实现色彩统一与拼接,方便调试;
-
Halcon版 :调用工业级的
histo_match和find_surface_points函数,简化了色彩校正和特征提取流程,alpha_blend实现了图像的平滑融合,适配产线稳定运行; -
参数调整 :特征点数量(
feature_num)可根据图像纹理调整,纹理丰富的图像设为100,纹理单一的设为30;直方图匹配可选择RGB全通道匹配(精度更高,速度稍慢)。
🎯四、工业落地:4个关键技巧,让色彩统一更稳定
✅1. 硬件选型优先统一
-
尽量选择同品牌、同型号、同批次的相机和镜头,减少硬件固有差异;
-
采用统一的光源系统(如同一品牌的条形光源),保证各相机的光照环境一致。
✅2. 校准标靶定期更新
-
标准色卡/灰度卡需定期校准(每年1次),避免标靶老化导致的校正误差;
-
产线中的固定色标,需定期清洁,防止灰尘、油污覆盖影响色彩采集。
✅3. 分区域处理复杂场景
-
对于大视野、光照不均的场景,将图像分块,对每个区块单独进行色彩校正,再拼接,能提升整体色彩一致性;
-
重点关注重叠区域的色彩过渡,这是拼接后视觉效果的关键。
✅4. 实时监控色彩偏差
- 在拼接系统中加入色彩偏差检测模块,实时计算各设备图像与参考图像的色彩偏差值,若偏差超过阈值(如ΔE>2),自动触发重新校正。
🎯五、避坑指南:3个常见误区
-
误区1:"只做几何拼接,忽视色彩校正"------跨设备图像的几何对齐再精准,色彩偏差也会让拼接图出现明显断层,色彩校正与几何拼接同等重要;
-
误区2:"用单一方法解决所有偏差"------硬件差异导致的偏差用参数归一化,光照差异用直方图匹配,复杂色偏用深度学习,需组合使用;
-
误区3:"过度校正色彩"------色彩校正过度会导致图像细节丢失(如零件的缺陷特征被掩盖),以"拼接后无明显断层且保留细节"为标准。
🎯六、总结:跨设备图像拼接的"核心逻辑"
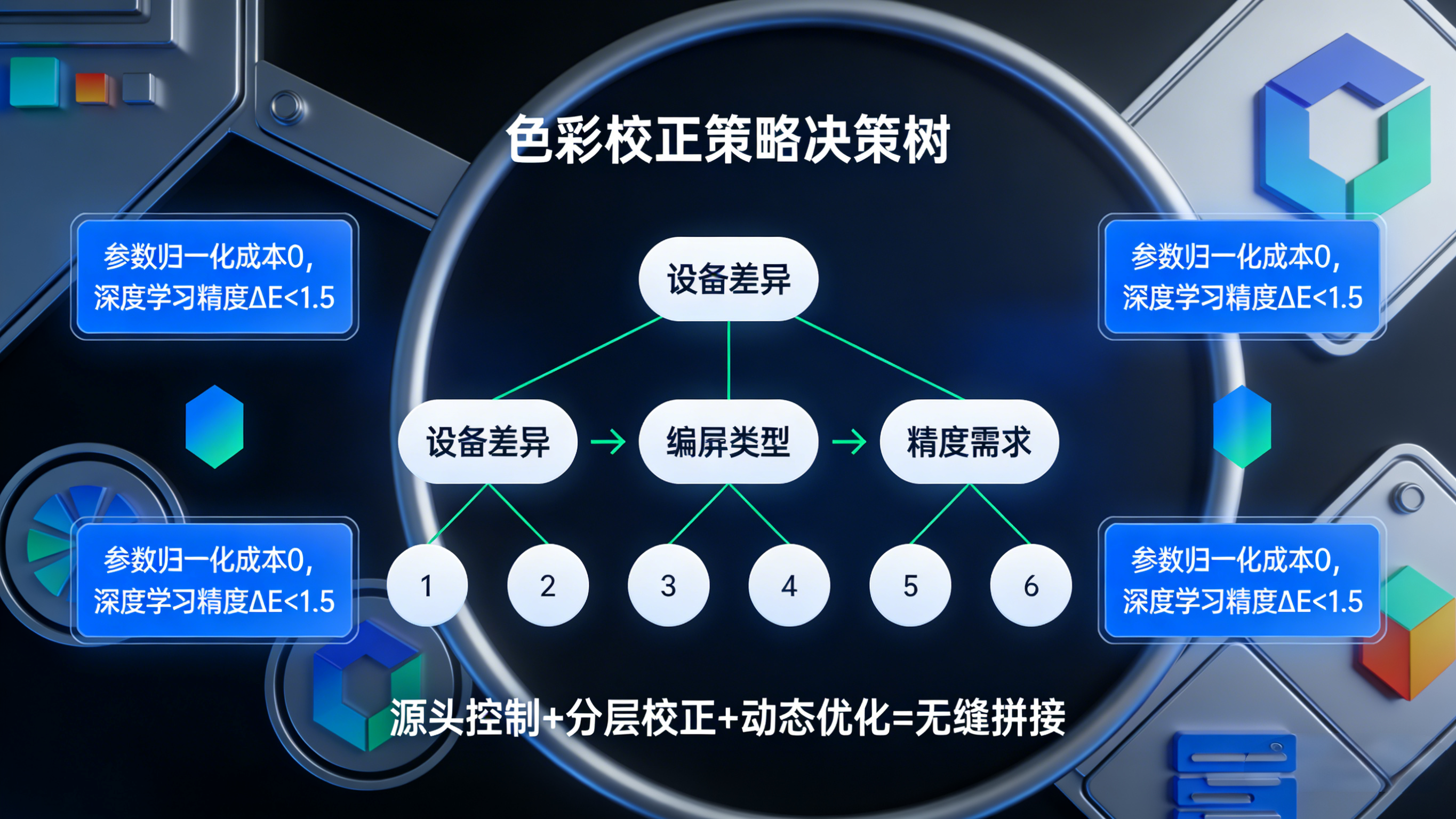
跨设备图像拼接的色彩统一,核心是**"源头控制+参考校准+融合平滑"**:先通过参数归一化和硬件统一减少偏差,再通过灰度卡、直方图匹配等方法校准色彩,最后通过多尺度融合实现无缝过渡。
8个策略从基础到高级,按需组合即可:常规场景用"参数归一化+直方图匹配",高精度场景用"灰度卡校正+色域映射",复杂场景用"深度学习色彩迁移"。