一、工业领域相机特点
工业相机为工业自动化场景量身定制,,其核心使命是采集图像数据,为机器视觉算法提供分析数据,需要工业相机 "稳定、精准、可重复"。应用场景比如产品缺陷检测、尺寸测量、条码识别、定位贴合等

1.1 工业相机需求:
1、追求高信噪比(SNR),不常用锐化、降噪等会改变原始图像细节的算法,可能导致缺陷漏检;
2、在均匀环境下,图像均匀性好,无坏点;
3、支持全局快门,可以避免运动模糊;或者检测物体静止,使用卷帘快门抓图;
1.2 工业面阵相机的核心场景(仅工业领域):
- 缺陷检测:如手机屏幕划痕、PCB 板焊锡缺陷、瓶盖破损;
- 尺寸测量:如轴承内径、螺丝长度、芯片引脚间距(精度可达 μm 级);
- 定位贴合:如机器人抓取零件时的精准定位、屏幕与中框的贴合对齐;
- 条码 / 字符识别:如产品追溯码、零件编号的高速识别(适配生产线)。
二、提升工业相机图像亮度
机器视觉需要采集图像,并处理图像并分析图像,来进行后续缺陷检测等工作。如果采集的图像特别暗,就不利于缺陷识别和检测。
2.1 sensor像元面积
sensor的分辨率、像元面积是固定的,同样的生产工艺下,像元面积越大,单位时间内接收到的光子越多,转换的灰度值越大。
2.2 曝光时间
增加曝光时间就是增加像元接受光子的时间,时间越长,光子量越多,像消费级相机在夜景拍摄时就会通过超长曝光来增加进光量,提升画面亮度。
工业场景下一般可以通过补光来增加环境亮度,但是一些缺陷需要无光照环境来采图检测,比如LCD屏幕缺陷检测最低亮度下的缺陷。
全局曝光相机的所有像素同时曝光、同时读出,读出时间固定;而卷帘曝光相机(常见于低成本 CMOS 相机)逐行曝光、逐行读出,曝光时间与读出时间部分重叠,实际帧率会更高,拍摄高速运动目标物体会变形。
2.3 模拟增益、数字增益
sensor通常支持模拟增益、数字增益等,模拟增益在图像传感器的模拟信号处理阶段对电信号进行放大,放大信号的同时,也会放大传感器本身的暗电流噪声、电路热噪声等模拟噪声。
数字增益通常为数字倍数乘积,放大信号的同时也放大量化噪声。
因此优先提高模拟增益,画面噪声相比提升数字增益更小。
2.4 相机光圈、环境光照
可调节光圈的镜头,当镜头的f焦距固定,F#越小,镜头入瞳直径(通光孔径)越大,进光量更大,能提升画面亮度。
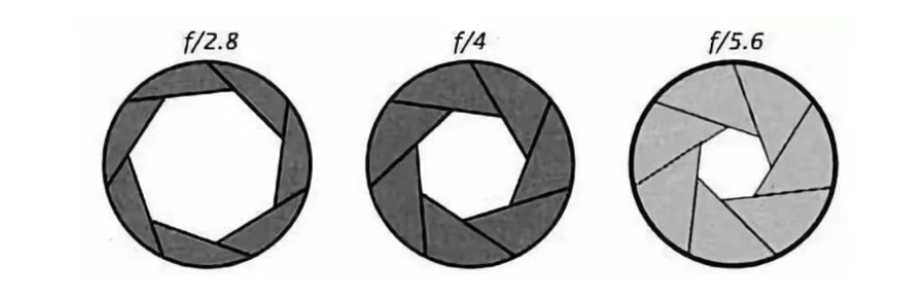
但是实际应用中,相机光圈调试阶段调试好之后就不会再改变了。

2.5 相机自带算法
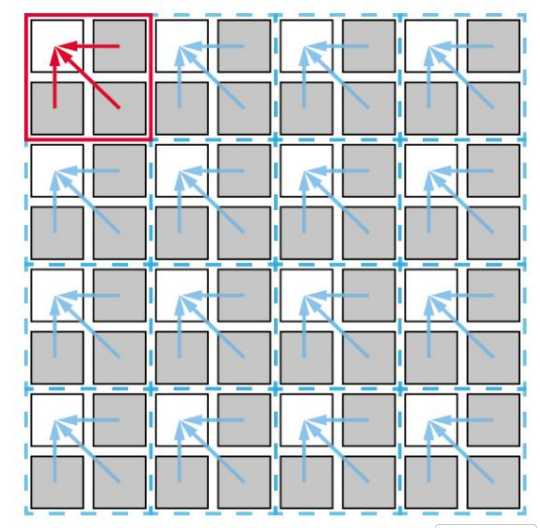
工业相机的算法相对更追求自然和原始效果,尽量不用锐化、滤波等会改变图像细节的算法;为了追求检测效率,减少使用复杂的ISP算法。提升亮度可以使用binning、gamma等算法。
binning使用求和模式提升亮度,但是会减少图像分辨率,例如使用2X2求和binning,分辨率为使用前的1/4。
gamma参数小于1可以提高亮度,gamma灰度映射是非线性映射,不同灰度区间的灰度提升不同。
三、总结
提升图像亮度的方式有很多,但每种方式几乎都伴随着不利的影响,如:
1、优先调节曝光时间,但是曝光时间过长会影响检测效率,且检测物体移动的话会有拖影;
3、相比数字增益,先调高模拟增益,会出现更多的噪声;
3、用Binning提升亮度,分辨率会降低,对于高精度检测是不可行的
综上,需要平衡多方因素选择或组合的方式进行调节,改善图像亮度。
觉得本文对您有一点帮助,欢迎讨论、点赞、收藏,您的支持激励我多多创作。