请注意:笔记内容片面粗浅,请读者批判着阅读!
在传统图像处理中,灰度变换 和空间滤波 通常采用确定性数学方法(如直方图均衡化、均值滤波等)。但当面对图像中的不确定性 (如光照不均、噪声模糊性、边缘过渡区)时,模糊逻辑(Fuzzy Logic)展现出了独特优势。
一、模糊理论基础
1.1 模糊集合与隶属函数
模糊集合突破了传统二值逻辑(0或1),允许元素以隶属度(0到1之间的值)表示归属程度。例如在灰度图像中,可将像素分为"暗"、"中灰"、"亮"三个模糊集合,通过高斯型或三角形隶属函数量化其归属程度。
python
import numpy as np
import skfuzzy as fuzz
import matplotlib.pyplot as plt
# 定义灰度值范围 [0,255]
gray_levels = np.arange(0, 256, 1)
# 创建三个模糊集合的隶属函数
dark = fuzz.gaussmf(gray_levels, 50, 30) # 中心50,标准差30
medium = fuzz.gaussmf(gray_levels, 128, 40)
bright = fuzz.gaussmf(gray_levels, 200, 30)
# 可视化
plt.figure()
plt.plot(gray_levels, dark, 'b', linewidth=1.5, label='Dark')
plt.plot(gray_levels, medium, 'g', linewidth=1.5, label='Medium')
plt.plot(gray_levels, bright, 'r', linewidth=1.5, label='Bright')
plt.legend()
plt.title('Fuzzy Membership Functions')
plt.show()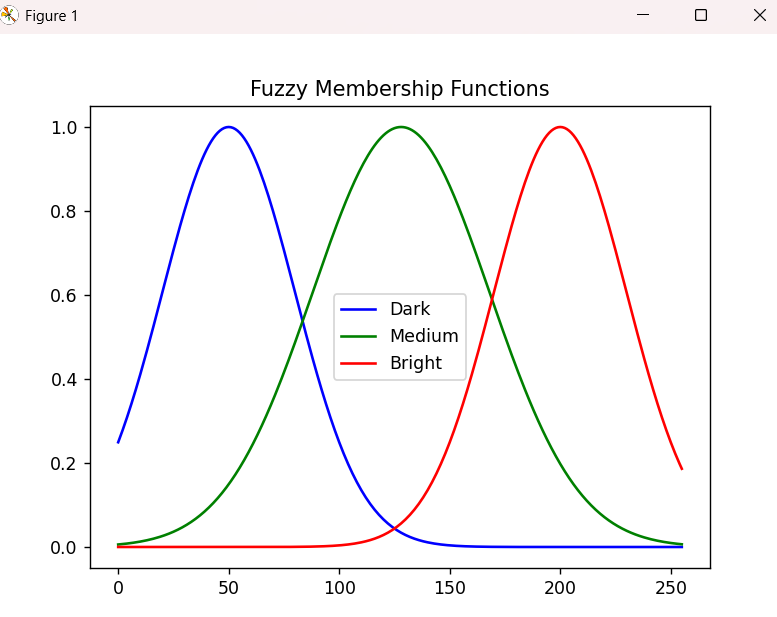
1.2 模糊规则库
基于专家经验构建推理规则,例如:
- 规则1:如果像素属于"暗"区域,则增强其对比度;
- 规则2:如果像素属于"亮"且邻域差异大,则进行锐化。
二、模糊强度变换应用
根据应用场景设计逻辑规则:
python
规则1:IF 像素属于Dark → THEN 输出更暗(如原值×0.8)
规则2:IF 像素属于Gray → THEN 保持原值
规则3:IF 像素属于Bright → THEN 输出更亮(如原值×1.2) 2.1 自适应对比度增强
传统直方图均衡化可能过度增强噪声,而模糊方法通过动态调整增强强度实现更自然的变换。
实现步骤:
- 计算每个像素的暗/中/亮隶属度
- 根据规则计算增强权重
- 合成新像素值
python
import cv2
from skimage import data, color
import numpy as np
import matplotlib.pyplot as plt
import skfuzzy as fuzz
# 感受一下即可,我已经尽力了。。。
def fuzzy_contrast_enhance(img):
# 灰度化
gray = color.rgb2gray(img) * 255
enhanced = np.zeros_like(gray)
for i in range(gray.shape[0]):
for j in range(gray.shape[1]):
# 计算当前像素隶属度
dark_mf = fuzz.gaussmf(gray[i, j], 50, 30)
medium_mf = fuzz.gaussmf(gray[i, j], 128, 40)
bright_mf = fuzz.gaussmf(gray[i, j], 200, 30)
# 应用规则:暗区线性增强,亮区保持
new_val = 0.8 * dark_mf * (gray[i, j] * 1.5) + \
0.2 * medium_mf * gray[i, j] + \
0.1 * bright_mf * gray[i, j]
enhanced[i, j] = np.clip(new_val, 0, 255)
return enhanced
img = data.astronaut()
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('Original')
plt.axis('off')
result = fuzzy_contrast_enhance(img)
plt.subplot(1, 2, 2)
plt.imshow(result, cmap='gray')
plt.title('Fuzzy Contrast Enhance')
plt.axis('off')
plt.show()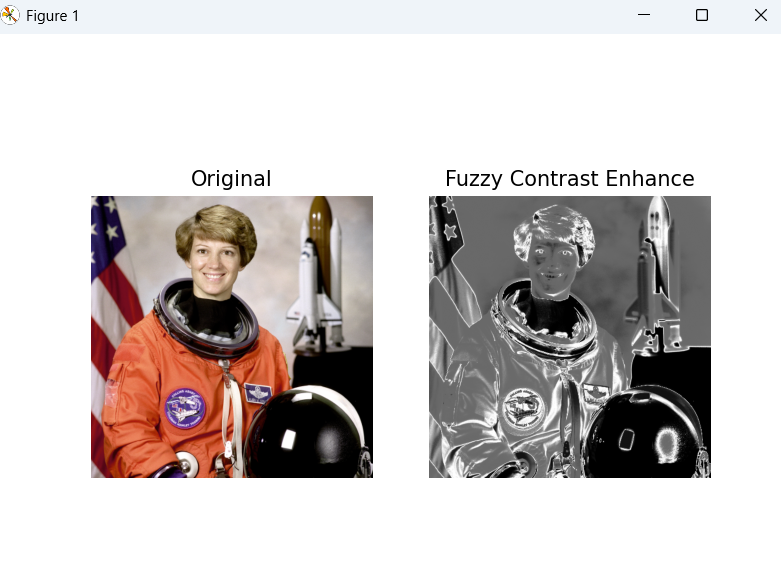
2.2 与传统方法对比
图中展示了模糊增强(右)与直方图均衡化(左)的效果差异,可见模糊方法在保留亮部细节的同时更自然地增强了暗部。
三、模糊空间滤波设计
3.1 边缘检测滤波器
传统Sobel算子对噪声敏感,而模糊滤波器可通过分析邻域灰度差异的隶属度实现鲁棒检测。
设计步骤:
- 定义邻域差异的模糊集合(小/中/大)
- 构建规则:"若差异大,则标记为边缘"
- 去模糊化输出边缘强度
python
import numpy as np
import skfuzzy as fuzz
from scipy.ndimage import convolve
from skimage import data, color
import matplotlib.pyplot as plt
def fuzzy_edge_detection(img):
"""基于模糊逻辑的边缘检测"""
# 输入处理
if len(img.shape) == 3:
gray = color.rgb2gray(img) * 255
else:
gray = img.astype(float)
gray = np.clip(gray, 0, 255).astype(np.uint8)
# Sobel梯度计算
sobel_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
sobel_y = np.array([[1, 2, 1], [0, 0, 0], [-1, -2, -1]])
grad_x = convolve(gray, sobel_x)
grad_y = convolve(gray, sobel_y)
gradient = np.sqrt(grad_x ** 2 + grad_y ** 2)
# 梯度幅值归一化
gradient = (gradient / gradient.max()) * 255 # 归一化到[0,255]
gradient = gradient.astype(np.uint8) # 转换为整数
# 定义梯度隶属函数
grad_levels = np.arange(0, 256)
low = fuzz.trapmf(grad_levels, [0, 20, 60, 100]) # 低梯度过渡区
high = fuzz.trapmf(grad_levels, [60, 100, 255, 255]) # 高梯度响应区
# 预计算隶属度
high_mf = fuzz.interp_membership(grad_levels, high, grad_levels)
# 应用模糊规则
edge_strength = high_mf[gradient] * 255
return edge_strength.astype(np.uint8)
if __name__ == "__main__":
img = data.camera()
edges = fuzzy_edge_detection(img)
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('Original')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(edges, cmap='gray', vmin=0, vmax=255) # 强制显示范围
plt.title('Fuzzy Edges (Fixed)')
plt.axis('off')
plt.show()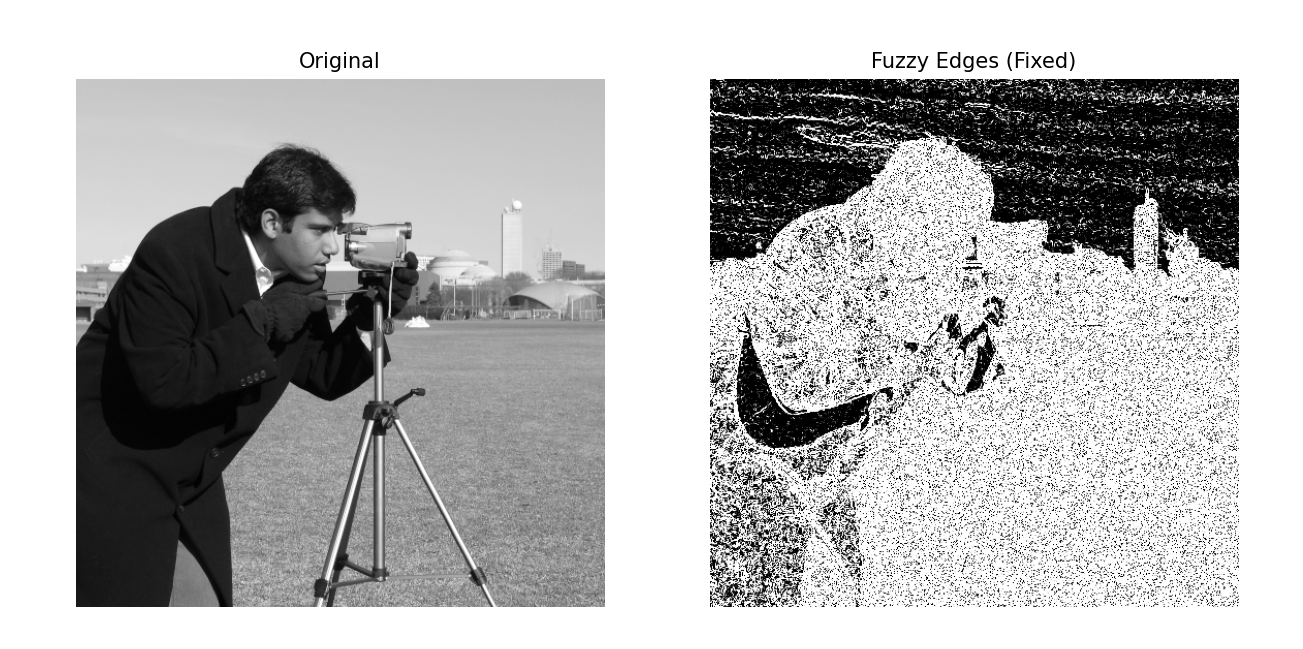
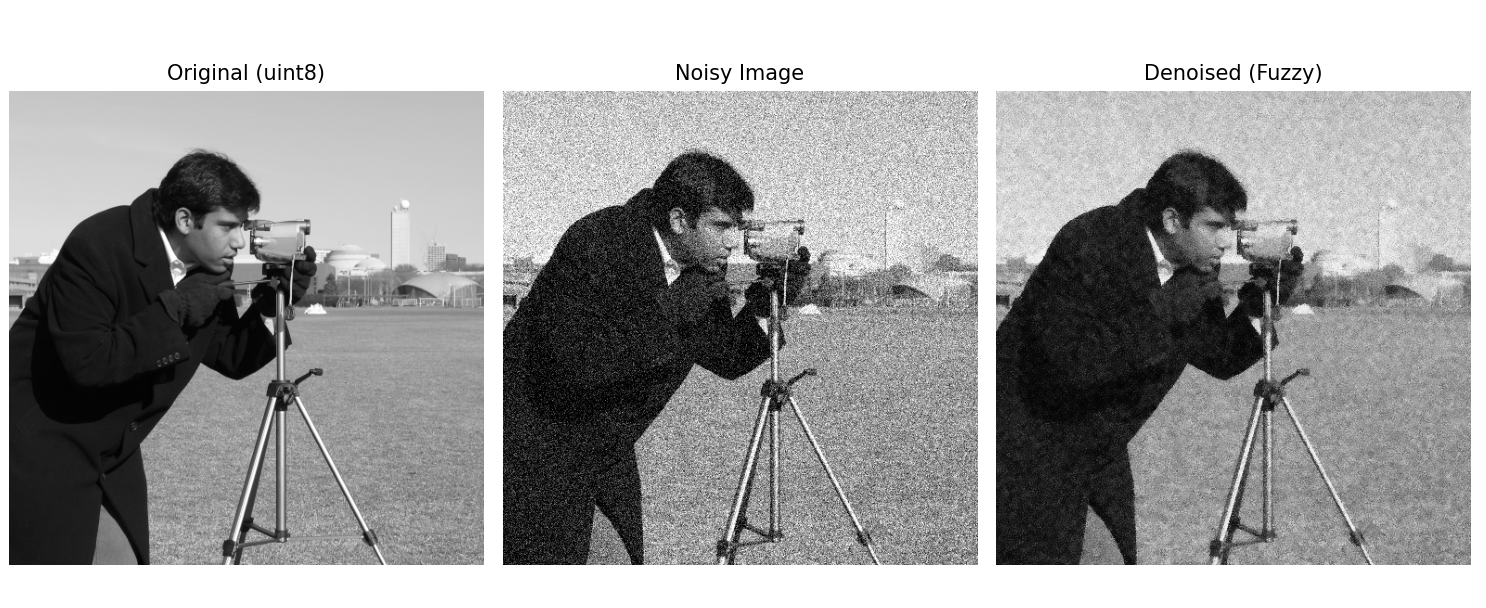
3.2 去噪滤波器
通过分析邻域像素的相似度隶属度,动态调整滤波强度:
python
import numpy as np
from skimage import data, util, color
import matplotlib.pyplot as plt
from skimage.util import view_as_windows
def fuzzy_denoise(img, window_size=5, sigma=30):
# 强制转为浮点灰度图
if len(img.shape) == 3:
img = color.rgb2gray(img) * 255
img = img.astype(np.float32)
# 镜像填充
pad = window_size // 2
padded = np.pad(img, pad, mode='reflect')
# 向量化窗口操作
windows = view_as_windows(padded, (window_size, window_size))
h, w = img.shape
denoised = np.zeros_like(img)
for i in range(h):
for j in range(w):
window = windows[i, j]
center = window[pad, pad]
# 计算相似度(优化防零除)
diffs = np.abs(window - center)
similarity = np.exp(-diffs / sigma) # 高斯型隶属函数
sum_weights = np.sum(similarity) + 1e-6 # 确保分母非零
denoised[i, j] = np.sum(window * similarity) / sum_weights
# 归一化并转为uint8
denoised = np.clip(denoised, 0, 255).astype(np.uint8)
return denoised
if __name__ == "__main__":
# 生成有效测试数据
original = data.camera().astype(np.uint8) # 确保输入为uint8
noisy = util.random_noise(original, mode='gaussian', var=0.02) # 生成[0,1]浮点
noisy = (noisy * 255).astype(np.uint8) # 正确转换为uint8
# 去噪处理
denoised = fuzzy_denoise(noisy, sigma=40, window_size=7)
# 正确显示图像
plt.figure(figsize=(12, 6))
plt.subplot(1, 3, 1)
plt.imshow(original, cmap='gray', vmin=0, vmax=255)
plt.title('Original (uint8)')
plt.axis('off')
plt.subplot(1, 3, 2)
plt.imshow(noisy, cmap='gray', vmin=0, vmax=255)
plt.title('Noisy Image')
plt.axis('off')
plt.subplot(1, 3, 3)
plt.imshow(denoised, cmap='gray', vmin=0, vmax=255)
plt.title('Denoised (Fuzzy)')
plt.axis('off')
plt.tight_layout()
plt.show()