Linux驱动开发实战(九):Linux内核pinctrl_map详解与优势分析
文章目录
- Linux驱动开发实战(九):Linux内核pinctrl_map详解与优势分析
- 前言
- 回顾一下什么是pinctrl
- pinctrl_map详解
- pinctrl_map的优势
-
- [1. 与传统硬编码方式对比](#1. 与传统硬编码方式对比)
- [2. 与芯片厂商专有驱动对比](#2. 与芯片厂商专有驱动对比)
- [3. 设计优势](#3. 设计优势)
-
- [3.1 抽象和分离](#3.1 抽象和分离)
- [3.2 系统集成](#3.2 系统集成)
- [3.3 灵活性](#3.3 灵活性)
- 在驱动开发中的应用
- 总结
前言
在嵌入式Linux开发中,引脚控制pinctrl是一个非常重要的概念。无论是开发板级支持包(BSP)还是设备驱动,我们都需要正确配置芯片引脚的功能和电气特性。本文将深入分析Linux内核中的pinctrl_map机制,解析其工作原理,并与传统引脚控制方式进行对比,展示其在现代嵌入式系统开发中的优势
回顾一下什么是pinctrl
现代SoC(片上系统)的物理引脚通常支持多种功能。例如,同一个引脚可能既可以作为GPIO(通用输入输出),也可以作为I2C、SPI或UART等接口的一部分。如何选择和配置这些引脚的功能,就是pinctrl子系统要解决的问题。
Linux内核中的pinctrl子系统负责:
- 引脚复用(pinmux):选择引脚的功能
- 引脚配置(pinconf):设置引脚的电气特性(如上拉/下拉电阻、驱动强度等)
- 引脚分组(pin groups):管理相关引脚的集合
pinctrl_map详解
基本概念
pinctrl_map是Linux内核中的一个数据结构,用于描述引脚如何被配置。每个pinctrl_map描述一条配置信息,包括以下关键信息:
-
类型:主要有两种类型
PIN_MAP_TYPE_MUX_GROUP:配置引脚的复用功能PIN_MAP_TYPE_CONFIGS_PIN:配置引脚的具体参数
-
名称:设备或引脚的标识符
-
配置数据:具体的配置值
核心数据结构
pinctrl_map的定义如下:
c
struct pinctrl_map {
const char *dev_name; /* 设备名 */
const char *name; /* 状态名或引脚名 */
enum pinctrl_map_type type; /* 映射类型 */
union {
struct pinctrl_map_mux mux; /* 复用信息 */
struct pinctrl_map_configs configs; /* 配置信息 */
} data;
};工作流程
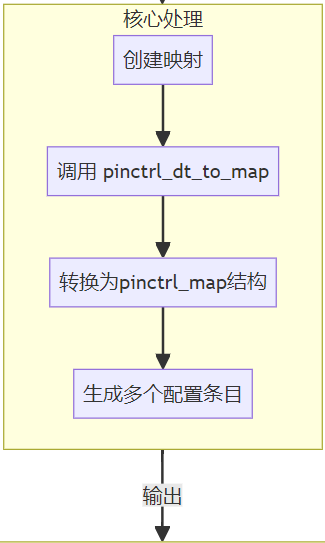
当内核启动或设备被激活时,pinctrl_map的工作流程如下:
- 读取配置信息:
- 从设备树(Device Tree)或板级配置文件中读取引脚配置信息
- 这些信息定义了哪些引脚应该被配置为什么功能
- 创建映射:
pinctrl_dt_to_map()函数将设备树的配置信息转换为pinctrl_map结构- 通常会为一个设备创建多个
pinctrl_map条目
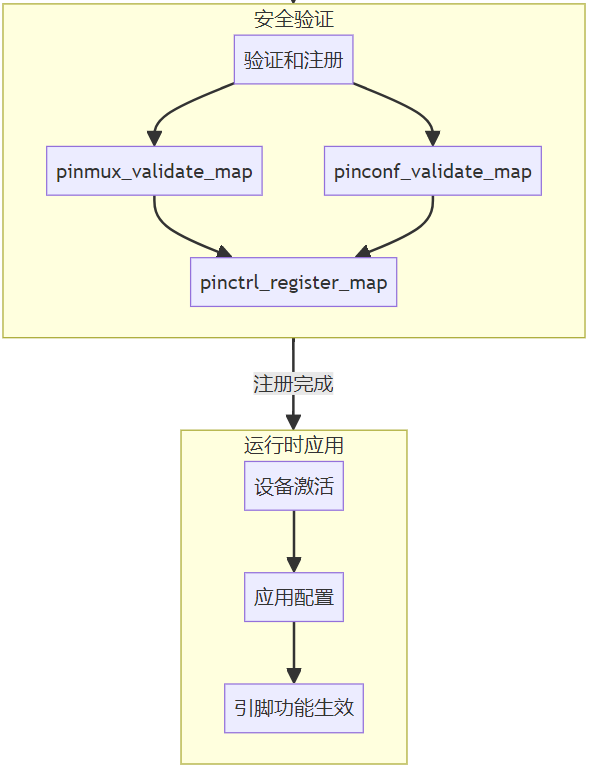
- 验证和注册:
pinmux_validate_map()和pinconf_validate_map()确保配置有效- 然后通过
pinctrl_register_map()注册到系统
- 应用配置:
- 当设备被激活时,系统会应用相应的
pinctrl_map配置

实际示例
以UART设备为例,假设我们需要使用芯片上的两个引脚(TX和RX):
c
// 伪代码:创建pinctrl_map
// 设置引脚功能为UART
map[0].type = PIN_MAP_TYPE_MUX_GROUP;
map[0].name = "uart1";
map[0].data.mux.function = "uart";
map[0].data.mux.group = "uart1_pins";
// TX引脚电气特性配置
map[1].type = PIN_MAP_TYPE_CONFIGS_PIN;
map[1].name = "uart1";
map[1].data.configs.pin_name = "tx";
map[1].data.configs.configs = {驱动强度, 上拉电阻等};
// RX引脚电气特性配置
map[2].type = PIN_MAP_TYPE_CONFIGS_PIN;
map[2].name = "uart1";
map[2].data.configs.pin_name = "rx";
map[2].data.configs.configs = {驱动强度, 上拉电阻等};pinctrl_map的优势
与传统的引脚控制方法相比,pinctrl_map提供了多方面的优势:
1. 与传统硬编码方式对比
传统硬编码方式:
c
// 直接操作硬件寄存器
GPIOA->MODER |= (1 << 10); // 设置引脚为输出模式
GPIOA->PUPDR |= (2 << 10); // 设置引脚为下拉pinctrl_map方式:
- 声明式配置,无需了解寄存器细节
- 配置与驱动分离,可在设备树中定义
- 硬件变更时只需修改底层驱动,应用代码无需变动
2. 与芯片厂商专有驱动对比
芯片厂商专有驱动:
- 不同芯片的API不同,无统一标准
- 跨平台开发困难,需要学习多套API
- 代码可移植性差
pinctrl_map框架:
- 提供统一的抽象层和API
- 驱动开发人员使用一致的接口
- 大幅提高代码可移植性和复用性
3. 设计优势
3.1 抽象和分离
- 硬件抽象: 隐藏底层硬件细节,提供统一接口
- 关注点分离: 引脚配置与业务逻辑分离,使驱动代码更简洁
- 声明式配置: 可以在设备树中以声明方式配置,而非命令式
3.2 系统集成
- 与设备生命周期绑定: 引脚配置与设备生命周期关联,自动管理
- 上下文感知: 可根据系统状态(如休眠、唤醒)自动切换引脚配置
- 冲突检测: 可以检测并防止引脚配置冲突
3.3 灵活性
- 多状态支持: 一个设备可以有多种引脚状态(如"default"、"sleep"等)
- 动态切换: 可在运行时切换引脚状态
- 组管理: 可以批量管理一组相关引脚
在驱动开发中的应用
在实际的驱动开发中,我们通常不需要直接操作pinctrl_map,而是:
- 在设备树中定义引脚配置:
c
&uart1 {
pinctrl-names = "default", "sleep";
pinctrl-0 = <&uart1_pins_default>;
pinctrl-1 = <&uart1_pins_sleep>;
status = "okay";
};
&pinctrl {
uart1_pins_default: uart1-default {
pins = "PB0", "PB1";
function = "uart";
drive-strength = <8>;
bias-pull-up;
};
uart1_pins_sleep: uart1-sleep {
pins = "PB0", "PB1";
function = "gpio";
bias-pull-down;
};
};- 在驱动中使用API来选择预定义的引脚状态:
c
struct pinctrl *p;
struct pinctrl_state *default_state;
// 获取设备的pinctrl句柄
p = devm_pinctrl_get(&pdev->dev);
if (IS_ERR(p)) {
return PTR_ERR(p);
}
// 获取默认状态
default_state = pinctrl_lookup_state(p, "default");
if (IS_ERR(default_state)) {
return PTR_ERR(default_state);
}
// 应用默认状态
return pinctrl_select_state(p, default_state);内核会自动将设备树中的描述转换为pinctrl_map并应用配置。
总结
pinctrl_map作为Linux内核引脚控制子系统的核心机制,提供了一种统一、灵活、可维护的引脚管理方式。相比传统方法,它具有以下主要优势:
- 提供统一的引脚控制抽象,简化驱动开发
- 实现配置与驱动逻辑分离,提高代码可维护性
- 支持多状态管理,便于实现低功耗和动态切换
- 具备冲突检测能力,提高系统稳定性
- 与设备生命周期集成,简化资源管理
对于现代嵌入式Linux系统开发,掌握pinctrl_map的工作原理和使用方法,对于提高开发效率、降低维护成本和增强系统可靠性至关重要。